一种门锁的电控系统及电控方法与流程
本发明涉及车门锁领域,尤其是涉及一种门锁的电控系统及电控方法。
背景技术:
1、车门在关闭时由门锁碰撞汽车锁柱后,门锁扣住锁柱来关闭车门。现有车门关闭时存在一个半锁状态,为了实现车门自动从半锁变为全锁,一般复杂的传感器组件、开关控制、驱动部等大量的器件,从而造成车门厚度增加,占用大量空间,严重影响车辆组装速度,还存在无用能耗的浪费。针对现有技术的自闭合车门锁,与机壳转动连接的旋转锁舌设置受推部后,旋转锁舌对应受推部的位置半径增大,旋转锁舌转动过程中的途径的面积增大,机壳内的推杆本体、止动爪等零部件需要增大与旋转锁舌转轴的距离,避免干涉旋转锁舌的正常转动,但会造成自吸门锁零部件分布不紧凑,整体体积增大,对自吸门锁的便利安装和通用性产生不良影响。
2、现有技术可参考申请公开号为cn104389467b的中国发明专利,其公开了一种汽车车门自适应接触式关闭控制系统,包括第一压力感应单元、加速度感应单元、数据接收单元、数据比较判断单元、预设数据输入单元、指令输出单元和车门指令动作执行单元,车门与对应车门框架之间的车门锁为电控插销单元;设计各单元模块之间的数据传输,通过针对压力感应单元和加速度感应单元感应到的数据进行比较判断,感知关门动作,并采用车门指令动作执行单元按照预设工作执行功率针对车门实现关闭操作,使得车门按照一个适中的速度进行关闭,同时设计车门锁为电控插销单元,引入电控接触式关闭方式。
3、上述中的现有技术方案存在以下缺陷:汽车自吸门锁在半锁状态下自动复位时,由于所处空间狭小,所以需要结构更小、缩合效果更精准的自吸门锁。
技术实现思路
1、为了能够在狭小空间内精准地实现门锁的自动吸合,本技术提供一种门锁的电控系统及电控方法。
2、一方面,本技术提供的一种门锁的电控系统采用如下的技术方案:
3、一种门锁的电控系统,包括设置于车体或车门上的机壳和设置于机壳内的电控系统,机壳内转动连接有旋转锁舌和止动爪,旋转锁舌上开设有供锁柱卡接的锁口,止动爪能够卡接于旋转锁舌对应锁口位置处,机壳靠近锁柱位置处开设有供锁柱进入的锁合通道,止动爪连接有推动止动爪转动的弹性组件,止动爪在弹性组件的动力下抵接于旋转锁舌;
4、机壳转动连接有受推部,受推部一端转动连接有推杆本体,受推部另一端连接有用于推动受推部转动的驱动组件,推杆本体能够抵接旋转锁舌,推杆本体滑动连接于机壳上,推杆本体在靠近或远离旋转锁舌方向滑移,当驱动组件推动受推部转动使推杆本体靠近旋转锁舌滑移且止动爪卡接于锁口时,推杆本体推动旋转锁舌转动,直至锁柱卡接于锁口内且止动爪与锁口分离,当锁柱卡接于锁口内且止动爪与锁口分离时,推杆本体无法抵接旋转锁舌;
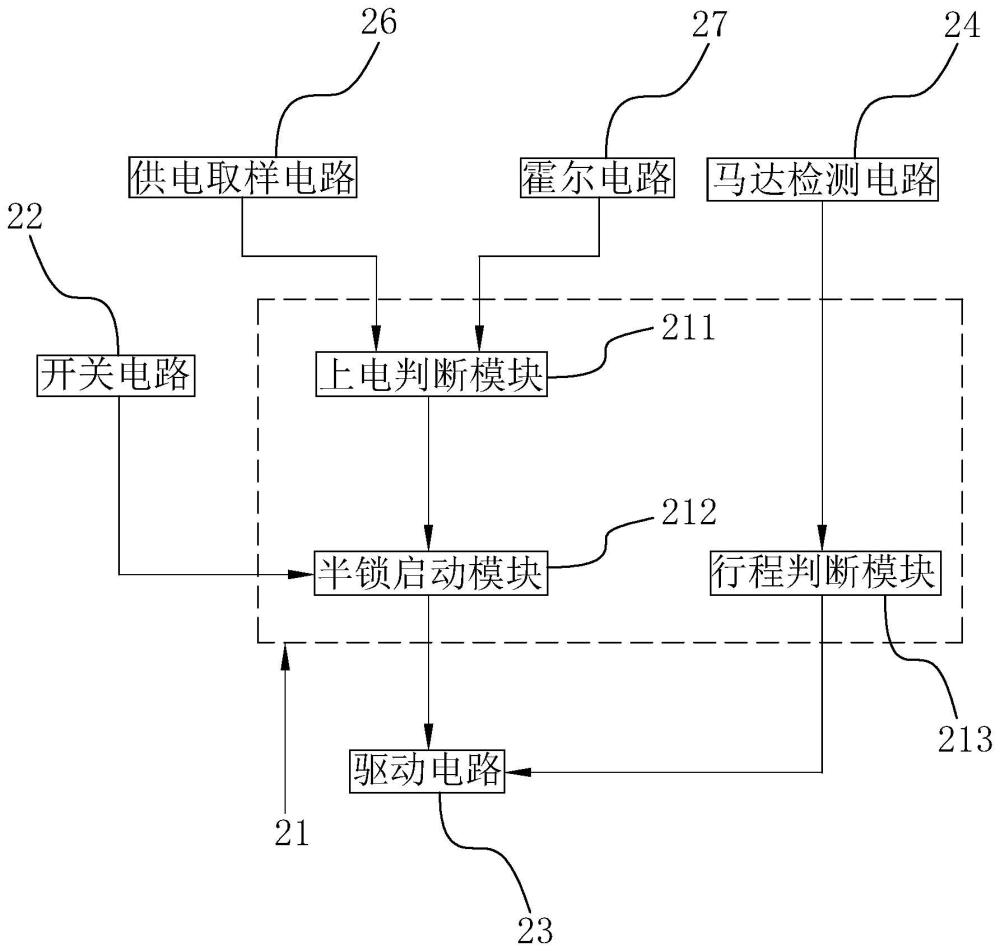
5、所述电控系统包括总控电路、开关电路和驱动电路,所述总控电路包括上电判断模块和半锁启动模块;
6、所述开关电路检测止动爪的状态,当止动爪由锁口外移动至锁口处时,以及止动爪由锁口处移动锁口外时,信号输入模块均向半锁启动模块传输接触信号;
7、所述驱动电路接收启动信号后控制驱动组件推动受推部转动使推杆本体向靠近旋转锁舌方向移动,直至运动至极限后返回;
8、所述上电判断模块在电控系统上电后判断门锁处于开锁状态还是全锁状态,若处于开锁状态,则向半锁启动模块传输开锁信号;
9、所述半锁启动模块接收到开锁信号后等待接收接触信号,半锁启动模块第一次接收到接触信号后向驱动电路传输启动信号,半锁启动模块第二次接收到接触信号后判断门锁处于全锁状态,半锁启动模块第四次接收接触信号后重置接收接触信号的计数。
10、通过采用上述方案,本方案的门锁结构简单,占用空间小,并且电控系统自动判断门锁状态,并根据门锁的动作来触发自锁,保证自锁控制精确,仅在需要车门半锁的时候才进行自锁。
11、优选的,所述开关电路包括固定连接于机壳对应止动爪下方的微动开关,当止动爪卡接于锁口时,止动爪松开微动开关,微动开关输出接触信号。
12、通过采用上述方案,当旋转锁舌转动时会带动止动爪转动,通过微动开关来检测止动爪的位置,在门锁由开锁状态切换到半锁状态,以及由半锁状态切换到开锁状态的过程中,止动爪都会触发一次微动开关,在确定门锁初始状态后,通过计数微动开关的触发次数即可判断当前门锁状态。
13、优选的,所述驱动组件包括固定连接于受推部的驱动扭簧,驱动扭簧另一端固定连接于机壳上,受推部正向转动时推杆本体向靠近旋转锁舌方向移动,驱动扭簧给受推部反向转动的力,受推部远离推杆本体一端固定连接有弹簧拉线,弹簧拉线另一端固定连接有绞盘,弹簧拉线缠绕于绞盘上,绞盘固定连接有马达,马达带动绞盘转动时,弹簧拉线给受推部正向转动的力;
14、所述驱动电路接收启动信号后控制马达启动,当马达达到行程终点时马达反转直至复位。
15、通过采用上述方案,当马达带动绞盘转盘时,弹簧拉线会拉动受推部转动,使推杆本体向靠近旋转锁舌方向移动,驱动扭簧在马达不给受推部施力时会带动受推部复位,让推杆本体向远离旋转锁舌方向移动。
16、优选的,所述电控系统还包括马达检测电路,所述总控电路还包括行程判断模块;
17、所述马达检测电路当马达启动后检测马达的电流值并将电流值传输给行程判断模块;
18、所述行程判断模块设定有极限电流值,当接收的电流值达到极限电流值时,则判断马达到达极限行程,并向驱动电路传输复位信号,驱动电路接收到复位信号后控制马达反转直至复位。
19、通过采用上述方案,通过检测马达的电流可以判断马达的输出轴是否达到极限行程,帮助马达复位,避免马达长时间保持极限行程,影响马达寿命。
20、优选的,所述电控系统还包括供电电路和供电取样电路;
21、所述供电电路用于向电控系统供电;
22、所述供电取样电路检测供电电路的供电电压并传输给上电判断模块;
23、所述上电判断模块预设有低压设定值,当供电电压高于低压设定值时,上电判断模块判断电控系统上电。
24、通过采用上述方案,在供电电路开始供电时,供电电压高于低压设定值,电控系统才会判断上电,避免出现微弱电流触发上电判定。
25、优选的,所述电控系统还包括霍尔电路;
26、所述霍尔电路包括用于检测马达是否超出极限行程的霍尔开关,霍尔开关检测到马达超出极限行程时向上电判断模块传输响应信号;
27、所述上电判断模块判断电控系统上电后,若接收到响应信号,则向驱动电路传输启动信号,若在输出启动信号后接收到响应信号,则向半锁启动模块传输开锁信号。
28、通过采用上述方案,霍尔开关灵敏度高,能够对马达是否超出极限行程进行准确检测。
29、优选的,霍尔开关设置于机壳或绞盘上,绞盘或机壳上固定连接有磁铁,当锁柱和止动爪均与锁口分离,且马达超出极限行程时,霍尔开关感应到磁铁并向上电判断模块输出响应信号。
30、通过采用上述方案,霍尔开关能够检测磁场,磁铁能够改变磁场,让马达超出极限行程后,磁铁刚好转到霍尔开关前,霍尔开关检测到磁铁发出响应信号。
31、优选的,总控电路包括芯片u4;电控系统包括隔离干扰模块,隔离干扰模块包括设置在电路板上的电感l4;
32、供电电路包括接入电源vp的一级滤波模块,一级滤波模块输出两路,一路经过整流二极管d2输出给马达模块,一路通过整流二极管d6后,经过多频率滤波模块输出电压vcc,电压vcc接入变压模块后输出工作电压3.3v;
33、一级滤波模块包括并联的电容c1、c2、c4;
34、多频率滤波模块包括并联的电容c9、c11、c13、c14、c16、c17、c18;
35、变压模块包括稳压器u7;
36、vcc通过并联电容c3、c6滤波后进入稳压器u7,稳压器u7通过电感l2及并联电容c12、c15滤波整流后输出工作电压3.3v;
37、驱动电路包括芯片u5,在芯片u5中,脚1、2接入芯片u4的输出端,以接收启动信号,并通过输出端outa、b接马达输入端,脚4接入经过并联电容c20、c21滤波的电压vd,脚3的cs端通过取样电阻r12接地;
38、供电取样电路包括电阻r5、电容c19及电感l3,电压vcc通过分压电阻r5后,通过滤波整流的电容c19及电感l3输出电信号vpsample给芯片u4;
39、马达检测电路包括芯片u3,在芯片u3中,cs端通过电感l6及电容c22组成的整流滤波模块接入脚1,脚5工作电压3.3v,脚4通过分压电阻r19输出采样电流msmp给芯片u4;
40、开关电路包括常开动闭合的响应开关s2,响应开关s2一端接地一端接bg通道,芯片u4的nit0通过二极管d5后接bgi通道,bgi通道接入芯片u4,bgi通道通过电阻r11接bg通道且通过反接二极管d4接地;
41、电控系统还接有门把手信号,门把手信号包括接入芯片u4的电阻r15,门把手信号经过电阻r15进入芯片u4;
42、霍尔电路包括用于采集霍尔元件信号的芯片u1及霍尔唤醒模块,霍尔唤醒模块采用二级mos管q4、q1的控制电路,芯片u4输出hallpwctr给激励mos管的q4的d端,s端接地,g端通过下拉电阻r13接入3.3v,激励mos管q4的g端接控制mos管q1的d端,控制mos管q1的s端接入3.3v,控制mos管q1的g端接芯片u1的vcc端,芯片u1的vout端接芯片u4脚7。
43、通过采用上述方案,通过多个滤波和稳压电路能够让电控系统的控制更准确。
44、另一方面,本技术提供的一种门锁的电控方法采用如下的技术方案:
45、一种门锁的电控方法,包括以下步骤:
46、判断电控系统是否上电;
47、若上电,重置系统;
48、判断门锁处于开锁状态或全锁状态;
49、若门锁处于开锁状态,则计算接收接触信号的次数;
50、若接收接触信号一次,则控制驱动组件推动推杆本体;
51、若接收接触信号两次,则判断门锁处于全锁状态;
52、若接收接触信号四次,则重置接收接触信号的计数。
53、通过采用上述方案,上电时判断门锁初始状态,并根据门锁的动作来触发自锁,保证自锁控制精确,仅在需要车门半锁的时候才进行自锁。
54、优选的,步骤判断电控系统是否上电包括:
55、检测供电电路的供电电压,若供电电压高于低压设定值时,则判断电控系统上电;
56、步骤判断门锁处于开锁状态或全锁状态包括:
57、控制驱动组件推出推杆本体;
58、若推杆本体超出极限行程,即接收到响应信号,则判断门锁处于开锁状态;
59、若推杆本体没有超出极限行程,则判断门锁处于全锁状态。
60、通过采用上述方案,通过供电电压与低压设定值比较可以比较准确地判断电控系统是否上电。推杆本体若到达极限行程,即推杆本体抵接到旋转锁舌,此时门锁一定处于全锁状态,若推杆本体超出极限行程,即推杆本体运动到极限也没有接触旋转锁舌,此时门锁一定处于开锁状态,判断准确,检测简单。
61、综上所述,本发明具有以下有益效果:
62、1. 省去了大量硬件,将硬件控制变为软件控制,优化电量算法与控制,减少无用功耗,特别是将传统的多点位置采集变为一个模块的电信号变化量采集,配合时间控制,从而简单电路,节约电量,压缩了电路及配套部件所占据的空间。
- 还没有人留言评论。精彩留言会获得点赞!