一种外骨骼绑缚装置
本公开的实施例属于外骨骼绑缚,具体涉及一种外骨骼绑缚装置。
背景技术:
1、外骨骼装置在康复医学和辅助设备领域已广泛应用,它们通过辅助人体运动来帮助患者恢复运动功能或增强人体工作能力。
2、然而,现有的外骨骼装置在动作过程中以及更换使用者或使用者衣着、体态发生改变时不能及时得到准确的质心矢量和转动惯量矩阵信息,导致外骨骼动力学模型的精确性和实时性不足,不能实现一机多人或一人多态控制。因此,在传统绑缚所装配到的有源外骨骼装置当中,需要通过三维建模软件导出人体的质心矢量和转动惯量矩阵数据然后再导入到外骨骼控制算法当中之后,外骨骼装置才能正常使用。
3、如何解决上述问题成为本领域技术人员亟待解决的技术问题。
技术实现思路
1、本公开的实施例旨在至少解决现有技术中存在的技术问题之一,提供一种外骨骼绑缚装置。
2、本公开的实施例的第一个方面,提供一种外骨骼绑缚装置,包括:
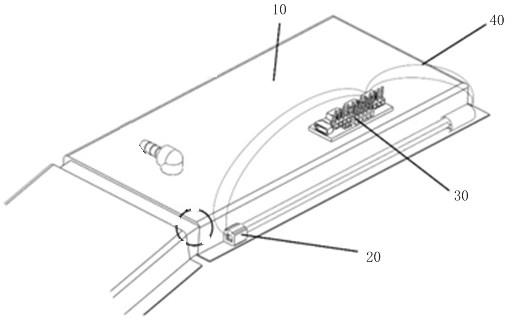
3、变刚度绑缚带,用于绑缚佩戴主体的外骨骼部位;
4、光波导弯曲传感模块,设置于所述变刚度绑缚带;所述光波导弯曲传感模块,用于根据所述变刚度绑缚带绑缚时产生的光强变化信号输出相应的检测电信号;
5、计算模块,用于基于所述检测电信号和所述外骨骼部位的参数,计算得到所述佩戴主体的质心坐标和转动惯量。
6、可选的,所述计算模块,具体还用于:
7、基于所述检测电信号和预设的标准电信号与标准半径之间的对应关系,计算得到所述检测电信号对应的检测半径;
8、根据所述检测半径、所述外骨骼部位的肌肉密度和外骨骼长度,计算得到所述佩戴主体的所述质心坐标和所述转动惯量。
9、可选的,所述光波导弯曲传感模块包括光源组件、光波导和光强接收装置;
10、所述光源组件和所述光强接收装置均设置于所述变刚度绑腹带;所述光波导固接于所述变刚度绑腹带,且所述光波导一端与所述光源组件连接,另一端与所述光强接收装置连接;
11、其中,所述电信号包括电压;绑缚过程中,所述光强接收装置接收所述光波导内传播的光并测量光强变化信号,以获取外骨骼部位的电压值。
12、可选的,所述光源组件包括固定座和光源;所述光源包括红色光源;
13、所述固定座固定于所述变刚度绑腹带;所述光源设于所述固定座内;
14、其中,所述光波导一端连接于所述固定座,并与所述光源的位置相对应;所述光源用于传播所述光源的光。
15、可选的,所述光强接收装置包括安装座和光探测件;
16、所述安装座固定于所述变刚度绑腹带;所述光探测件设于所述安装座内;
17、其中,所述光波导另一端连接于所述安装座,并与所述光探测件的位置相对应;所述光探测件用于测量所述光波导内的光强变化信号,以获取外骨骼部位的电压值。
18、可选的,所述光波导包括套管和设置于所述套管内的弹性体芯;所述套管一端与所述光源组件连接,另一端与所述光强接收装置连接。
19、可选的,所述光波导弯曲传感模块还包括限位件,所述限位件固定于所述光源组件和所述光强接收装置之间;其中,绑缚过程中,所述限位件与所述光波导抵接,以防止光波导向非测量方向弯曲。
20、可选的,标准电信号与模拟圆柱式外骨骼部位标准半径之间的关系满足如下条件式:y=a+bx,式中,x为半径,y为电压值,其中,a为截距,b为斜率,且a的取值范围为3547.11296 ± 3.8242,b的取值范围为-37.43363 ± 0.87293。
21、可选的,利用如下公式计算质心坐标:
22、式1,
23、;
24、式1中,质心的坐标为cm,其中 (x, y, z) 表示质心在三维笛卡尔坐标系中的坐标,h是模拟圆柱式外骨骼部位的高度,模拟圆柱式外骨骼部位的底面呈圆形,在水平方向上质心于圆心,即坐标 x 和坐标 y 的坐标值为半径r,在垂直方向上,质心位于模拟圆柱式外骨骼部位的中点,即坐标z 的坐标值为高度h的一半。
25、可选的,利用如下公式计算转动惯量:
26、式2,
27、;
28、式3,
29、;
30、式4
31、;
32、其中,m为是模拟圆柱式外骨骼部位的质量,r为外骨骼部位半径r,h是模拟圆柱式外骨骼部位的高度,是模拟圆柱式外骨骼部位平行于轴的转动惯量,是模拟圆柱式外骨骼部位垂直于轴的转动惯量,为模拟圆柱式外骨骼部位的转动惯量。
33、本公开的实施例的有益效果,包括:本公开中,利用可弯曲传感模块与变刚度绑带的同步形变,可以检测外骨骼部位的电压值,并计算用户的质心坐标和/或转动惯量,并根据质心坐标和/或转动惯量对动力学模型进行迭代优化,从而提高了外骨骼的动力学模型的精确性和控制效率。
技术特征:
1.一种外骨骼绑缚装置,其特征在于,包括:
2.根据权利要求1所述的外骨骼绑缚装置,其特征在于,所述计算模块,具体还用于:
3.根据权利要求1所述的外骨骼绑缚装置,其特征在于,所述光波导弯曲传感模块包括光源组件、光波导和光强接收装置;
4.根据权利要求3所述的外骨骼绑缚装置,其特征在于,
5.根据权利要求3所述的外骨骼绑缚装置,其特征在于,
6.根据权利要求3所述的外骨骼绑缚装置,其特征在于,
7.根据权利要求3所述的外骨骼绑缚装置,其特征在于,所述光波导弯曲传感模块还包括限位件,所述限位件固定于所述光源组件和所述光强接收装置之间;其中,绑缚过程中,所述限位件与所述光波导抵接,以防止光波导向非测量方向弯曲。
8.根据权利要求2所述的外骨骼绑缚装置,其特征在于,
9.根据权利要求1所述的外骨骼绑缚装置,其特征在于,
10.根据权利要求1所述的外骨骼绑缚装置,其特征在于,
技术总结
本公开的实施例提供一种外骨骼绑缚装置,包括:变刚度绑缚带,用于绑缚佩戴主体的外骨骼部位;光波导弯曲传感模块,设置于所述变刚度绑缚带;所述光波导弯曲传感模块,用于根据所述变刚度绑缚带绑缚时产生的光强变化信号输出相应的检测电信号;计算模块,用于基于所述检测电信号和所述外骨骼部位的参数,计算得到所述佩戴主体的质心坐标和转动惯量。本公开中,利用光波导弯曲传感模块与变刚度绑带的同步形变,可以检测外骨骼部位的电信号,并基于检测电信号和外骨骼部位的参数计算用户的质心坐标和/或转动惯量,从而为动力学模型的迭代优化提供了数据支持,以提高外骨骼的动力学模型的精确性和控制效率。
技术研发人员:朱培逸,温嘉懿,颜健,徐阳,沈钲敖,阮昕玥,刘成成,李鑫,刘柱,鲁明丽
受保护的技术使用者:常熟理工学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!