一种机器人的快速转接头的制作方法
本发明涉及机器人转接头,具体为一种机器人的快速转接头。
背景技术:
1、现今机器人末端执行器与机械手臂的固定多采用螺钉连接,由于该连接方式的限制,末端执行器的拆装方式繁琐,耗时长。且多种末端执行器的连接端面不同,需要实现不同执行器与机械手臂的通用型连接。
技术实现思路
1、本发明所解决的技术问题在于提供一种机器人的快速转接头,以解决上述背景技术中提出的问题。
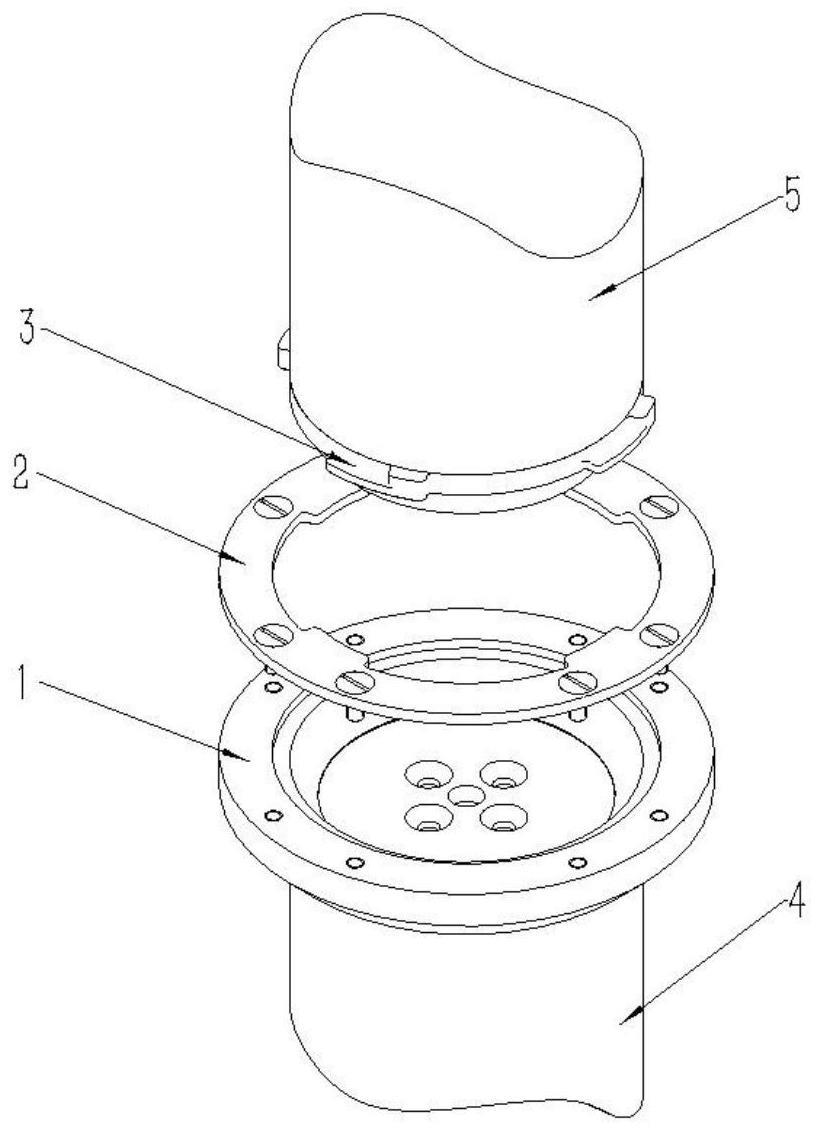
2、本发明所解决的技术问题采用以下技术方案来实现:一种机器人的快速转接头,包括一号转接板,所述的一号转接板上端设置有盖板,所述的盖板上端设置有二号转接板,所述的二号转接板的上端设置有末端执行器,所述的一号转接板的下端设置有机械手臂。
3、进一步的,所述一号转接板通过螺栓盖板固定连接。
4、进一步的,所述盖板内侧有挡板,所述的挡板之间形成滑块槽。
5、进一步的,所述的一号转接板背部与机器人手臂端面固定连接。
6、进一步的,所述的二号转接板背部与末端执行器端面固定连接。
7、进一步的,所述二号转接板外侧有滑块,所述二号转接板外侧滑块在滑块槽内转动,所述的滑块与盖板内侧挡板扣合。
8、与现有技术相比,本发明的有益效果是:本发明的结构紧凑,连接可靠,能实现快速拆装,通用于多种末端执行器的机器人的快速转接头。
技术特征:
1.一种机器人的快速转接头,其特征在于:包括一号转接板(1),所述的一号转接板(1)上端设置有盖板(2),所述的盖板(2)上端设置有二号转接板(3),所述的二号转接板(3)的上端设置有末端执行器(5),所述的一号转接板(1)的下端设置有机械手臂(4)。
2.如权利要求1所述的一种机器人的快速转接头,其特征在于:所述一号转接板(1)通过螺栓盖板(2)固定连接。
3.如权利要求2所述的一种机器人的快速转接头,其特征在于:所述盖板(2)内侧有挡板,所述的挡板之间形成滑块槽。
4.如权利要求1所述的一种机器人的快速转接头,其特征在于:所述的一号转接板(1)背部与机器人手臂(4)端面固定连接。
5.如权利要求1所述的一种机器人的快速转接头,其特征在于:所述的二号转接板(3)背部与末端执行器(5)端面固定连接。
6.如权利要求1所述的一种机器人的快速转接头,其特征在于:所述二号转接板(3)外侧有滑块,所述二号转接板(3)外侧滑块在滑块槽内转动,所述的滑块与盖板(2)内侧挡板扣合。
技术总结
本发明提供一种机器人的快速转接头,包括一号转接板,所述的一号转接板上端设置有盖板,所述的盖板上端设置有二号转接板,所述的二号转接板的上端设置有末端执行器,所述的一号转接板的下端设置有机械手臂,本发明的结构紧凑,连接可靠,能实现快速拆装,通用于多种末端执行器的机器人的快速转接头。
技术研发人员:毛惟谦,田原
受保护的技术使用者:上海哲谦应用科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!