一种用于晶圆传输机器人的控制方法及系统与流程
本发明涉及晶圆传输机器人,具体为一种用于晶圆传输机器人的控制方法及系统。
背景技术:
1、当前,众多半导体企业发展势头良好,晶圆制造领域更是全球科技竞争的焦点。
2、ic产品的制造离不开自动搬运机器人,它可以在各种不同的工序间将晶圆进行搬运流转,可以在短期内提高晶圆搬运的效率性和准确性要求,晶圆传输过程中对环境要求十分苛刻,由于晶圆上的微细结构和电路的特性,机器人控制系统必须能够准确地定位和处理晶圆,以避免任何损坏或污染,晶圆传输通常在洁净室环境中进行,以应对洁净室的特殊环境条件,然而,机器人与晶圆接触时可能产生的静电可以吸引周围的粉尘和微小杂质,使其附着在晶圆表面,从而导致晶圆表面的污染,晶圆的污染可能会影响晶圆上的微细结构和电路性能,降低晶圆制造的质量和产量。当前,在晶圆传输机器人领域,很少有方法顾及到机器人接触晶圆时的静电风险问题,且传感器较为单一,监测的数据较为片面。
3、例如,申请公开号为cn115157227a的中国专利公开了一种洁净环境用晶圆传输机器人,通过电动推杆将底部连接板推出至底部滑板的下方,使折叠网兜展开平铺在底部滑板的正下方,底部滑板上吸附的晶圆在传输过程中掉落时,下方的折叠网兜对掉落的晶圆进行接住,以避免负压气泵吸附力度不够导致吸附的晶圆在传输过程中掉落地面损失。
4、又如在申请公开号为cn116352760a的中国专利中公开了晶圆机器人的机械性能诊断方法、装置、终端、介质及晶圆机器人,通过获取晶圆机器人的各运动机械机构在正常搬运工作中单独运行时由其各自内部对应筛选设置的振动采集装置所采集的振动数据,分别对各运动机械机构进行机械性能诊断分析,利用先进的算法进行故障诊断和设备健康状态监测,以确保晶圆机器人的运行可靠性和精度。
5、但以上方法没有考虑到传输过程中晶圆与机器人的摩擦、环境湿度较低、以及设备间的电荷传递导致的电荷分离难以释放等问题,造成晶圆污染、增加碰撞风险干扰定位,且面临传感器较为单一,系统对不同类型静电事件的鉴别能力较弱的问题,这时就需要一种引入多模传感器以及静电消散设计的晶圆传输机器人控制系统。
技术实现思路
1、本发明的目的在于提供一种用于晶圆传输机器人的控制方法及系统,以解决上述背景技术中提出的现有的晶圆与机器人的摩擦产生电荷分离难以释放以及传感器类型单一的问题。
2、为实现上述目的,本发明提供如下技术方案:一种用于晶圆传输机器人的控制方法,包括:
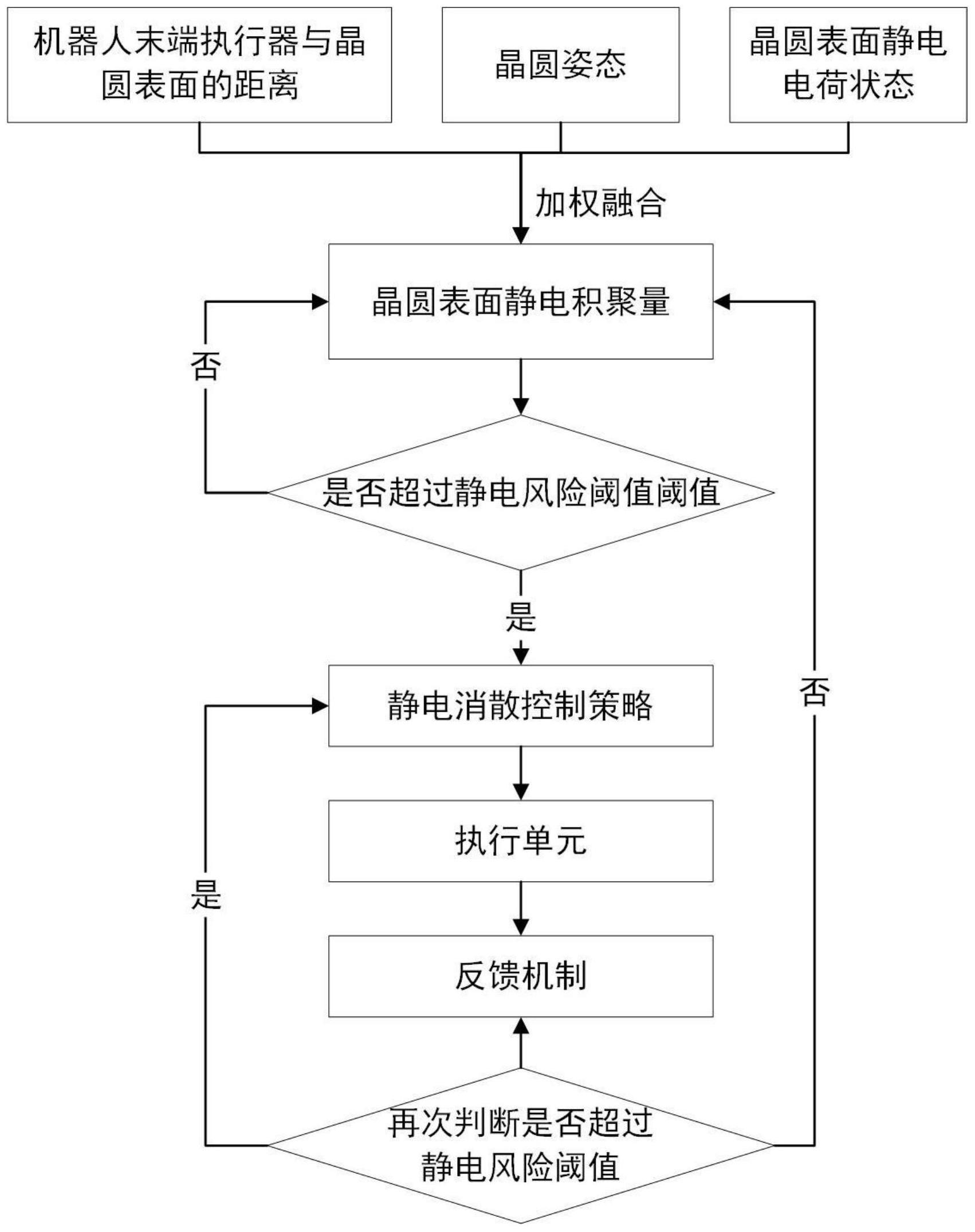
3、s1、获取机器人末端执行器与晶圆表面的距离、晶圆姿态和晶圆表面静电电荷状态,并对晶圆距离、姿态和静电电荷状态进行预处理后加权融合,得到晶圆表面静电积聚量ρ_processed;
4、s2、设定静电风险阈值,当检测到所述静电积聚量ρ_processed小于等于设定静电风险阈值时,则无静电聚集风险,当检测到所述静电积聚量ρ_processed大于设定静电风险阈值时,则进行s3;
5、s3、将所述静电积聚量ρ_processed作为输入数据代入静电消散控制策略,由所述静电消散控制策略规划机器人运动轨迹和动作序列,并将规划数据发送给执行器,执行器生成指令代码发送给伺服驱动器,由反馈机制实时监测控制消散效果,当反馈结果大于静电风险阈值时,再次触发静电消散控制策略,直至反馈结果小于等于静电风险阈值。
6、本发明进一步的改进在于,所述s1的步骤包括:
7、s11、从激光测距传感器获取机器人末端执行器与晶圆表面的距离的电流信号l_laser,从视觉传感器通过轮廓检测方法获取晶圆的姿态信息的电流信号l_vision,从静电传感器通过测量晶圆表面的静电电荷密度获取晶圆表面静电电荷状态的电流信号l_static;
8、s12、所述预处理步骤在设置的多通道信号调理单元运行,传感器获取的电流信号l_laser、l_vision和l_static进行放大和滤波,再通过设置的数模转换子单元得到晶圆位置数字信号ma_laser、晶圆姿态数字信号ma_vision和晶圆表面静电电荷数字信号ma_static;
9、s13、将步骤s12中得到的ma_laser、ma_vision和ma_static利用卡尔曼滤波来计算加权融合后的晶圆表面静电积聚量d_fusion,经去噪处理后得到更准确的静电积聚量ρ_processed输出到s2。
10、本发明进一步的改进在于,所述多通道信号调理单元执行预处理步骤的过程进一步包括:
11、s121、在s11中获取的电流信号l_laser、l_vision和l_static经过前置的晶圆静电信号跨阻放大器转化为晶圆位置电压信号u_laser、晶圆姿态电压信号u_vision和晶圆表面静电电荷电压信号u_static,并在此阶段进行初步放大,随后,电压信号u_laser、u_vision和u_static经过晶圆静电信号二级比例放大器进行进一步放大;
12、s122、将放大后的电压信号u_laser、u_vision和u_static输入到sallen-key低通滤波电路中,再通过数模转换子单元将滤波后的电压信号转化为数字信号ma_laser、ma_vision和ma_static,输入到加权融合策略中。
13、本发明进一步的改进在于,所述加权融合策略的步骤包括:
14、s131、将将所述晶圆位置数字信号ma_laser、晶圆姿态数字信号ma_vision和晶圆表面静电电荷数字信号ma_static进行归一化处理,得到归一化后的位置、姿态和静电电荷状态:normalized_d_laser、normalized_d_vision和normalized_d_static;
15、s132、使用卡尔曼滤波更新状态估计x_hat_k来自动调整权重,计算加权融合后的晶圆表面静电积聚量d_fusion:
16、d_fusion=w_laster×x_hat_las ter+w_vision×x_hat_vis ion+w_static×x_hat_sta tic;
17、其中w_laster、w_vision和w_static分别表示激光测距传感器、视觉传感器和静电传感器各自的权重,x_hat_laster、x_hat_vision和x_hat_static分别表示位置、姿态和静电电荷状态各自的卡尔曼滤波更新状态估计值;
18、s133、加权融合后的晶圆表面静电积聚量d_fusion经降噪处理得到去噪后的静电积聚量ρ_processed,作为s2的输入。
19、本发明进一步的改进在于,所述卡尔曼滤波更新状态估计x_hat_k计算公式为:
20、x_hat_k=x_hat_k'+k_k×y_k;
21、x_hat_k表示x_hat_laster、x_hat_vision和x_hat_static的集合,x_hat_laster、x_hat_vision和x_hat_static分别表示位置、姿态和静电电荷状态的卡尔曼滤波更新状态估计,其中,x_hat_k'表示时间步k时刻晶圆表面的位置、姿态和静电电荷的先验状态估计,y_k表示晶圆表面的位置、姿态和静电电荷测量残差,k_k表示卡尔曼增益,由k_k=p_k'×ht×s_k-1计算得到,h表示所求晶圆表面的位置、姿态和静电电荷的观测矩阵,p_k'表示晶圆表面的位置、姿态和静电电荷先验协方差估计,s_k表示残差的协方差,得到加权融合后的晶圆表面静电积聚量d_fusion的输入参数。
22、本发明进一步的改进在于,所述s3步骤包括以下内容:
23、s31、将所述静电积聚量ρ_processed作为输入数据代入静电消散控制策略规划的机器人运动轨迹和动作序列,所述静电消散控制策略采用基于bp神经网络的pid控制方法,包括bp神经网络部分和晶圆位姿控制部分,计算得到晶圆位姿控制器的输出unn(k);
24、s32、将pid控制算法计算得到的晶圆位姿控制量转换成机器人执行器的控制指令发送给执行器,执行器生成指令代码发送给伺服驱动器,调整机器人姿态;
25、s33、所述伺服驱动器在执行指令后,通过所述反馈机制进行循环控制,循环中不断更新传感器数据、重新计算pid控制量,并将新的晶圆位姿控制指令发送给执行器。
26、本发明进一步的改进在于,所述bp神经网络部分包括:
27、s311、设定bp神经网络的输入变量为xp、xi和xd,xp=e(k),xi=e(k)-2·e(k-1)+e(k-2),xd=e(k)-e(k-1),定义晶圆位姿控制器的期望静电积聚量ρ_desire,e(k)表示所述晶圆位姿控制器的期望静电积聚量ρ_desire与实际静电积聚量ρ_processed之间的误差,e(k)=ρ_processed-ρ_desire;
28、s312、将bp神经网络输出层节点设置为三个,分别对应pid的三个参数:比例系数积分系数和微分系数作为bp神经网络输出层的输出节点联合晶圆位姿控制器控制输出规律实现对晶圆位置姿态的控制,隐含层使用elu函数激活,输出层使用tanh激活函数,其中,wpj(k)、wij(k)和wpj(k)分别表示比例系数、积分系数和微分系数的突触权值,wjp、wji和wjd分别表示三个参数的隐含层偏置。
29、本发明进一步的改进在于,所述晶圆位姿控制器控制输出规律包括积分项inn(k)=inn(k-1)+ki·e(k)·ts,比例项pnn(k)=kp·e(k),微分项dnn(k)=kd·e(k)-e(k-1)/ts,其中,ts表示晶圆位姿控制器的采样周期,基于bp神经网络计算得出的晶圆位姿控制器的输出unn(k)为:
30、unn(k)=pnn(k)+inn(k)+dnn(k)。
31、本发明进一步改进在于,所述晶圆位姿控制器的输出unn(k)转化成输出信号集合uout,输出信号集合uout包含位置和姿态校正指令,依据卡尔曼滤波反向更新权重,将输出信号集合uout进行权重分配,得到位置调整参数ch_laster和姿态调整参数ch_vision,ch_laster表示位置调整的距离,ch_vision表示姿态调整的位置,将位置调整参数ch_laster和姿态调整参数ch_vision转换成机器人执行器的控制指令发送给执行器,执行器生成指令代码发送给伺服驱动器,调整机器人姿态。
32、另一方面,本发明提供一种用于晶圆传输机器人的控制系统,包括:
33、识别传感模块,获取机器人末端执行器与晶圆表面的距离、晶圆姿态和晶圆表面静电电荷状态,并对晶圆距离、姿态和静电电荷状态进行预处理后加权融合,得到晶圆表面静电积聚量ρ_processed;
34、阈值判定模块,用于静电检测策略运行,设定静电风险阈值,当检测到所述静电积聚量ρ_processed小于等于设定静电风险阈值时,则无静电聚集风险,当检测到所述静电积聚量ρ_processed大于设定静电风险阈值时,则运行控制算法模块;
35、控制算法模块,将所述静电积聚量ρ_processed作为输入数据代入静电消散控制策略,所述静电消散控制策略规划机器人运动轨迹和动作序列,并将规划数据发送给执行器,执行器生成指令代码发送给伺服驱动器,由反馈机制实时监测控制消散效果,当反馈结果大于静电风险阈值时,再次触发静电消散控制策略,直至反馈结果小于等于静电风险阈值,实现晶圆传输机器人的智能控制;
36、中央处理模块,负责整体控制系统的计算和决策,执行识别传感模块、阈值判定模块和控制算法模块;
37、人机交互模块,提供给操作人员的界面,用于设定目标位置、监测机器人状态和任务进度;
38、通信模块,用于实现控制系统与其他子系统或网络的通信。
39、本发明进一步的改进在于,所述识别传感模块包括数据获取单元、多通道信号调理单元和信号融合单元;
40、数据获取单元包括通过传感器获取电流信号;
41、多通道信号调理单元包括电流信号的放大、滤波和转换;
42、信号融合单元包括信号的归一化处理和融合权重的自适应。
43、本发明进一步的改进在于,所述控制算法模块包括pid控制单元、执行单元和反馈单元;
44、本发明进一步的改进在于,所述阈值判定模块和控制算法模块中,阈值和期望静电积聚量ρ_desire的大小由操作者依据需求自行设定。
45、与现有技术相比,本发明的有益效果是:
46、1、本发明首先搭载三种传感器,通过加权融合获取更为准确的晶圆表面静电积聚量,实现了融合权重的自适应,通过风险阈值的设定,判断静电聚集风险,多模传感器的引入可以提高静电检测单元的准确性,消除减小个别传感器的误差的同时增强鲁棒性,增加系统对不同类型静电事件的鉴别能力。
47、2、当静电积聚量大于设定静电风险阈值时,触发静电消散控制策略,通过基于bp神经网络的pid控制方法将规划的机器人运动轨迹和动作序列数据发送给执行器,执行器生成指令代码发送给伺服驱动器,由反馈机制实时监测控制消散效果,当反馈结果大于静电风险阈值时,再次触发静电消散控制策略,直至反馈结果小于等于静电风险阈值,解决了在晶圆传输过程中机器人接触晶圆时的静电风险问题,减少了晶圆传输的损耗风险。
- 还没有人留言评论。精彩留言会获得点赞!