机器人系统的制作方法
本公开涉及机器人系统。
背景技术:
1、在专利文献1中,公开了一种系统,该系统具备:对工件进行搬运的工件输送机;和机器人,其对由工件输送机搬运来的工件进行把持,并堆码在托盘上。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开平07-214485号公报
技术实现思路
1、本公开提供一种对以高效率搬运工件有效的机器人系统。
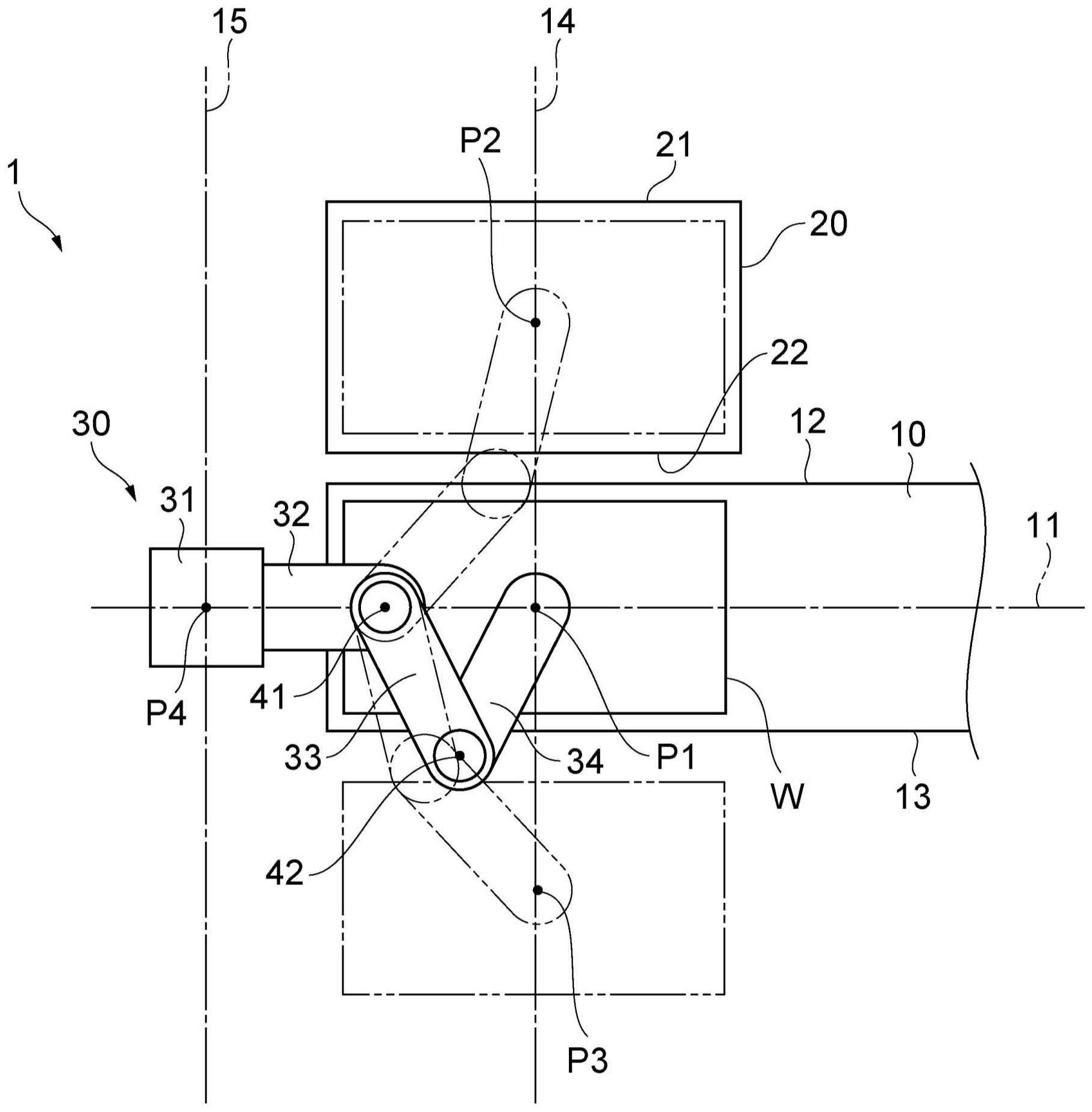
2、本公开的一方面的机器人系统具备:第一搬运装置,其沿着水平的搬运线将工件搬运到第一位置;第二搬运装置,其从第二位置搬运工件,所述第二位置沿着与搬运线垂直的第一线而与第一位置相邻;以及机器人,其固定于固定位置,将工件从第一位置搬运到第二位置,所述固定位置朝向第一搬运装置对工件的搬运方向与第一线分离,机器人具有:基部,其固定于固定位置,使臂基座升降;第一臂,其以绕铅垂的第一轴线旋转的方式与臂基座连接,并向远离第一轴线的方向延伸;第二臂,其以绕铅垂的第二轴线旋转的方式与第一臂连接,并向远离第二轴线的方向延伸;臂末端部,其以绕铅垂的第三轴线旋转的方式与第二臂连接;以及工件保持部,其设置于臂末端部的下方,从上方保持工件。
3、根据本公开,能够提供对以高效率搬运工件有效的机器人系统。
技术特征:
1.一种机器人系统,其具备:
2.根据权利要求1所述的机器人系统,其中,
3.根据权利要求2所述的机器人系统,其中,
4.根据权利要求3所述的机器人系统,其中,
5.根据权利要求2至4中的任一项所述的机器人系统,其中,
6.根据权利要求1至4中的任一项所述的机器人系统,其中,
7.根据权利要求6所述的机器人系统,其中,
8.根据权利要求7所述的机器人系统,其中,
9.根据权利要求7所述的机器人系统,其中,
10.根据权利要求1至4中的任一项所述的机器人系统,其中,
11.根据权利要求10所述的机器人系统,其中,
12.根据权利要求1至3中的任一项所述的机器人系统,其中,
13.根据权利要求12所述的机器人系统,其中,
14.根据权利要求13所述的机器人系统,其中,
15.根据权利要求12所述的机器人系统,其中,
16.根据权利要求15所述的机器人系统,其中,
17.根据权利要求1至4中的任一项所述的机器人系统,其中,
18.根据权利要求17所述的机器人系统,其中,
19.根据权利要求18所述的机器人系统,其中,
20.根据权利要求1至4中的任一项所述的机器人系统,其中,
21.根据权利要求1至4中的任一项所述的机器人系统,其中,
技术总结
一种机器人系统,其对以高效率搬运工件是有效的。机器人系统(1)具备:第一搬运装置(10),其将工件沿着搬运线(11)搬运到第一位置(P1);第二搬运装置(20),其从第二位置(P2)搬运工件,该第二位置沿着与搬运线垂直的第一线(14)而与第一位置相邻;以及机器人(30),机器人具有:基部(31),其在朝向第一搬运装置(10)对工件的搬运方向与第一线分离的固定位置处使臂基座(32)升降;第一臂(33),其绕铅垂的第一轴线(41)旋转;第二臂(34),其绕铅垂的第二轴线(42)旋转;臂末端部(35),其绕铅垂的第三轴线(43)旋转;以及工件保持部(36),其在臂末端部的下方处从上方保持工件。
技术研发人员:田代晃浩,土谷恭平,赵成弼
受保护的技术使用者:株式会社安川电机
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!