一种机器人末端视觉测试装置
本发明属于机器人测试设备,具体涉及一种机器人末端视觉测试装置。
背景技术:
1、工业机器人是一种广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性能,工业机器人是一种广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,能依靠自身的动力能源和控制能力实现各种工业加工制造功能。它们在电子、物流、化工等各个工业领域中都有广泛应用。
2、机器人末端视觉是指使用机器代替人眼来做测量和判断,让机器人能够更加智能。机器视觉系统包括:光源、镜头(定焦镜头、变倍镜头、远心镜头、显微镜头)、相机(包括ccd相机和coms相机)、图像处理单元(或图像捕获卡)、图像处理软件、监视器、通讯/输入输出单元等。
3、工业机器人能够智能化的模拟人的手臂进行各种操作,其主要依靠的就是机器人的末端视觉系统,对各种物品进行识别定位,才能精准的进行各项操作,但现阶段在机器人在生产结束之后都是应用到生产线之后再进行实际应用测试,这就导致了机器人末端视觉与机器人实际应用缺少测试,很容易在实际应用中产生误差,由于一般误差较小,不易被发现,很容易忽略,从而导致生产线上的产出的工件精度不高,良品率较低,不利于工件的高精度加工。
技术实现思路
1、本发明的目的是提供一种机器人末端视觉测试装置,能够在出厂前模拟真实的生产环境,全面检测工业机器人与末端视觉系统之间的搭配在实际应用中的情况,并进行调试,使得末端视觉系统能够近乎完美的匹配机器人,从而在应用到实际生产线时,能够进行高精度的加工操作,使得工件良品率更高。
2、本发明采取的技术方案具体如下:
3、一种机器人末端视觉测试装置,包括:
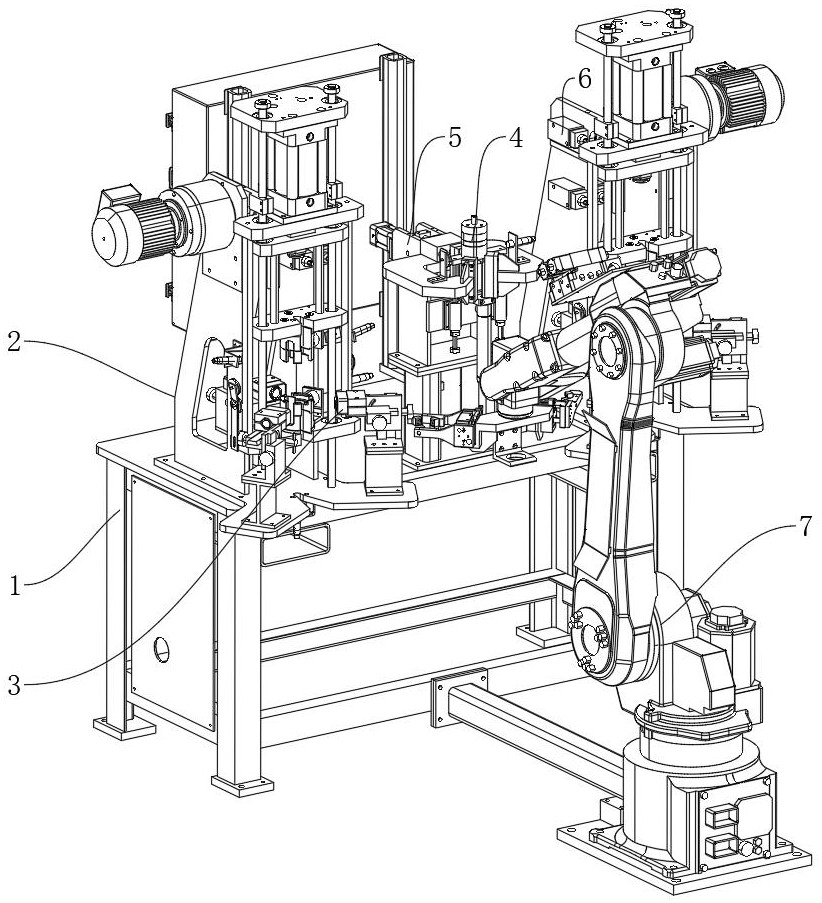
4、测试平台,其中一侧中心固定安装有支撑梁,所述支撑梁远离所述测试平台一端固定安装有用于固定安装工业机器人的安装座,所述测试平台顶面在所述安装座两侧对称安装有侧检测系统,且与所述安装座相对应安装有中心检测系统;
5、其中,所述侧检测系统包括周向测试组件和工业相机;
6、所述周向测试组件包括两组定位支座以及设置于所述定位支座上下部的垂直激光发射器和激光接收器,两组所述定位支座上下对向设置,所述定位支座与所述垂直激光发射器和所述激光接收器垂直轴心线位于同一条垂直线上,所述定位支座、所述垂直激光发射器以及所述激光接收器通过支撑机构安装于所述测试平台顶面;
7、所述工业相机至少设置有三组,且圆周阵列于所述定位支座周边;
8、其中,所述中心检测系统包括中心测试组件以及夹持在中心测试组件上的测试工件;
9、所述测试工件两端一体成型有定位销,且中心开设有测试通孔;
10、所述中心测试组件包括垂直安装于所述测试平台顶面的支撑平台、对称安装于所述支撑平台上的固定夹爪、活动安装于所述支撑平台上的活动夹爪以及用于支撑所述测试工件的托板,所述活动夹爪与所述支撑平台之间设置有用于驱动所述活动夹爪的水平推送机构,所述托板与所述支撑平台之间设置有用于驱动所述测试工件的垂直推送机构;
11、所述侧检测系统用于检测机器人末端视觉的旋转定位能力,所述中心检测系统用于检测机器人末端视觉的中心定位能力。
12、所述支撑机构包括固定安装于所述测试平台顶面的y型支板、对称安装于所述y型支板顶面的侧支板和垂直支柱以及滑动安装于所述垂直支柱上的下支座、上支座和升降板,所述上支座与所述侧支板之间设置有用于驱动所述上支座上下移动的第一升降机构,所述下支座与所述侧支板之间设置有用于驱动所述下支座上下移动的第二升降机构,两组所述定位支座分别安装于所述下支座和所述上支座上,所述垂直激光发射器和所述激光接收器分别安装于所述y型支板底面以及所述升降板底面。
13、所述第一升降机构包括滑动安装于所述垂直支柱之间的第一活动支板和第二活动支板以及固定安装于所述第一活动支板与所述第二活动支板之间的升降气缸,所述升降气缸动力输出端贯穿所述第一活动支板固定安装于所述升降板上,所述升降板两端通过设置有第一垂直连杆与所述上支座固定连接。
14、所述第二升降机构包括固定安装于所述侧支板上的蜗轮蜗杆升降机和伺服电机,所述伺服电机的动力输出端通过减速器与所述蜗轮蜗杆升降机的动力输出端传动连接,所述蜗轮蜗杆升降机的动力输出端固定安装于所述第二活动支板的底面,所述第一活动支板两端通过设置有第二垂直连杆与所述下支座两端固定连接。
15、所述定位支座中心贯穿开设有v字型的激光通槽,且侧面通过支架固定安装有定位气缸,所述定位气缸动力输出端固定安装有定位舌,所述定位舌贯穿所述定位支座延伸至所述激光通槽内,所述下支座与所述上支座上均开设有与所述激光通槽相似结构的v型槽。
16、所述y型支板顶面还设置有用于支撑所述工业相机的调节机构,所述调节机构包括通过工字钢固定安装于所述y型支板顶面的垂直支座,所述垂直支座侧面垂直滑动安装有垂直滑座,且所述垂直支座上还螺纹连接有用于抵紧所述垂直滑座的第一抵紧螺母,所述垂直滑座上开设有弧形槽,所述弧形槽内滑动安装有水平支座,所述水平支座的滑轴上螺纹连接有抵紧螺纹套,所述水平支座上水平滑动安装有水平夹座,且所述水平支座上螺纹连接有用于抵紧所述水平夹座的第二抵紧螺母,所述工业相机固定安装于所述水平夹座上。
17、所述定位销与所述测试通孔中心相贯通,所述测试通孔呈漏斗状。
18、所述垂直推送机构包括固定安装于所述支撑平台侧面的垂直限位滑座、滑动安装于所述垂直限位滑座内的限位支杆以及垂直安装于所述支撑平台上的第一推送气缸,所述限位支杆顶端固定安装于所述托板底面,所述第一推送气缸动力输出端固定安装于所述托板底面。
19、所述水平推送机构包括水平固定安装于所述支撑平台上的第二推送气缸、固定安装于所述第二推送气缸动力输出端的推送杆以及固定安装于所述支撑平台顶面的水平限位滑座,所述推送杆滑动连接于所述水平限位滑座内,且远离所述第二推送气缸一端固定安装于所述活动夹爪上。
20、还包括垂直限位组件,用于限定所述下支座和所述上支座的垂直升降,所述垂直限位组件包括固定安装于所述侧支板侧面的限位气缸,所述限位气缸动力输出端末端垂直转动连接有限位滚轮。
21、本发明取得的技术效果为:
22、本发明设置活动夹爪和托板相配合,能够在不同高度对测试工件的位置进行定位,从而可精准的测试工业机器人在对工件夹持的过程中能否准确识别其夹持位置,保证取料的精准性,进而检测末端视觉在取料的实际应用过程中与工业机器人的配合程度,能多角度,多位面的进行检测,使得取料测试结果准确性更高,与实际使用情况更加相符;
23、本发明设置两组定位支座相配合,可在检测时不断改变两组定位支座的相对位置,检测工业机器人能否将测试工件准确的输送到所需要的位置,从而检测末端视觉在放料的实际应用过程中与工业机器人的配合程度,能多角度,多位面的进行检测,使得放料测试结果准确性更高,与实际使用情况更加相符;
24、本发明设置测试工件与垂直激光发射器、激光接收器相配合,同时测试通孔呈漏斗状,只有在垂直对准精度较高的情况下,激光才能通过测试通孔,从而利用激光接收器的激光接收率来计算测试工件相较于定位支座垂直对齐的偏心率,从而检测出工业机器人末端视觉系统的实际识别能力;
25、本发明设置工业相机,可拍摄放置位置画面,用于进行对比分析放置位置的偏离程度,并可以利用伺服电机和升降气缸同步夹持测试工件,再次通过工业相机拍摄夹持画面,用于对比分析放置位置的偏离程度,再通过定位气缸推动定位舌对测试工件进行定位,并拍摄定位画面,对比分析放置与实际加工时的位置偏差,从而精准分析末端视觉与工业机器人的配合程度;并设置两组周向测试组件和工业相机进行测试,从而更加全面的评价末端视觉与工业机器人的实际配合程度,使得分析结果更加全面和准确,保证实际应用时能够到达最理想的效果。
- 还没有人留言评论。精彩留言会获得点赞!