多机器人巡检机房的方法、门禁控制电路及巡检机器人与流程
本公开涉及互联网和数据中心运维,尤其涉及一种多机器人巡检机房的方法、门禁控制电路及巡检机器人。
背景技术:
1、随着互联网应用的广泛发展,对于服务器的服务性能和稳定性的要求越来越高,存放服务器的机房环境以及对各个服务器状态的日常监测也成为关键的一环。随着机器人技术的发展,一些智能机器人逐步开始应用于执行机房巡检任务。
2、例如,有的巡检机器人集成了多种功能模块,诸如能够采集周围环境(例如温度、湿度等)的传感器、能够进行视频拍摄和分析处理的功能模块、能够进行导航的模块等,通过集成多个功能模块,实现对机房内各个服务器性能的实时监测、及时发现问题并进行提示和运维处理等。
技术实现思路
1、在实现本公开技术构思的过程中,发现相关技术中存在以下技术问题:经常会有跨机房执行巡检任务的需求,在指派多个智能机器人执行多机房的巡检任务时,有些场景下由于机房的防火门位置设置不合理,经常会遇到机房相对设置防火门并且同时开启防火门会造成过道堵塞,影响其他机器人通过的情况,缺乏较为高效率的解决方案。例如有些方案采用机器人之间错峰进行巡检的思路,然而需要对每个机器人执行巡检任务的时间进行预估,通过统筹安排执行先后和间隔时间来达到错时执行,巡检效率低,而且估算准确性较差。
2、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开的实施例提供了一种多机器人巡检机房的方法、门禁控制电路及巡检机器人。
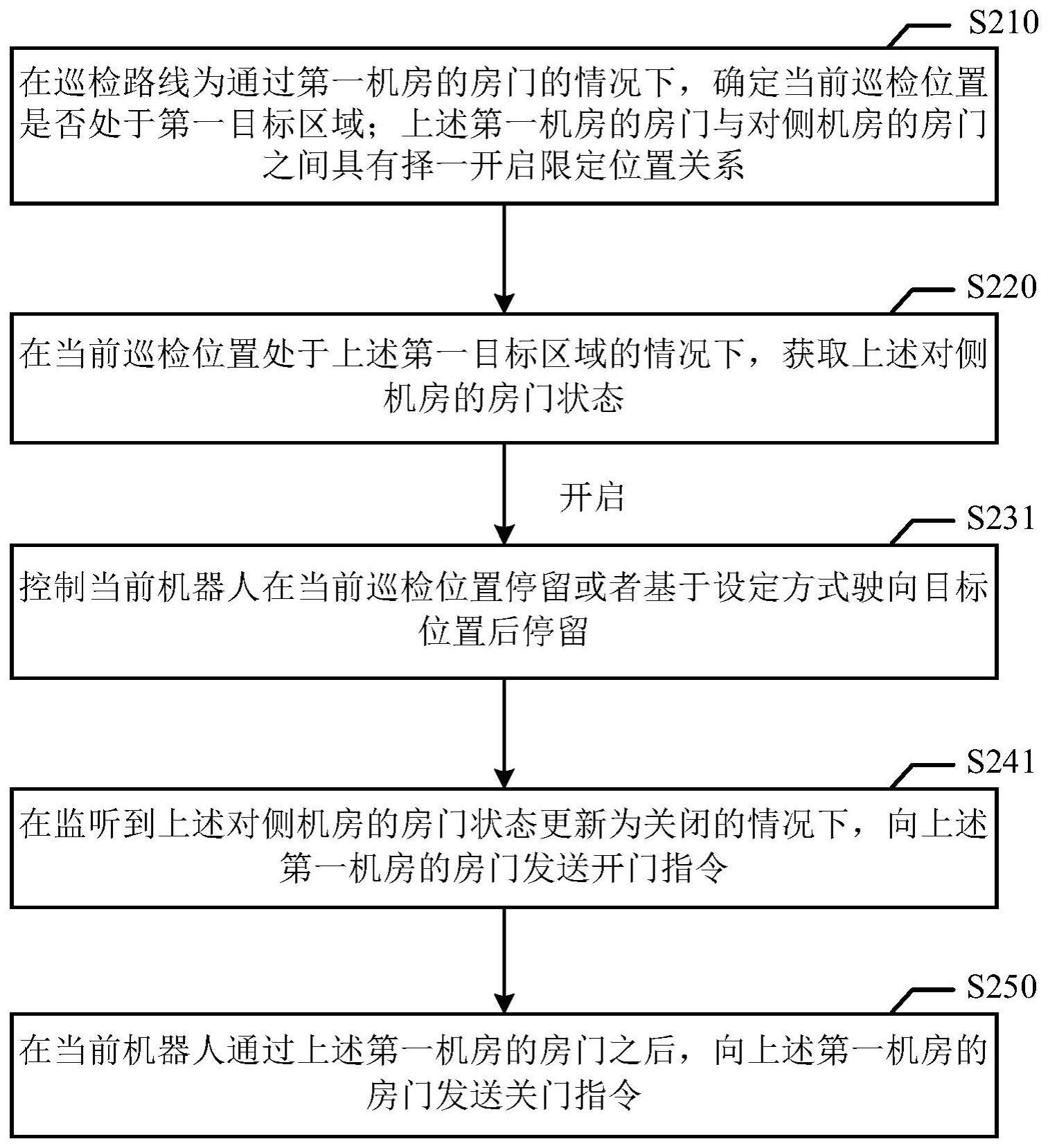
3、第一方面,本公开的实施例提供一种多机器人巡检机房的方法。针对每个机器人,上述方法包括:在巡检路线为通过第一机房的房门的情况下,确定当前巡检位置是否处于第一目标区域;上述第一机房的房门与对侧机房的房门之间具有择一开启限定位置关系;在当前巡检位置处于上述第一目标区域的情况下,获取上述对侧机房的房门状态;在上述对侧机房的房门状态为开启的情况下,控制当前机器人在当前巡检位置停留或者基于设定方式驶向目标位置后停留;并在监听到上述对侧机房的房门状态更新为关闭的情况下,向上述第一机房的房门发送开门指令;在当前机器人通过上述第一机房的房门之后,向上述第一机房的房门发送关门指令。
4、根据本公开的实施例,上述方法还包括:在上述对侧机房的房门状态为关闭的情况下,向上述第一机房的房门发送开门指令。
5、根据本公开的实施例,上述择一开启限定位置关系包括以下至少一种:上述第一机房的房门与对侧机房的房门正对设置且同时处于开展状态会阻塞过道;或者,上述第一机房的房门与对侧机房的房门交错设置且同时处于开展状态会阻塞过道。
6、根据本公开的实施例,上述第一目标区域为距离上述第一机房的房门在第一距离到第二距离之间的空间区域,上述第二距离大于上述第一距离;上述目标位置为上述第一距离对应的位置,或者,上述目标位置距离上述第一机房的房门小于上述第一距离且对上述房门的开启无影响。
7、根据本公开的实施例,在多个机器人对处于择一开启限定位置的同一组房门同时发起多个房门状态查询请求的情况下,获取到的上述对侧机房的房门状态中,包含以下中的至少一种:即时响应的房门状态查询结果、基于延后时长进行延时响应的房门状态查询结果;上述延后时长用于确保对先响应的房门状态查询结果得到开关门控制指令响应后,以更新后的房门状态反馈给经过延后时长延后响应的房门状态查询请求;其中,上述即时响应和上述延时响应是根据不同巡检机器人执行巡检任务的优先级、不同巡检机器人的优先级、不同房门的优先级至少一项进行设置得到。
8、根据本公开的实施例,上述方法还包括:在巡检路线为通过第二机房的房门且当前巡检位置处于第二目标区域的情况下,向上述第二机房的房门发送开门指令;上述第二机房的房门处于开展状态且不会阻塞过道;在当前机器人通过上述第二机房的房门之后,向上述第二机房的房门发送关门指令。
9、根据本公开的实施例,上述第二机房的房门与对侧机房的房门之间具有开启不限定位置关系。上述开启不限定位置关系包括以下至少一种:上述第二机房的房门与对侧机房的房门间隔设置且同时处于开展状态不阻塞过道;或者,上述第二机房的房门与对侧机房的房门正对设置且同时处于开展状态不阻塞过道;或者,上述第二机房的房门与对侧机房的房门交错设置且同时处于开展状态不阻塞过道。
10、根据本公开的实施例,上述巡检路线通过第一机房的房门包括以下至少一种情况:在第一机房内执行完巡检任务,从第一机房的房门穿出后对其他机房进行巡检;或者,在其他机房内执行完巡检任务,从第一机房的房门穿入后对上述第一机房进行巡检;或者,从第一机房的房门穿入后在第一机房内进行充电;或者,在第一机房内执行完巡检任务,从第一机房的房门穿出后进入到其他机房进行充电。
11、第二方面,本公开的实施例提供一种机房门禁控制电路。上述机房门禁控制电路包括:通信模块、编码存储模块、控制模块、开关电路和电动门驱动模块。上述通信模块用于接收巡检机器人发送的针对目标房门的开门指令或关门指令。上述编码存储模块用于存储机房房门对应的身份编码。上述控制模块的两个输入端分别与上述通信模块和上述编码存储模块连接;上述控制模块的输出端与上述开关电路的控制端连接,用于控制上述开关电路的导通或关闭。上述开关电路与上述电动门驱动模块连接;上述电动门驱动模块用于驱动机房的房门在开启状态和关闭状态之间切换。其中,上述控制模块用于:将上述开门指令的目标房门与存储的上述身份编码进行比对;在比对一致的情况下,控制上述开关电路导通,使得上述电动门驱动模块驱动上述目标房门打开;上述控制模块还用于:将上述关门指令的目标房门与存储的上述身份编码进行比对;在比对一致的情况下,控制上述开关电路断开,使得上述电动门驱动模块驱动上述目标房门关闭。
12、根据本公开的一种实施例,上述通信模块还用于接收巡检机器人发送的针对对侧机房的房门状态查询请求;上述房门状态查询请求是由上述巡检机器人在当前巡检位置处于第一机房的第一目标区域的情况下发送的;上述第一机房的房门与对侧机房的房门之间具有择一开启限定位置关系;上述控制模块还用于:向对侧机房的机房门禁控制电路发送房门状态获取请求,接收上述对侧机房的机房门禁控制电路反馈的房门状态;并将上述房门状态发送给上述巡检机器人。
13、根据本公开的另一种实施例,上述机房门禁控制电路还包括:距离感测模块,用于感测巡检机器人距离机房房门的距离;上述控制模块的另一输入端与上述距离感测模块连接;上述控制模块还用于:在感测到上述巡检机器人的当前巡检位置处于第一机房的第一目标区域的情况下,向对侧机房的机房门禁控制电路发送房门状态获取请求,接收上述对侧机房的机房门禁控制电路反馈的房门状态;并将上述房门状态发送给上述巡检机器人。
14、根据本公开的实施例,上述控制模块还用于:对处于择一开启限定位置的同一组房门同时发起的多个房门状态查询请求设置延后时长并进行错峰响应,上述延后时长用于确保对先响应的房门状态查询结果得到开关门控制指令响应后,以更新后的房门状态反馈给经过延后时长延后响应的房门状态查询请求;其中,根据不同巡检机器人执行巡检任务的优先级、不同巡检机器人的优先级、不同房门的优先级至少一项进行错峰响应的设置。
15、第三方面,本公开的实施例提供一种巡检机器人。上述巡检机器人包括:位置确定模块、房门状态获取模块、运动控制模块和门禁控制模块。上述位置确定模块用于在巡检路线为通过第一机房的房门的情况下,确定当前巡检位置是否处于第一目标区域;上述第一机房的房门与对侧机房的房门之间具有择一开启限定位置关系。上述房门状态获取模块用于在当前巡检位置处于上述第一目标区域的情况下,获取上述对侧机房的房门状态。上述运动控制模块用于在上述对侧机房的房门状态为开启的情况下,控制当前机器人在当前巡检位置停留或者基于设定方式驶向目标位置后停留。上述门禁控制模块用于在监听到上述对侧机房的房门状态更新为关闭的情况下,向上述第一机房的房门发送开门指令。上述门禁控制模块还用于在当前机器人通过上述第一机房的房门之后,向上述第一机房的房门发送关门指令。
16、第四方面,本公开的实施例提供了一种电子设备。上述电子设备包括处理器、通信接口、存储器和通信总线,其中,处理器、通信接口和存储器通过通信总线完成相互间的通信;存储器,用于存放计算机程序;处理器,用于执行存储器上所存放的程序时,实现如上所述的多机器人巡检机房的方法。
17、第五方面,本公开的实施例提供了一种计算机可读存储介质。上述计算机可读存储介质上存储有计算机程序,上述计算机程序被处理器执行时实现如上所述的多机器人巡检机房的方法。
18、本公开实施例提供的上述技术方案至少具有如下优点的部分或全部:
19、在多个机器人对多个机房进行跨机房巡检的场景下,针对需要通过第一机房的房门的情况,第一机房的房门与对侧机房的房门之间具有择一开启限定位置关系,通过设置获取对侧机房的房门状态、在对侧机房的房门开启的情况下采取等待其关闭、之后控制第一机房的房门开启的策略,能够在对侧机房有其他机器人进出门的情况下进行等待,避免同时开启第一机房的房门与对侧机房的房门所造成的过道堵塞,同时由于各个机器人无需进行时间错开安排巡检任务,多个机器人可以并行执行巡检任务,有助于提升巡检效率;在遇到可能导致阻塞点位的房门开启时仅需要执行先到先开启、对侧开启后避让等待的策略即可,由于开关门所耗费的时间占据整个巡检任务执行时间的比例很小,对于整体的巡检任务的执行时长影响很小;同时还节约了运维人员估算任务时间以及设置不同机器人之间执行巡检任务的间隔的成本。
- 还没有人留言评论。精彩留言会获得点赞!