一种紧凑型三自由度运动机器人关节及其控制模式
本发明属于工业机器人领域,涉及一种运动机器人关节,具体是采用永磁电机作为驱动的机器人关节。
背景技术:
1、关节机器人是最常见的工业机器人之一,也称关节手臂机器人或关节机械手臂,其适用于诸多工业领域的机械自动化作业。现有的机器人关节广泛地应用在工业自动化领域,且要求其精度高、寿命长、结构紧凑、能适应苛刻工作环境。传统的机器人关节往往内部需要复杂的零件配置,外部需要坚固耐用的壳体,这也导致其制造成本非常昂贵,而且尺寸较大,比较笨重。传统的机器人关节模组有以行星减速机为基础而集成电机、制动器、编码器等部件的结构,但其组装方式也是将各主要的部件轴向堆叠集成布置,呈现轴向较长的特点,加之行星减速机本身的径向尺寸较大,整个模组的体积也较大。
2、对于正在被越来越多地应用于生产线和设备周围的小型机器人,尤其是需要配合人来完成复杂操作的协作型机器人和移动型机器人,对更快的动作响应速度、更轻的装备重量、更趋多样化的机器人关节、更小的安装空间和更强的输出能力有严格的要求,所以减小机器人关节模组的体积和质量,提升机器人关节控制精度变得极为重要。机器人执行各种复杂的动作主要依靠关节上安装的电机驱动实现,因此关节上的电机是机器人最核心的部件,且要求其具有空间体积小、输出转矩大、重量轻和控制精度高等特征。而传统的机器人关节则越来越难以满足目前工业发展的应用需求。
3、永磁电机采用永磁体励磁,结构比较简单,不仅在体积和重量上具有优势,还具有高功率密度的特点,能够在较小体积内输出较大的功率。永磁电机控制方法简单且多样化,在面对不同的需求时可以采用不同的控制方法达到控制目的。永磁电机优异的转矩控制特性使得它更易于实现磁场的定向控制,从而动态特性和静态特性十分优异。盘式轴向励磁永磁电机具有结构紧凑、体积小、质量轻和转矩密度高等特点,相较于传统径向结构的永磁电机来说,盘式结构的永磁电机轴向尺寸比较小,在相同的体积下能输出更大的转矩。
技术实现思路
1、本发明的目的是为适应现有机器人关节的应用需求,提供一种紧凑型三自由度运动机器人关节及其控制模式,实现关节三个自由度的运动输出,并具有结构简单、紧凑、体积小、质量轻、易于控制且控制精度高的优势。
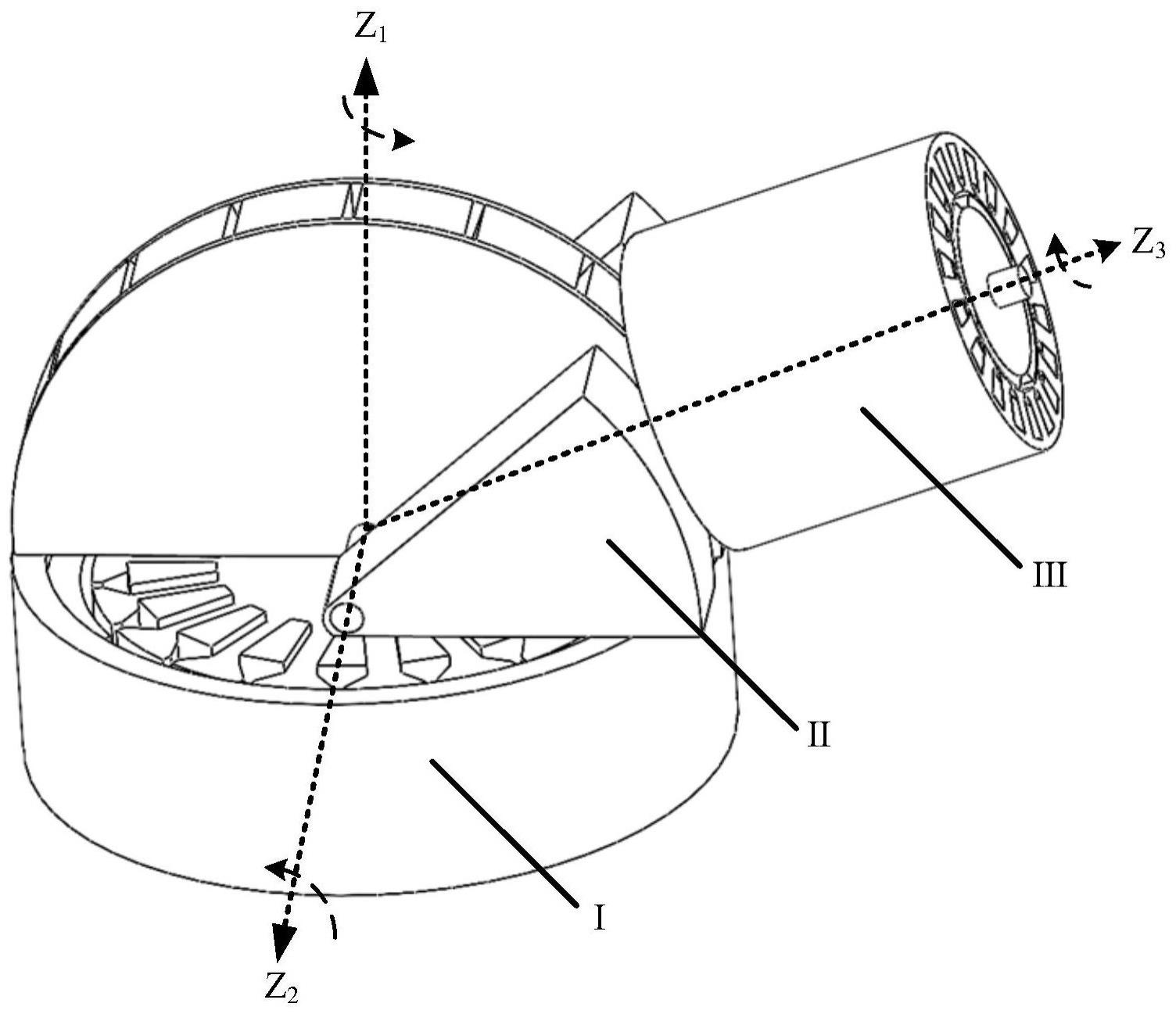
2、本发明一种紧凑型三自由度运动机器人关节采用的第一个技术方案是:包括依次连接的底座永磁电机、中间盘式永磁电机和终端永磁电机,底座永磁电机为外转子内定子式的径向励磁永磁电机,终端永磁电机为外定子内转子式的径向励磁永磁电机;中间盘式永磁电机是轴向励磁永磁电机,包括轴向布置的两个扇形的转子和一个半圆形定子,两个扇形的转子结构相同,对称布置在半圆形定子的轴向两侧,两个扇形的转子在面对着半圆形定子这一侧面上表贴永磁体,半圆形定子外部是半圆形定子支架,半圆形定子支架的外圆表面开有半圆形槽,半圆形槽内沿圆周方向均匀嵌有若干个定子铁心,定子铁心上绕有定子绕组;中间盘式永磁电机以底座永磁电机一端面的中心轴居中,半圆形定子与底座永磁电机的转子的该端面固定连接,随着底座永磁电机的转子旋转;终端永磁电机的定子一端面与所述的两个扇形的转子的外圆面中间共同固定连接,终端永磁电机随着所述的两个扇形的转子旋转;底座永磁电机、终端永磁电机的中心轴分别与中间盘式永磁电机的中心轴相垂直。
3、本发明一种紧凑型三自由度运动机器人关节采用的第二个技术方案是:包括依次连接的底座永磁电机、中间盘式永磁电机和终端永磁电机,底座永磁电机为外转子内定子式的径向励磁永磁电机,终端永磁电机为外定子内转子式的径向励磁永磁电机;中间盘式永磁电机是轴向励磁永磁电机,包括两个圆盘形转子和一个圆弧形定子,两个圆盘形转子的结构相同设置在圆弧形定子的轴向两端,相对于圆弧形定子在轴向上对称,在圆弧形定子侧壁上开有一个开口沿径向朝外的u型缺口,圆弧形定子的两端面上嵌有永磁体,两个圆盘形转子在面对着圆弧形定子的盘面上沿圆周方向均匀开有若干个转子槽,转子槽内嵌放转子绕组;底座永磁电机的一段伸在所述的u型缺口内,中间盘式永磁电机以底座永磁电机的中心轴居中,圆弧形定子与底座永磁电机的转子固定连接,随着底座永磁电机的转子旋转;底座永磁电机、终端永磁电机的中心轴分别与中间盘式永磁电机的中心轴相垂直。
4、所述的运动机器人关节的控制模式采用的第一个技术方案是:首先判断所述的底座永磁电机的转子是否旋转到要求的位置,如果没有,则对所述的底座永磁电机的绕组通电,控制其旋转到要求位置后断电,然后判断所述的中间盘式永磁电机是否旋转到要求位置,如果没有,则对所述的中间盘式永磁电机的定子绕组通电,控制其旋转到要求位置后断电,最后判断所述的终端永磁电机是否旋转到要求位置,如果没有,则对所述的终端永磁电机的绕组通电,依次控制所述的底座永磁电机、中间盘式永磁电和终端永磁电机实现三自由度运动。
5、所述的运动机器人关节的控制模式采用的第二个技术方案是:分别判断所述的底座永磁电机、中间盘式永磁电机和终端永磁电机各自的转子是否旋转到要求的位置,如果没有,则分别对各电机自身的绕组进行通电,控制其旋转到要求位置后断电,并行控制所述的底座永磁电机、中间盘式永磁电机和终端永磁电机实现三自由度运动
6、本发明采用以上技术方案后具有以下技术效果:
7、1.本发明将一个盘式轴向励磁永磁电机与两个传统径向励磁永磁电机紧凑组合在一起作为机器人关节,盘式轴向励磁永磁电机具有结构紧凑、转矩密度高和体积小的优势,而传统径向励磁永磁电机具有结构简单、效率高、功率密度高、可靠性好等优点,使用两种电机组合可以发挥两种电机各自的优势,使得本发明公开的两种实施方案的机器人关节轴向较短,并且三个电机组合使得其结构更加紧凑,空间利用率更大。
8、2.本发明采用三个永磁电机紧凑地组合在一起作为机器人关节,相比于传统的以行星减速机为基础而集成电机、制动器、编码器等部件的结构的机器人关节模组,具有体积小、质量轻的优势。
9、3.本发明采用耦合化设计,各永磁电机单元模块之间的运动相互耦合,能够灵活方便实现三自由度运动输出,可以使整个机械关节的效率得到提升,在较小体积内输出较大的功率。
技术特征:
1.一种紧凑型三自由度运动机器人关节,其特征是:包括依次连接的底座永磁电机、中间盘式永磁电机和终端永磁电机,底座永磁电机为外转子内定子式的径向励磁永磁电机,终端永磁电机为外定子内转子式的径向励磁永磁电机;
2.一种紧凑型三自由度运动机器人关节,其特征是:包括依次连接的底座永磁电机、中间盘式永磁电机和终端永磁电机,底座永磁电机为外转子内定子式的径向励磁永磁电机,终端永磁电机为外定子内转子式的径向励磁永磁电机;
3.根据权利要求1所述的紧凑型三自由度运动机器人关节,其特征是:所述的半圆形定子(9)的直径与底座永磁电机的转子的直径相匹配,中间盘式永磁电机的两个扇形转子(6)的外圆面突出于半圆形定子(9)外圆面之外,终端永磁电机的直径大于半圆形定子(9)的轴向厚度;终端永磁电机的定子的直径小于扇形的转子外圆弧的弧长,终端永磁电机的定子在轴向上不突出于中间盘式永磁电机的扇形转子(6)外部。
4.根据权利要求3所述的紧凑型三自由度运动机器人关节,其特征是:中间盘式永磁电机的扇形转子(6)的扇角小于80°。
5.根据权利要求2所述的紧凑型三自由度运动机器人关节,其特征是:所述的u型缺口(46)的径向深度小于圆弧形定子(31)的外圆至中间盘式永磁电机的转轴外圆之间的径向距离,u型缺口(46)的切向宽度与底座永磁电机的转子的外径相匹配;终端永磁电机的外径大于中间盘式永磁电机的定子(31)的轴向长度,中间盘式永磁电机的圆盘形转子(32)外径大于圆弧形定子(31)的外径,底座永磁电机的外径小于等于中间盘式永磁电机的定子(31)的轴向长度。
6.根据权利要求5所述的紧凑型三自由度运动机器人关节,其特征是:中间盘式永磁电机的永磁体(33)的端面与圆弧形定子(31)的端面平齐。
7.根据权利要求1所述的紧凑型三自由度运动机器人关节,其特征是:终端永磁电机的定子外部套有机壳(20),机壳(20)的轴向两端连接端盖(19),终端永磁电机的定子、机壳(20)和端盖(19)固定成一体,中间盘式永磁电机的扇形转子(6)与终端永磁电机上的端盖(19)通过安装支脚固定连接;底座永磁电机的转子的轴向两端各固定连接一个端盖(18),底座永磁电机的端盖(18)和中间盘式永磁电机的定子之间通过另一个安装支脚固定连接。
8.根据权利要求2所述的紧凑型三自由度运动机器人关节,其特征是:终端永磁电机的定子设在机壳(43)内,机壳(43)的轴向装有端盖(42),终端永磁电机的端盖(42)、机壳(43)以及定子固定连接在一起;中间盘式永磁电机的圆弧形定子(31)固定在中间盘式永磁电机的机壳(40)内,中间盘式永磁电机的机壳(40)的轴向两端装有紧密套在圆盘形转子(32)外部的端盖(41),中间盘式永磁电机的端盖(41)和终端永磁电机的端盖(42)之间通过安装支脚4固定连接。
9.一种权利要求1或2所述的紧凑型三自由度运动机器人关节的控制模式,其特征是:首先判断所述的底座永磁电机的转子是否旋转到要求的位置,如果没有,则对所述的底座永磁电机的绕组通电,控制其旋转到要求位置后断电,然后判断所述的中间盘式永磁电机是否旋转到要求位置,如果没有,则对所述的中间盘式永磁电机的定子绕组通电,控制其旋转到要求位置后断电,最后判断所述的终端永磁电机是否旋转到要求位置,如果没有,则对所述的终端永磁电机的绕组通电,依次控制所述的底座永磁电机、中间盘式永磁电和终端永磁电机实现三自由度运动。
10.一种权利要求1或2所述的紧凑型三自由度运动机器人关节的控制模式,其特征是:分别判断所述的底座永磁电机、中间盘式永磁电机和终端永磁电机各自的转子是否旋转到要求的位置,如果没有,则分别对各电机自身的绕组进行通电,控制其旋转到要求位置后断电,并行控制所述的底座永磁电机、中间盘式永磁电和终端永磁电机实现三自由度运动。
技术总结
本发明公开一种紧凑型三自由度运动机器人关节及其控制模式,包括依次连接的底座永磁电机、中间盘式永磁电机和终端永磁电机,底座永磁电机为外转子内定子式的径向励磁永磁电机,终端永磁电机为外定子内转子式的径向励磁永磁电机,中间盘式永磁电机是轴向励磁永磁电机,中间盘式永磁电机的半圆形定子与底座永磁电机的转子一端面固定连接,终端永磁电机的定子一端面与中间盘式永磁电机的两个扇形转子的外圆面中间共同固定连接;本发明将一个盘式轴向励磁永磁电机与两个传统径向励磁永磁电机紧凑组合在一起作为机器人关节,运动相互耦合,发挥两种电机各自的优势,使得机器人关节轴向较短,结构更加紧凑,能够灵活方便实现三自由度运动输出。
技术研发人员:张新华,陈雨佳,杨刘
受保护的技术使用者:江苏大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!