一种基于折纸结构的仿乌贼抓取式末端执行器及方法
本发明涉及一种执行器,尤其涉及一种基于折纸结构的仿乌贼抓取式末端执行器及方法。
背景技术:
1、工业机械臂作为数字经济时代的标志性工具,可以代替人完成各种各样的冗杂、困难的工作,并且在实际生产生活中得到广泛应用。随着工业机械臂任务类型的多元化和复杂性的提高,对工业机械臂在非结构化动态环境中的工作能力提出了更高的要求。末端执行器作为工业机械臂中不可或缺的一部分,直接决定了工业机械臂的效率和性能。高性能的末端执行器有利于推动工业机械臂技术的发展,为实现自动化生产和柔性制造提供有力支持。
2、目前,末端执行器通常采用刚性结构进行设计而且其吸盘是相对固定的,该设计方法虽能够有效应对结构化环境问题,但占用空间大,无法满足于缩窄狭长空间内的高速抓取。特别对于非结构化环境下任务需求时,该设计方法往往会导致更加复杂的机械结构、驱动方式、控制系统等,这严重限制了工业机械臂朝着轻量化、柔性化、智能化的方向发展。因此,如何满足非结构化环境中特殊任务需求,提高末端执行器的灵活度、适应性、可靠性是当前工业机械臂现存问题之一。
技术实现思路
1、为了解决上述技术所存在的不足之处,本发明提供了针对上述设计中存在的问题,本发明设计了一种基于折纸结构的仿乌贼抓取式末端执行器及方法。
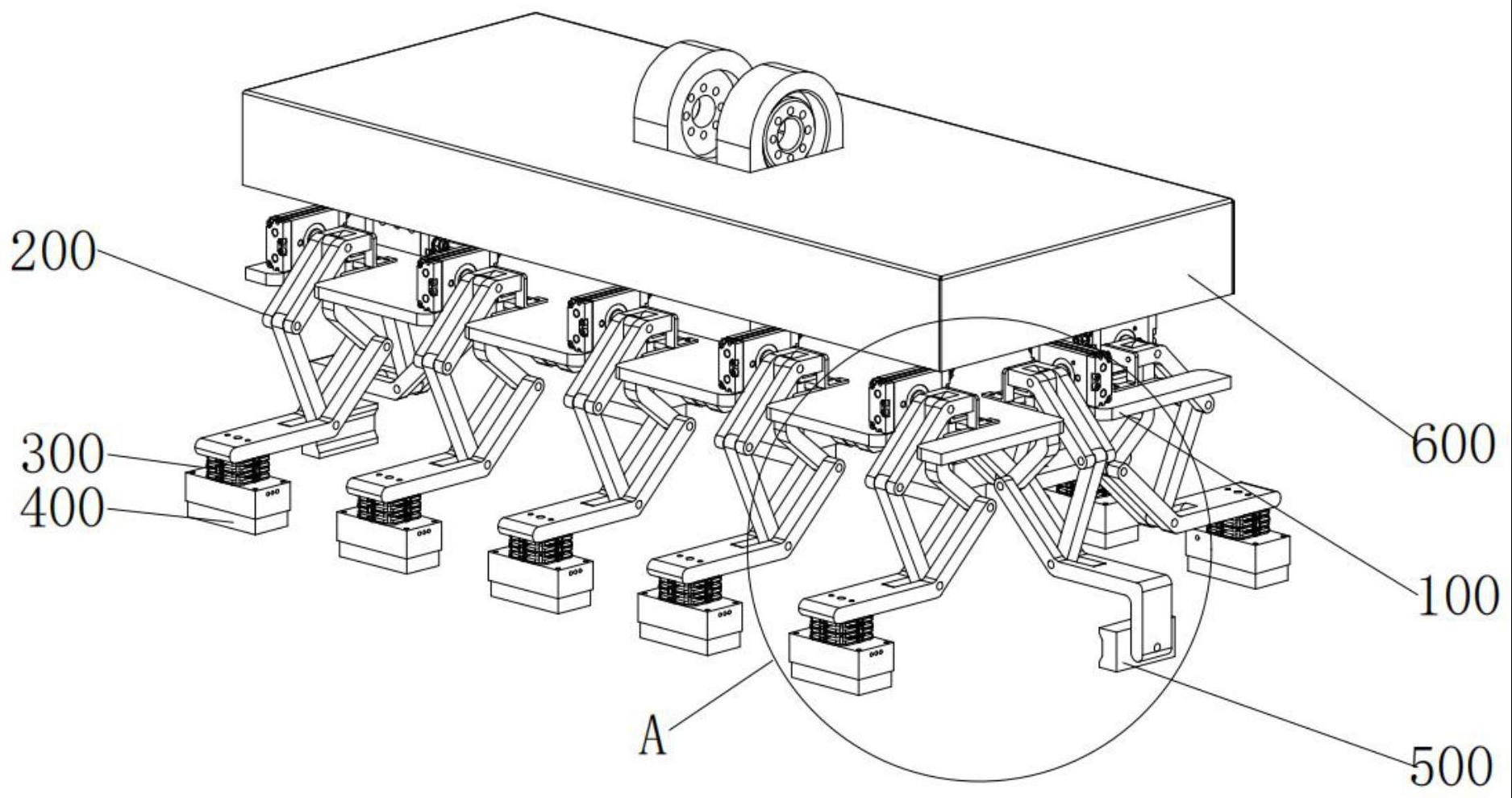
2、为了解决以上技术问题,本发明采用的技术方案是一种基于折纸结构的仿乌贼抓取式末端执行器,包括底座,于底座上连接多个可折展的异型连杆组模块,多个异型连杆组模块在底座上松耦合,异型连杆组模块重复折展于底座的腹部及下方空间;
3、多个异型连杆组模块分为两组,一组中的异型连杆组模块各自通过一具有由柔性外衣和刚性内骨骼组成的可伸缩折纸结构连接一海绵吸盘,另一组中的异型连杆组模块各自连接一夹具。
4、进一步地,异型连杆组模块包括第一连杆和旋转气缸,第一连杆和旋转气缸均固定连接于底座上,第一连杆的上部铰接有第二连杆,第二连杆在与第一连杆的铰接点处被旋转气缸连接驱动,第一连杆的下部铰接有第三连杆,第二连杆、第三连杆均铰接在第四连杆上。
5、进一步地,第一连杆包括一体成型的第一水平杆体和第一倾斜杆体,第一水平杆体沿水平方向设置并通过支架固定连接在底座上,第一倾斜杆体相对于第一水平杆体倾斜向下设置,第一水平杆体和第一倾斜杆体的结合部旋转设有铰接柱,铰接柱连接在旋转气缸上,铰接柱与第二连杆相固定连接。
6、进一步地,第二连杆和第四连杆均弯折设置,第二连杆的两端向远离第三连杆的方向弯折,第四连杆的两端向靠近第三连杆的方向弯折;第四连杆的下端面在折展时始终沿水平方向设置。
7、进一步地,可伸缩折纸结构连接于第四连杆的下端面。
8、进一步地,夹具通过竖向设置的第五连杆连接于第四连杆的下端面。
9、进一步地,可伸缩折纸结构包括至少两个上下平行设置的夹板,位于上方的夹板向下铰接有若干个刚性的上活页,位于下方的夹板向上均铰接有若干个刚性的下活页,上活页和下活页一一对应设置成至少两组,一组上活页和下活页之间连接有柔性的折叠气囊。
10、进一步地,位于上方的夹板向下铰接有上限位连杆,位于下方的夹板向上铰接有下限位连杆,上限位连杆和下限位连杆相铰接。
11、进一步地,折叠气囊包括承受折叠气囊内部压力载荷的内骨骼,内骨骼的外衣由多层柔性复合结构堆叠而成,外衣上开设有进出气孔。
12、基于折纸结构的仿乌贼抓取式末端执行器的抓取方法,抓取方法通过松耦合的异型连杆组模块驱动海绵吸盘和夹具重复折展于底座的腹部及下方空间,海绵吸盘连接在柔性外衣和刚性内骨骼组成的可伸缩折纸结构上,形成形状感知与自适应抓取相结合的仿乌贼抓取动作。
13、本发明公开了一种基于折纸结构的仿乌贼抓取式末端执行器及方法,具有以下好处:
14、一、基于仿生学原理,采用模块化设计思想将末端执行器的每个异型连杆组模块和可伸缩折纸结构设置成独立模块,根据动态环境和工件形状自由驱动各模块之间互相配合,极大提高了末端执行器的灵活度、适应性、可靠性。
15、二、异型连杆组模块和可伸缩折纸结构在末端执行器的腹部形成仿乌贼式的抓取方式,大大的节省的空间以增加活动空间,从而避免了干涉,满足于缩窄狭长空间内的高速抓取以及非结构化环境中特殊任务需求。
16、三、末端执行器的可伸缩折纸结构采用柔性材料和刚性材料设计了异型连杆组模块和可伸缩折纸结构,不仅提高了末端执行器的柔性,还保证了末端执行器结构的刚度。同时可伸缩折纸结构采用气动方式驱动,有利于保证末端执行器的轻量化。
17、四、末端执行器调动相应的异型连杆组模块驱动海绵吸盘抓取工件,调整夹具的夹持力度和伸缩长度,可以适用于需要按照不同的冲压模具形状抓取冲压工件的场景,通过将形状感知与自适应抓取结合起来,可以实现末端执行器对不规则形状的冲压工件的灵活抓取,智能化程度更高。
技术特征:
1.一种基于折纸结构的仿乌贼抓取式末端执行器,其特征在于,包括底座(100),于底座(100)上连接多个可折展的异型连杆组模块(200),多个异型连杆组模块(200)在底座(100)上松耦合,异型连杆组模块(200)重复折展于底座(100)的腹部及下方空间;
2.根据权利要求1所述的基于折纸结构的仿乌贼抓取式末端执行器,其特征在于:所述异型连杆组模块(200)包括第一连杆(210)和旋转气缸(250),第一连杆(210)和旋转气缸(250)均固定连接于底座(100)上,第一连杆(210)的上部铰接有第二连杆(220),第二连杆(220)在与第一连杆(210)的铰接点处被旋转气缸(250)连接驱动,第一连杆(210)的下部铰接有第三连杆(230),第二连杆(220)、第三连杆(230)均铰接在第四连杆(240)上。
3.根据权利要求2所述的基于折纸结构的仿乌贼抓取式末端执行器,其特征在于:所述第一连杆(210)包括一体成型的第一水平杆体(211)和第一倾斜杆体(212),所述第一水平杆体(211)沿水平方向设置并通过支架(260)固定连接在底座(100)上,所述第一倾斜杆体(212)相对于第一水平杆体(211)倾斜向下设置,第一水平杆体(211)和第一倾斜杆体(212)的结合部旋转设有铰接柱(270),铰接柱(270)连接在旋转气缸(250)上,铰接柱(270)与第二连杆(220)相固定连接。
4.根据权利要求2所述的基于折纸结构的仿乌贼抓取式末端执行器,其特征在于:所述第二连杆(220)和第四连杆(240)均弯折设置,第二连杆(220)的两端向远离第三连杆(230)的方向弯折,第四连杆(240)的两端向靠近第三连杆(230)的方向弯折;所述第四连杆(240)的下端面在折展时始终沿水平方向设置。
5.根据权利要求4所述的基于折纸结构的仿乌贼抓取式末端执行器,其特征在于:所述可伸缩折纸结构(300)连接于第四连杆(240)的下端面。
6.根据权利要求4所述的基于折纸结构的仿乌贼抓取式末端执行器,其特征在于:所述夹具(500)通过竖向设置的第五连杆(280)连接于第四连杆(240)的下端面。
7.根据权利要求1所述的基于折纸结构的仿乌贼抓取式末端执行器,其特征在于:所述可伸缩折纸结构(300)包括至少两个上下平行设置的夹板(310),位于上方的夹板(310)向下铰接有若干个刚性的上活页(320),位于下方的夹板(310)向上均铰接有若干个刚性的下活页(330),上活页(320)和下活页(330)一一对应设置成至少两组,一组上活页(320)和下活页(330)之间连接有柔性的折叠气囊(340)。
8.根据权利要求7所述的基于折纸结构的仿乌贼抓取式末端执行器,其特征在于:位于上方的夹板(310)向下铰接有上限位连杆(350),位于下方的夹板(310)向上铰接有下限位连杆(360),上限位连杆(350)和下限位连杆(360)相铰接。
9.根据权利要求7所述的基于折纸结构的仿乌贼抓取式末端执行器,其特征在于:所述折叠气囊(340)包括承受折叠气囊内部压力载荷的内骨骼(341),内骨骼(341)的外衣(342)由多层柔性复合结构堆叠而成,外衣(342)上开设有进出气孔(343)。
10.一种根据权利要求1-9任一项所述的基于折纸结构的仿乌贼抓取式末端执行器的抓取方法,其特征在于:所述抓取方法通过松耦合的异型连杆组模块(200)驱动海绵吸盘(400)和夹具(500)重复折展于底座(100)的腹部及下方空间,海绵吸盘(400)连接在柔性外衣和刚性内骨骼组成的可伸缩折纸结构(300)上,形成形状感知与自适应抓取相结合的仿乌贼抓取动作。
技术总结
本发明公开了一种基于折纸结构的仿乌贼抓取式末端执行器及方法,于底座上连接多个可折展的异型连杆组模块,形成松耦合,异型连杆组模块重复折展于底座的腹部及下方空间;多个异型连杆组模块分为两组,一组中的异型连杆组模块各自通过一具有由柔性外衣和刚性内骨骼组成的可伸缩折纸结构连接一海绵吸盘,另一组中的异型连杆组模块各自连接一夹具。本发明采用柔性材料和刚性材料设计了异型连杆组结构和可伸缩折纸结构,提高了柔性又保证了结构的刚度。采用气动方式驱动利于保证轻量化,基于仿生学原理,采用模块化设计思想,根据动态环境和工件形状自由驱动各模块之间互相配合,极大提高了末端执行器的灵活度、适应性、可靠性。
技术研发人员:于鲁川,周顺情,章星雨,柴文浩,谢嘉祥,黄沈权,何春光
受保护的技术使用者:温州大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!