一种用于高温环境中圆形工件自动测温及取件机器人装置
本发明涉及热处理淬火实验设备,尤其涉及一种用于高温环境中圆形工件自动测温及取件机器人装置。
背景技术:
1、针对镍基高温合金的晶体结构进行优化研究,减少残余应力,并提高合金的高温性能,需要将高温合金加热到高温后进行淬火实验。由于加热后的金属具有很高的温度,所以需要通过人工使用工具操作来对其进行夹持和搬运。在实验的高温合金较大时,人力往往夹持力量不足,极易导致高温合金工件脱落,造成实验人员和设备的砸伤、烫伤,存在极大安全隐患。同时淬火温度是淬火过程中最重要的参数之一。工件在淬火开始的快速冷却阶段,被暴露于冷却介质中。工件表面温度急剧下降,但在深层结构中温度下降比较慢,从而温度梯度特别大。因此在淬火初期需要及时进行密集的温度采集,避免计算误差过大。
2、目前,在人工夹持和搬运高温合金工件的过程耗时长,还未进行淬火冷却实验合金工件已经降温,难以获得完整的淬火过程温度变化曲线,影响实验后续研究。
3、专利文件cn215544641u,涉及为一种使用寿命长的高温锻件夹取工具,包括底座,所述底座的顶部通过固定板固定连接有套筒,所述套筒的内部插接有伸缩柱,所述伸缩柱的顶端通过轴承件转动连接有联动箱,所述联动箱内腔顶部的右侧固定连接有第一滑槽板,本专利涉及锻件加工技术领域。该使用寿命长的高温锻件夹取工具,通过使用弯形架来连接弧形夹框,当对锻件夹持搬运结束后,可使两个弧形夹框通过导接管和导接口相连接,随后启动水泵将水箱内的水通过第一导水管注入弯形架中,使水流经两个弧形夹框再通过第二导水管流回水箱内,通过此结构能够利用水的导热性将夹具上的温度带走,使整体的温度降低,从而保证了夹具不会长时间地遭受高温侵蚀。但是上述公开文件中的夹取工具使用时主要考虑弧形夹的设计和运动,并对弧形夹进行冷却,并没有考虑到针对高温圆形工件的夹取,也没有考虑对被夹取工件进行实时温度测量,也没有对夹取工具进行自动化设计,无法减小后续温度测量的误差。
4、专利文件cn102806298a,涉及一种用于热模锻高温工件夹取的搬运机器人,包括机架和可夹取工件的机械手臂,还包括安装座和伸缩气缸,机架上固定有回转工作台,回转工作台的旋转轴上通过连接过渡板安装有可使安装座横向移动的直线运动模组,机械手臂铰接在安装座上,伸缩气缸的一端铰接在安装座上,伸缩气缸的另一端与机械手臂的尾端铰接。本发明价格低廉、作业范围大、组合方便并且符合热模锻工作现场工件的夹取要求。但是上述公开文件中的搬运机器人在使用时主要考虑提高空间利用率和系统灵活度,机器人平台固定放置,并没有考虑机器人平台的移动,也没有考虑到针对高温圆形工件的夹取,也没有考虑对被夹取工件进行实时温度测量,使用场景较少,适用范围较小。
5、专利文件cn110586787a,涉及一种长轴类复杂高温冲压件拾取装置,包括:底座,所述底座底部配置有移动装置;旋转座,安装在底座上表面;升降装置,树立在旋转座上;上横梁,上横梁固定在升降装置的顶端,所述上横梁设置有若干个水平横杆,在各所述水平横杆远离升降装置的一端下表面设置有机械式抓取装置,且在所述水平横杆另一端设置有电动驱动装置,所述电动驱动装置和所述机械式抓取装置之间通过连接件传动;视觉探测装置,通过一立杆树立在底座一侧。但是上述公开文件中的拾取装置主要考虑拾取长轴类零件,避免了不耐高温的材料的使用,能够在较高温度下工作时,并没有考虑对圆形工件进行夹取,也没有考虑对被夹取工件进行实时温度测量,也没有对零件进行冷却,耐高温性较差,通用性不高。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种用于高温环境中圆形工件自动测温及取件机器人装置,能够同时完成取件和测温任务,并能全自动、安全高效的将工件转运并测量温度变化,特别是可以完整测量工件从高温环境中取出到淬火过程的降温过程,给淬火研究提供完整的数据链,从而提高了淬火实验研究的准确性。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种用于高温环境中圆形工件自动测温及取件机器人装置,包括:
4、移动机构,用于带动机器人移动;
5、升降机构,设于移动机构的上方,用于带动机器人做上升或下降运动;
6、圆形工件取件机构,设于升降机构的上方,用于对圆形工件在高温环境中自动取件;
7、测温机构,与圆形工件取件机构连接,用于对圆形工件自动测温;
8、中控平台,与测温机构、移动机构、升降机构、圆形工件取件机构电性连接,用于控制机器人并实时显示机器人的工作状态和实时测温数据。
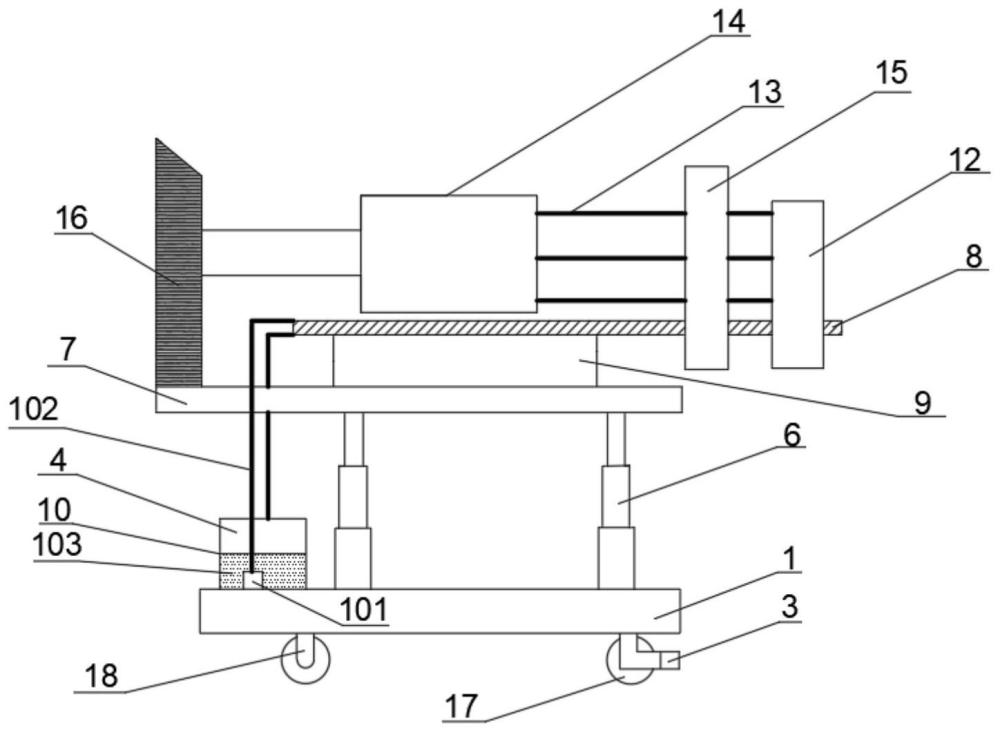
9、优选地,所述移动机构包括底盘、设于底盘上的电池组和转向舵机,所述电池组设于底盘的后端部,所述转向舵机设于电池组的一侧;所述底盘的底部设有四个移动轮,四个移动轮均通过移动轮支架与底盘连接;每个所述移动轮均由独立的移动轮电机驱动;前端两个移动轮上安装有循迹导航传感器,后端两个移动轮均与转向舵机连接。
10、优选地,所述升降机构包括设于底盘上的液压升降杆和承载平台,所述承载平台水平设于液压升降杆的上方。
11、优选地,所述圆形工件取件机构包括设于承载平台上的支撑架、以及安装于支撑架上的两根伸缩臂,两根伸缩臂间隔设置,两根所述伸缩臂的前端承载有圆形工件,两根所述伸缩臂的后端连接有冷却系统,两根所述伸缩臂的中端安装有炉门,所述炉门包括主炉门和副炉门。
12、优选地,所述测温机构包括热电偶,所述热电偶的前端贯穿主炉门的孔洞并与圆形工件的测温孔插接,所述热电偶的后端通过引线保护器与中控平台连接。
13、优选地,所述中控平台包括多功能显示屏、运动控制器、升降控制器、伸缩控制器、无线收发器和温度采集器;所述运动控制器、升降控制器、伸缩控制器、无线收发器和温度采集器均与多功能显示屏电性连接。
14、其中,多功能显示屏用于实时显示机器人的工作状态和实时测温数据;
15、运动控制器用于控制移动轮电机、循迹导航传感器、转向舵机,控制机器人进行前进、后退、转弯、原地掉头等动作;
16、升降控制器用于控制液压升降杆,控制承载平台的升降和坡度;
17、伸缩控制器用于控制伸缩臂和伸缩电机,控制伸缩臂的长度和间距;
18、无线收发器通过接受遥控器的信号来控制机器人运动;
19、温度采集器用于接收热电偶的电信号并转化为温度值。
20、优选地,所述冷却系统包括水泵、水管和冷却水箱,所述冷却水箱设于电池组的下方,所述水泵设于冷却水箱的一侧,所述水泵通过水管与伸缩臂连接。
21、优选地,所述支撑架上设有用于调节两根伸缩臂间距的间距调节器,所述间距调节器包括伸缩电机、伸缩杆、接触板、滑轨、固定箍和底板,所述底板安装于滑轨上,所述固定箍用于固定伸缩臂并与底板连接,所述底板的一端设有接触板,所述接触板通过伸缩杆与伸缩电机连接,由伸缩电机驱动通过伸缩杆推拉接触板使得底板沿滑轨移动。
22、优选地,所述伸缩臂为中空结构,所述伸缩臂为耐高温合金伸缩臂,所述伸缩臂内分别设有冷却水入口和冷却水出口,冷却水入口和冷却水出口之间设有隔板分开。
23、优选地,所述热电偶上套接有刚玉保护套或不锈钢保护套。
24、与现有技术相比,本发明具有以下有益效果:
25、1、本发明可以安全、快速的将工件从高温环境中取出,避免了传统需要依靠人工夹取时的安全问题,同时也提高了取件效率,也解决了人工力量不足无法夹取工件的问题。
26、2、本发明可以实时测量工件在转运过程中的温度,特别是可以完整测量工件从高温环境中取出到淬火过程的降温过程,给淬火研究提供完整的数据链,提高了淬火实验研究的准确性。
27、3、本发明的伸缩臂的长度和间距可调,可满足圆形工件的不同尺寸;同时配备冷却系统,可提高伸缩臂的耐温程度,也使机器人免受高温的损坏,有效延长其使用寿命。
28、4、本发明采用升降机构可调整承载平台坡度,中控平台可以实时显示机器人的运行状态和温度测量数据,能够实现全自动化操作,避免取件过程时间长造成的温度测量不及时的问题。
29、5、本发明将炉门和圆形工件同步移动,炉门在转移工件过程中可以起到阻热的作用,防止烧坏门后的架子设备,同时也减少了开关炉门的操作,节省时间和工序。
- 还没有人留言评论。精彩留言会获得点赞!