关节电机及机器人的制作方法
本发明涉及机械装置,特别涉及一种关节电机和机器人。
背景技术:
1、关节电机,是一种应用于机器人的机身与机械臂的电机,关节电机能够与其安装处发生相对转动,以对机器人的运动提供特定方向上的自由度。
2、现有技术中,关节电机通常与机身为一体式的结构,这种一体式结构虽能对关机电机起到保护或防尘等作用,但却并不适用于一些需要频繁拆卸或快速装配的场合。
技术实现思路
1、本发明的主要目的是提供一种关节电机,旨在解决关节电机难以快速拆装的问题。
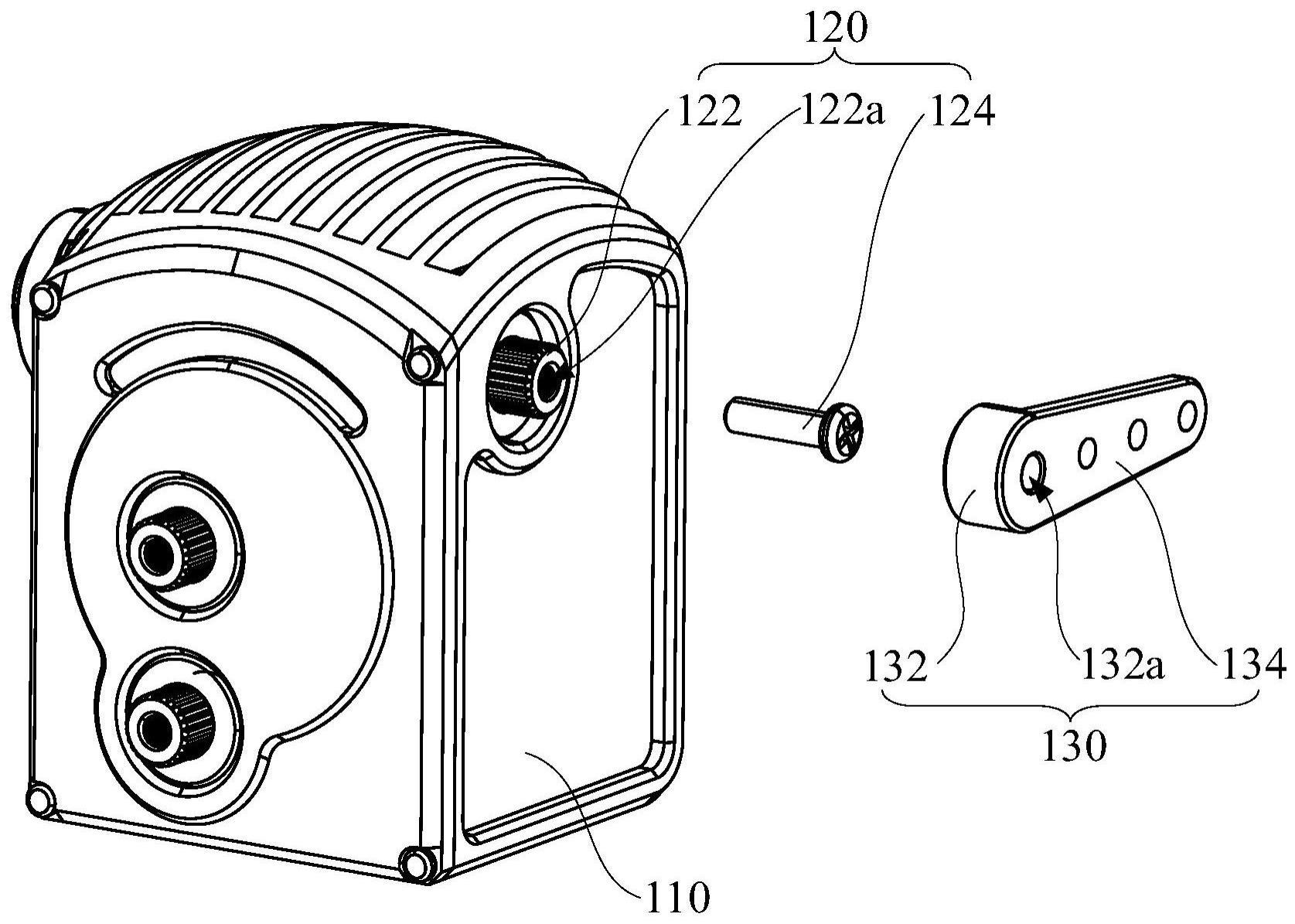
2、为实现上述目的,本发明提出的关节电机,用于转动安装在机器人上,包括电机本体,所述电机本体上设有用于输出扭矩的转动结构以及与所述转动结构啮合的安装件,所述安装件用于与所述机器人固定连接,
3、所述电机本体驱使所述转动结构转动时,所述转动结构与所述安装件相对转动,以使得所述电机本体与所述机器人相对转动。
4、优选地,所述安装件包括第一安装部以及第二安装部,所述第一安装部中空设置,且套设于所述转动结构的外周,所述第二安装部远离所述第一安装部的中心延伸,并用于与所述机器人固定连接。
5、优选地,所述转动结构包括与所述第一安装部啮合的啮合件,以及位于所述啮合件远离所述电机本体的一端的定位件,所述定位件与所述啮合件同轴设置,并用于与所述机器人转动连接。
6、优选地,所述啮合件靠近所述定位件的一端开设有定位孔,所述定位件可拆卸安装于所述定位孔内。
7、优选地,所述第一安装部上开设有通孔,所述定位件穿过所述通孔以与所述机器人连接。
8、优选地,所述电机本体上还设有用于与所述机器人转动连接的连接结构,所述连接结构位于所述电机本体远离所述转动结构的一端,且与所述转动结构同轴设置。
9、优选地,所述电机本体还包括用于与所述机器人连接的电线,所述连接结构设有过线孔,所述电线穿过所述过线孔与所述机器人连接。
10、优选地,所述连接结构包括远离所述电机本体延伸的凸台,所述凸台中空形成所述过线孔,所述凸台的外壁用于与所述机器人连接。
11、优选地,所述连接结构还包括滚动轴承与卡簧,所述滚动轴承的内环套设于所述凸台的外周,所述滚动轴承的外环用于嵌入所述机器人内;
12、所述凸台的外周设有均为环状的卡槽与卡台,所述卡槽与所述卡台分别位于所述滚动轴承的两侧,且所述卡台与所述电机本体抵接,所述卡簧卡设于所述卡槽内,以限位所述滚动轴承。
13、本发明还提出一种机器人,包括机身、机械臂以及如上述任一实施例所述的关节电机,所述关节电机转动设于所述机身上,所述机械臂设于所述关节电机上。
14、在本发明实施例中,关节电机放置于机器人后,使得安装件固定在机器人上。接着电机本体驱使转动结构转动,由于转动结构与安装件处于啮合状态,因此转动结构与安装件发生相对转动。再者,基于安装件被机器人限制的情形,进而使得电机本体相对机器人转动。本发明技术方案通过采用安装件与机器人连接,便能够实现电机本体与机器人相对转动的基础功能,相对于现有技术中关节电机与机器人一体式结构,拆卸与安装均更加便捷。
技术特征:
1.一种关节电机,用于转动安装在机器人上,其特征在于,包括电机本体,所述电机本体上设有用于输出扭矩的转动结构以及与所述转动结构啮合的安装件,所述安装件用于与所述机器人固定连接,
2.如权利要求1所述的关节电机,其特征在于,所述安装件包括第一安装部以及第二安装部,所述第一安装部中空设置,且套设于所述转动结构的外周,所述第二安装部远离所述第一安装部的中心延伸,并用于与所述机器人固定连接。
3.如权利要求2所述的关节电机,其特征在于,所述转动结构包括与所述第一安装部啮合的啮合件,以及位于所述啮合件远离所述电机本体的一端的定位件,所述定位件与所述啮合件同轴设置,并用于与所述机器人转动连接。
4.如权利要求3所述的关节电机,其特征在于,所述啮合件靠近所述定位件的一端开设有定位孔,所述定位件可拆卸安装于所述定位孔内。
5.如权利要求4所述的关节电机,其特征在于,所述第一安装部上开设有通孔,所述定位件穿过所述通孔以与所述机器人连接。
6.如权利要求1-5任意一项所述的关节电机,其特征在于,所述电机本体上还设有用于与所述机器人转动连接的连接结构,所述连接结构位于所述电机本体远离所述转动结构的一端,且与所述转动结构同轴设置。
7.如权利要求6所述的关节电机,其特征在于,所述电机本体还包括用于与所述机器人连接的电线,所述连接结构设有过线孔,所述电线穿过所述过线孔与所述机器人连接。
8.如权利要求7所述的关节电机,其特征在于,所述连接结构包括远离所述电机本体延伸的凸台,所述凸台中空形成所述过线孔,所述凸台的外壁用于与所述机器人连接。
9.如权利要求8所述的关节电机,其特征在于,所述连接结构还包括滚动轴承与卡簧,所述滚动轴承的内环套设于所述凸台的外周,所述滚动轴承的外环用于嵌入所述机器人内;
10.一种机器人,其特征在于,包括机身、机械臂以及如权利要求1-9任意一项所述的关节电机,所述关节电机转动设于所述机身上,所述机械臂设于所述关节电机上。
技术总结
本发明公开一种关节电机和机器人,其中机器人包括电机本体,电机本体上设有用于输出扭矩的转动结构以及与转动结构啮合的安装件,安装件用于与机器人固定连接,电机本体驱使转动结构转动时,转动结构与安装件相对转动,以使得电机本体与机器人相对转动。本发明技术方案通过采用安装件与机器人连接,便能够实现电机本体与机器人相对转动的基础功能,相对于现有技术中关节电机与机器人一体式结构,拆卸与安装均更加便捷。
技术研发人员:宋佩恒,杨天弘
受保护的技术使用者:恒之未来(重庆)创新科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!