一种目标抓取方法、机器人、电子设备和存储介质与流程
本技术涉及智能机器人领域,具体而言,涉及一种目标抓取方法、机器人、电子设备和存储介质。
背景技术:
1、现有的机械臂抓取多个目标的方法一般为识别目标,并按照固定路径依次对多个目标进行抓取。但是,在工业生产操作中常常出现如水果分拣等需要对大量分布不均的目标进行抓取的场景,此时若仍使用按照固定路径抓取的抓取方法,则可能需要频繁调整机械臂的参数,导致抓取速度慢且生产效率低。
2、因此,现有技术有待改进和发展。
技术实现思路
1、本技术的目的在于提供一种目标抓取方法、机器人、电子设备和存储介质,旨在解决现有的目标抓取方法在需要对大量分布不均的目标进行抓取的场景下抓取速度慢及生产效率低的问题。
2、第一方面,本技术提供了一种目标抓取方法,应用于机械臂,包括以下步骤:
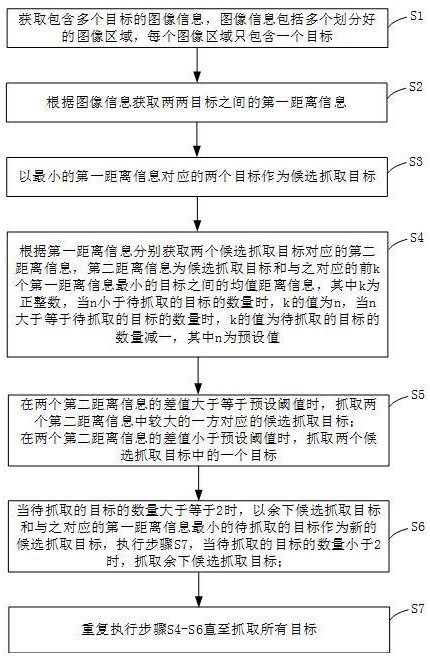
3、s1.获取包含多个目标的图像信息,图像信息包括多个划分好的图像区域,每个图像区域只包含一个目标;
4、s2.根据图像信息获取两两目标之间的第一距离信息;
5、s3.以最小的第一距离信息对应的两个目标作为候选抓取目标;
6、s4.根据第一距离信息分别获取两个候选抓取目标对应的第二距离信息,第二距离信息为候选抓取目标和与之对应的前k个第一距离信息最小的目标之间的均值距离信息,其中k为正整数,当n小于待抓取的目标的数量时,k的值为n,当n大于等于待抓取的目标的数量时,k的值为待抓取的目标的数量减一,其中n为预设值;
7、s5.在两个第二距离信息的差值大于等于预设阈值时,抓取两个第二距离信息中较大的一方对应的候选抓取目标;
8、在两个第二距离信息的差值小于预设阈值时,抓取两个候选抓取目标中的一个目标;
9、s6.当待抓取的目标的数量大于等于2时,以余下候选抓取目标和与之对应的第一距离信息最小的待抓取的目标作为新的候选抓取目标,执行步骤s7,当待抓取的目标的数量小于2时,抓取余下候选抓取目标;
10、s7.重复执行步骤s4-s6直至抓取所有目标。
11、本技术提供的目标抓取方法,以最小的第一距离信息对应的两个目标作为候选抓取目标,能在不改变机械臂位移路径的情况下提高两个候选抓取目标都位于机械臂抓取范围内的概率;并且本技术在两个第二距离信息的差值大于等于预设阈值时,抓取两个第二距离信息中较大的一方对应的候选抓取目标,能使余下的候选抓取目标的第二距离信息更小,在不改变机械臂位移路径的情况下提高后续抓取过程中新的候选抓取目标位于机械臂抓取范围内的概率;并且本技术在两个第二距离信息的差值小于预设阈值时,抓取两个候选抓取目标中的一个目标,能尽量减小目标抓取方法在仅考虑目标之间的距离时产生的影响;并且本技术以余下候选抓取目标和与之对应的第一距离信息最小的待抓取的目标作为新的候选抓取目标,在不改变机械臂位移路径的情况下提高后续抓取过程中新的候选抓取目标位于机械臂抓取范围内的概率,从而能降低机械臂参数的调整频率,加快抓取速度并提高生产效率。
12、可选地,n∈[2,φ-1],其中φ为图像信息中待抓取的目标的数量。
13、可选地,步骤s5中,抓取两个候选抓取目标中的一个目标的过程中,抓取第二距离信息较大的候选抓取目标的概率大于抓取第二距离信息较小的候选抓取目标的概率。
14、可选地,步骤s2中,根据图像信息获取两两目标之间的第一距离信息的过程包括:
15、a1.根据两两图像区域的几何中心之间的距离获取两两目标之间的第一距离信息。
16、可选地,步骤s1中,图像区域的形状为凸多边形或圆,步骤s2中,根据图像信息获取两两目标之间的第一距离信息的过程包括:
17、b1.根据两两图像区域的几何中心之间的距离获取中心距离信息;
18、b2.根据两两图像区域的几何中心之间的线段与对应的两个图像区域的两个交点之间的距离获取边缘距离信息;
19、b3.根据中心距离信息和边缘距离信息获取两两目标之间的第一距离信息。
20、在该实施方式中,本技术的目标抓取方法根据中心距离信息和边缘距离信息获取两两目标之间的第一距离信息,能将两两目标中心之间的距离和边缘之间的距离都作为获取两两目标之间的第一距离信息的依据,从而能使获取的第一距离信息更准确。
21、可选地,步骤s1中,图像区域彼此不重叠,步骤b3中,根据中心距离信息和边缘距离信息获取两两目标之间的第一距离信息的公式为:di,j=αd1+βd2,其中di,j为第一距离信息,d1为中心距离信息,d2为边缘距离信息,α和β分别为d1和d2的权重参数,0<α≤1,0≤β<1,α与β之和为1,α>β。
22、在该实施方式中,本技术的目标抓取方法使中心距离信息d1的权重参数α大于边缘距离信息d2的权重参数β,能使获取的第一距离信息中中心距离信息d1的权重高于边缘距离信息d2的权重,从而能使获取的第一距离信息更准确。
23、可选地,图像区域的形状为该图像包含的目标的最小外接矩形。
24、第二方面,本技术还提供了一种机器人,包括:
25、相机,用于拍摄包含多个目标的图像;
26、机械臂,用于执行如上任一目标抓取方法以抓取目标。
27、本技术提供的机器人,以最小的第一距离信息对应的两个目标作为候选抓取目标,能在不改变机械臂位移路径的情况下提高两个候选抓取目标都位于机械臂抓取范围内的概率;并且本技术在两个第二距离信息的差值大于等于预设阈值时,抓取两个第二距离信息中较大的一方对应的候选抓取目标,能使余下的候选抓取目标的第二距离信息更小,在不改变机械臂位移路径的情况下提高后续抓取过程中新的候选抓取目标位于机械臂抓取范围内的概率;并且本技术在两个第二距离信息的差值小于预设阈值时,抓取两个候选抓取目标中的一个目标,能尽量减小目标抓取方法在仅考虑目标之间的距离时产生的影响;并且本技术以余下候选抓取目标和与之对应的第一距离信息最小的待抓取的目标作为新的候选抓取目标,在不改变机械臂位移路径的情况下提高后续抓取过程中新的候选抓取目标位于机械臂抓取范围内的概率,从而能降低机械臂参数的调整频率,加快抓取速度并提高生产效率。
28、第三方面,本技术提供一种电子设备,包括处理器和存储器,存储器存储有处理器可执行的计算机程序,处理器执行计算机程序时,运行如上任一目标抓取方法中的步骤。
29、第四方面,本技术提供一种存储介质,其上存储有计算机程序,计算机程序被处理器执行时运行如上任一目标抓取方法中的步骤。
30、由上可知,本技术提供了一种目标抓取方法、机器人、电子设备和存储介质,其中本技术提供的目标抓取方法,以最小的第一距离信息对应的两个目标作为候选抓取目标,能在不改变机械臂位移路径的情况下提高两个候选抓取目标都位于机械臂抓取范围内的概率;并且本技术在两个第二距离信息的差值大于等于预设阈值时,抓取两个第二距离信息中较大的一方对应的候选抓取目标,能使余下的候选抓取目标的第二距离信息更小,在不改变机械臂位移路径的情况下提高后续抓取过程中新的候选抓取目标位于机械臂抓取范围内的概率;并且本技术在两个第二距离信息的差值小于预设阈值时,抓取两个候选抓取目标中的一个目标,能尽量减小目标抓取方法在仅考虑目标之间的距离时产生的影响;并且本技术以余下候选抓取目标和与之对应的第一距离信息最小的待抓取的目标作为新的候选抓取目标,在不改变机械臂位移路径的情况下提高后续抓取过程中新的候选抓取目标位于机械臂抓取范围内的概率,从而能降低机械臂参数的调整频率,加快抓取速度并提高生产效率。
31、本技术的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术了解。本技术的目的和其他优点可通过在所写的说明书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!