一种垃圾智能分拣机器人的制作方法
本申请涉及垃圾分拣,尤其涉及一种垃圾智能分拣机器人。
背景技术:
1、垃圾分拣机器人是一种自动化设备,旨在帮助处理和分拣垃圾,它的工作使通过位于顶端的传感器进行感知和识别,在传感器捕捉垃圾的图像和特征之后,机器人将数据传输到计算机系统中进行处理和分析,通过计算机系统的算法和图像识别对垃圾进行分类和识别,帮助机器人辨别出可回收物、有害垃圾、湿垃圾等不同类型的垃圾,一旦垃圾被识别和分类,机器人会使用机械臂、传送带或其他机械设备来将垃圾分拣到相应的容器或处理区域,垃圾分拣机器人在多组垃圾筒组之间移动,分拣完一组垃圾筒组后,移动到另一组垃圾筒组前继续进行分拣。
2、当垃圾分拣机器人工作的过程中,机械臂带动的夹具会直接接触垃圾的外侧,导致垃圾表面的污染会接触到夹具的夹持面,导致夹具表面脏污;且夹具表面湿润脏污时,质轻的垃圾会直接粘附在夹具的表面,影响后续的垃圾分拣过程,降低垃圾分拣的效率。
技术实现思路
1、本申请提出了一种垃圾智能分拣机器人,具备对夹具进行及时清洁的优点,用以解决上述背景技术中提出的夹具被污染的问题。
2、为达到上述目的,本申请采用如下技术方案:一种垃圾智能分拣机器人,包括垃圾桶组,所述垃圾桶组的顶端设有盛料盒,所述垃圾桶组的前方有机器人体,所述机器人体的外侧有带动夹具移动夹取垃圾的机械臂,所述机械臂的外侧通过伸缩杆连接有位于夹具周向的清洗组件,所述清洗组件包括固定框,且固定框的内侧连接有分为两组的四个刮板,两组所述刮板相互靠近的侧面连接有复位弹簧,且复位弹簧远离刮板的端部与固定框的中部连接,所述刮板的外侧设有弹性带,且弹性带周向位于两组最边缘的两个刮板外侧,弹性拉动刮板相互靠近,所述夹具的两侧面呈圆弧面,随着夹具的打开,夹具的两夹板靠近机械臂的端部横向间距最短,令固定框因弹性带的弹性逐渐向机械臂的端部靠近,而随着夹具的关闭且夹具的两夹板还未相互接触时,夹具的两夹板远离机械臂的端部横向间距最短,固定框因弹性带的弹性逐渐向远离机械臂的方向移动。
3、进一步,每组所述刮板相互接触的侧面顶边被倒斜角,且每组刮板相互接触的面分别与夹具的两个夹板接触。
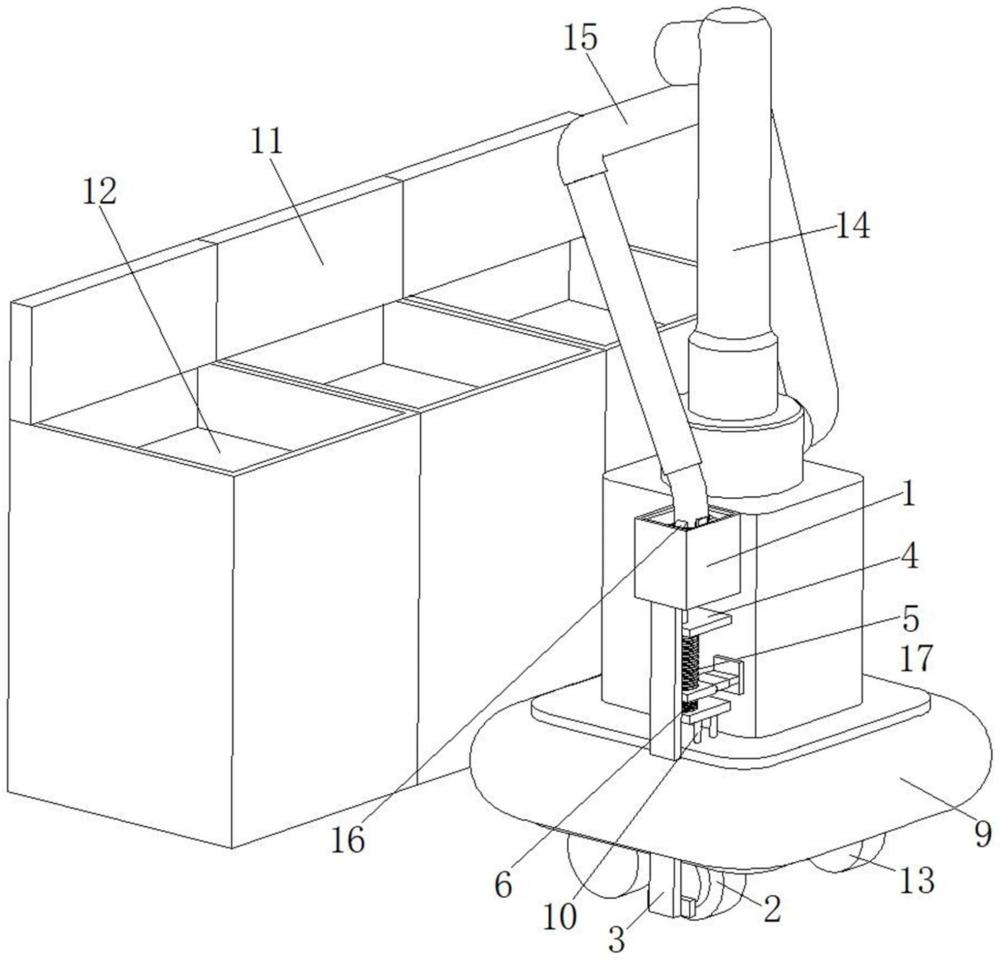
4、进一步,所述机器人体的下方设有滚轮,所述机器人体的一侧连接有清洗盒,所述夹具可伸入清洗盒的内侧,所述滚轮的一侧设有同步转动的转盘,所述转盘的侧面连接有固定柱,且固定柱的端部伸入到横槽板的内侧,所述横槽板被转盘连接的固定柱移动带动滑动杆竖向滑动,滑动杆和固定框通过弹性卡接件活动卡接,且滑动杆和固定框的内侧均连接有通水管,当滑动杆的顶端与固定框的端部活动卡接时,滑动杆和固定框内侧的通水管连通,所述通水管在固定框的内侧与刮板的内侧连通,且刮板的一侧开设有连通刮板内外侧的出水口,所述机器人体的侧面设有两个固定板,且上方固定板的底端设有伸缩囊,所述伸缩囊的内侧通过通液管与机器人体内侧的清洁液筒连通,所述伸缩囊的底端与滑动杆一侧连接的固定板连接,且通水管的端部贯穿固定板的内侧与伸缩囊的内部连通。
5、进一步,所述滑动杆和横槽板组成“t”字形,且滑动杆被转盘转动带动移动的竖向距离与夹具的夹板长度相同。
6、进一步,所述通液管和通水管均为单向管道,通液管单向向伸缩囊的内侧通入,通水管单向向刮板的内侧通入。
7、进一步,所述固定板的底端连接有伸缩气囊,且伸缩气囊的底端与下方的固定板连接,所述伸缩囊和伸缩气囊均为竖向伸缩的折叠气囊,所述伸缩气囊的内侧连通过有通气管,所述机器人体的外侧周向连皆有位于固定板下方的缓冲胶囊,所述伸缩气囊通过通气管与缓冲胶囊的内侧连通,所述固定板靠近机器人体的端部连接有横向伸缩的抵板,且抵板的内侧连接有弹簧,所述抵板的内侧通过管道与缓冲胶囊的内侧连通。
8、进一步,所述缓冲胶囊的截面形状呈圆弧内里朝向机器人体的半圆形,所述缓冲胶囊为弹性形变气囊,且缓冲胶囊弹性保持自身半圆弧形的形状。
9、进一步,所述通气管为单向管道,伸缩气囊通过通气管向缓冲胶囊的内侧补充气体。
10、本发明的有益效果是通过刮板在夹具的两个夹板夹紧和释放中,两组刮板会被弹性带和复位弹簧作用紧贴靠近的夹具外侧,便于刮板直接对夹具外表面进行刮动清理,且可通过直接驱动夹具的空夹,进行夹具表面的清理。
11、通过滑动杆的设置,滑动杆会被横槽板和转盘的驱动上下滑动,在夹具伸入清洗盒的内侧时,滑动杆和固定框的外侧卡接,令固定框会随着滑动杆的移动而上下移动,使固定框直接通过刮板对夹具的外侧进行清理,同时,在滑动杆的移动中会带动固定板移动,令固定板顶端连接的伸缩囊吸入清洁液后,通过通水管和出水口向夹具的外侧流出,对夹具的外侧彻底清洁,减少外侧湿润的垃圾影响干燥垃圾的情况,便于夹具对垃圾的分拣过程,减少垃圾的粘附。
技术特征:
1.一种垃圾智能分拣机器人,包括垃圾桶组(11),所述垃圾桶组(11)的顶端设有盛料盒(12),所述垃圾桶组(11)的前方有机器人体(14),所述机器人体(14)的外侧有带动夹具(16)移动夹取垃圾的机械臂(15),其特征在于,所述机械臂(15)的外侧通过伸缩杆连接有位于夹具(16)周向的清洗组件(3),所述清洗组件(3)包括固定框(33),且固定框(33)的内侧连接有分为两组的四个刮板(35),两组所述刮板(35)相互靠近的侧面连接有复位弹簧(34),且复位弹簧(34)远离刮板(35)的端部与固定框(33)的中部连接,所述刮板(35)的外侧设有弹性带(36),且弹性带(36)周向位于两组最边缘的两个刮板(35)外侧,弹性拉动刮板(35)相互靠近;
2.根据权利要求1所述的一种垃圾智能分拣机器人,其特征在于,每组所述刮板(35)相互接触的侧面顶边被倒斜角,且每组刮板(35)相互接触的面分别与夹具(16)的两个夹板接触。
3.根据权利要求1所述的一种垃圾智能分拣机器人,其特征在于,所述机器人体(14)的下方设有滚轮(13),所述机器人体(14)的一侧连接有清洗盒(1),所述夹具(16)可伸入清洗盒(1)的内侧,所述滚轮(13)的一侧设有同步转动的转盘(2),所述转盘(2)的侧面连接有固定柱,且固定柱的端部伸入到横槽板(32)的内侧,所述横槽板(32)被转盘(2)连接的固定柱移动带动滑动杆(31)竖向滑动,滑动杆(31)和固定框(33)通过弹性卡接件活动卡接,且滑动杆(31)和固定框(33)的内侧均连接有通水管(38),当滑动杆(31)的顶端与固定框(33)的端部活动卡接时,滑动杆(31)和固定框(33)内侧的通水管(38)连通,所述通水管(38)在固定框(33)的内侧与刮板(35)的内侧连通,且刮板(35)的一侧开设有连通刮板(35)内外侧的出水口(37),所述机器人体(14)的侧面设有两个固定板(4),且上方固定板(4)的底端设有伸缩囊(5),所述伸缩囊(5)的内侧通过通液管(7)与机器人体(14)内侧的清洁液筒连通,所述伸缩囊(5)的底端与滑动杆(31)一侧连接的固定板(8)连接,且通水管(38)的端部贯穿固定板(8)的内侧与伸缩囊(5)的内部连通。
4.根据权利要求3所述的一种垃圾智能分拣机器人,其特征在于,所述滑动杆(31)和横槽板(32)组成“t”字形,且滑动杆(31)被转盘(2)转动带动移动的竖向距离与夹具(16)的夹板长度相同。
5.根据权利要求3所述的一种垃圾智能分拣机器人,其特征在于,所述通液管(7)和通水管(38)均为单向管道,通液管(7)单向向伸缩囊(5)的内侧通入,通水管(38)单向向刮板(35)的内侧通入。
6.根据权利要求3所述的一种垃圾智能分拣机器人,其特征在于,所述固定板(8)的底端连接有伸缩气囊(6),且伸缩气囊(6)的底端与下方的固定板(4)连接,所述伸缩囊(5)和伸缩气囊(6)均为竖向伸缩的折叠气囊,所述伸缩气囊(6)的内侧连通过有通气管(10),所述机器人体(14)的外侧周向连皆有位于固定板(4)下方的缓冲胶囊(9),所述伸缩气囊(6)通过通气管(10)与缓冲胶囊(9)的内侧连通,所述固定板(8)靠近机器人体(14)的端部连接有横向伸缩的抵板(17),且抵板(17)的内侧连接有弹簧,所述抵板(17)的内侧通过管道与缓冲胶囊(9)的内侧连通。
7.根据权利要求6所述的一种垃圾智能分拣机器人,其特征在于,所述缓冲胶囊(9)的截面形状呈圆弧内里朝向机器人体(14)的半圆形,所述缓冲胶囊(9)为弹性形变气囊,且缓冲胶囊(9)弹性保持自身半圆弧形的形状。
8.根据权利要求6所述的一种垃圾智能分拣机器人,其特征在于,所述通气管(10)为单向管道,伸缩气囊(6)通过通气管(10)向缓冲胶囊(9)的内侧补充气体。
技术总结
本申请涉及垃圾分拣技术领域,且公开了一种垃圾智能分拣机器人,包括垃圾桶组,所述垃圾桶组的顶端设有盛料盒,所述垃圾桶组的前方有机器人体,所述机器人体的外侧有带动夹具移动夹取垃圾的机械臂,所述机械臂的外侧通过伸缩杆连接有位于夹具周向的清洗组件,所述清洗组件包括固定框,且固定框的内侧连接有分为两组的四个刮板。本发明通过刮板在夹具的两个夹板夹紧和释放中,两组刮板会被弹性带和复位弹簧作用紧贴靠近的夹具外侧,便于刮板直接对夹具外表面进行刮动清理,且可通过直接驱动夹具的空夹,进行夹具表面的清理。
技术研发人员:赵同彬
受保护的技术使用者:青岛海硕环保设备有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!