一种协作机器人内部防撞机构的制作方法
本技术涉及机器人防撞,尤其涉及一种协作机器人内部防撞机构。
背景技术:
1、中国专利公告号cn216707552u公开了一种多轴协作机器人防撞保护装置,涉及防撞结构技术领域,包括基座,基座的顶端设置有缓冲组件,缓冲组件的顶端设置有机体,机体的顶端设置有多轴机器人,机体的一端设置有防撞组件。该多轴协作机器人防撞保护装置解决了多轴协作机器人在移动的过程中经常会出现剐蹭的问题,导致机体受到撞击之后出现损坏的情况,导致多轴协作机器人使用寿命缩短的问题,实现对撞击时产生的冲击力的缓冲,避免撞击导致多轴机器人出现损坏的情况,延长了多轴机器人的使用寿命,实现对了多轴机器人保护。
2、但该装置在使用时存在以下缺陷:由于该装置在使用时只能对撞击时产生的冲击力进行单向的缓冲,且单向缓冲的防撞效果较低,从而无法更好的对协作机器人进行更好的防护。为此,我们提出一种防撞效果强的一种协作机器人防撞机构。
技术实现思路
1、本实用新型的目的在于提供一种协作机器人内部防撞机构,以解决上述背景技术中提出的问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
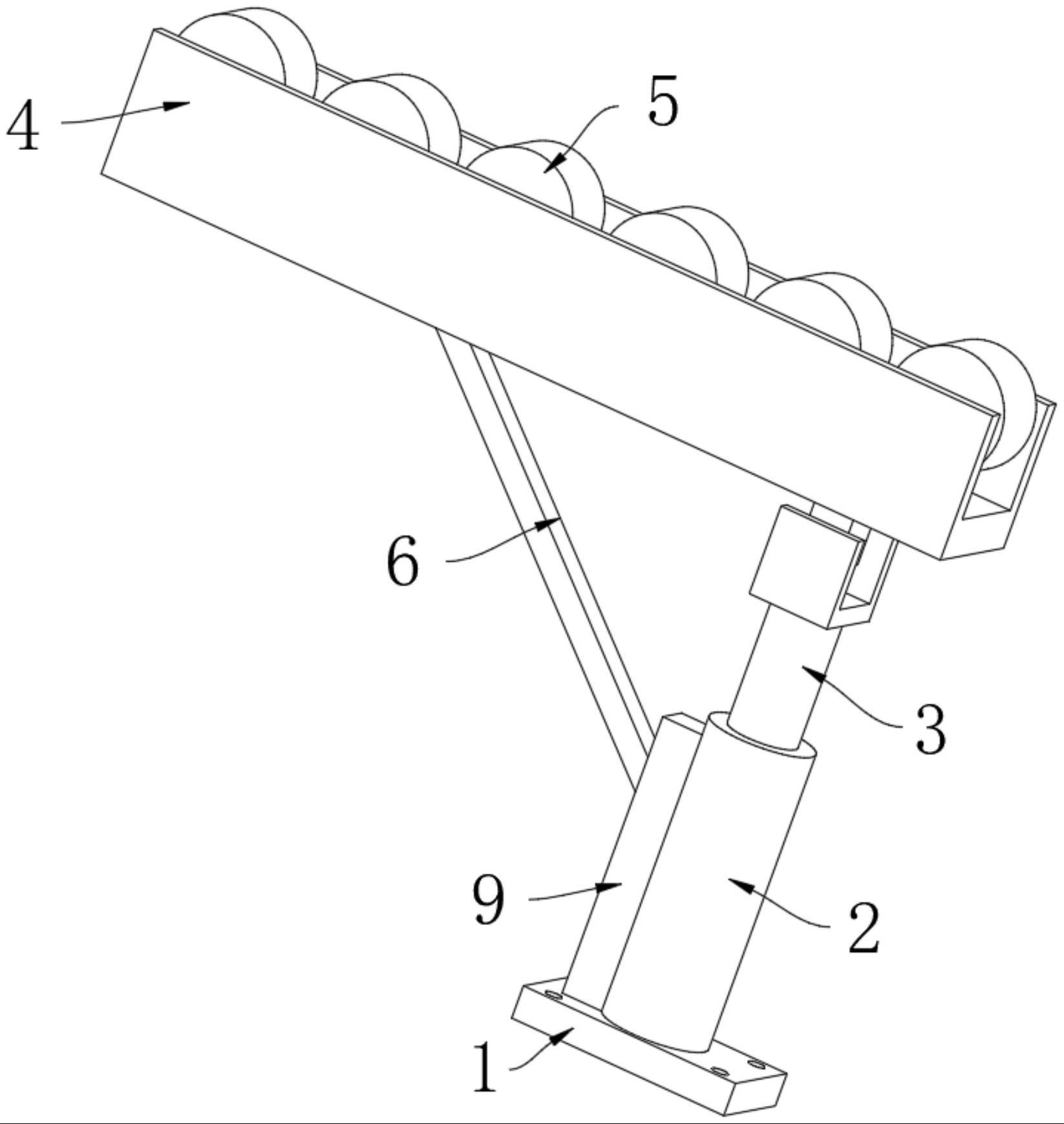
3、一种协作机器人内部防撞机构,包括安装板,所述安装板的上表面固定安装有伸缩筒,伸缩筒的内壁滑动连接有伸缩杆,伸缩杆的上端转动连接有安装框,安装框的内部设置有防撞组件,防撞组件由安装筒和防撞橡胶筒构成,安装框的表面设置有卸力组件,卸力组件由支撑杆、第一压缩弹簧和第二压缩弹簧构成。
4、优选地,所述伸缩筒的表面固定安装有衔接框,衔接框的内壁滑动连接有第一滑块,第一压缩弹簧的一端与第一滑块的下表面固定连接,第一压缩弹簧的另一端与衔接框的内底壁固定连接,支撑杆的一端与第一滑块的表面转动连接。
5、优选地,所述安装框的下表面开设有安装槽,安装槽的内壁滑动连接有第二滑块,第二压缩弹簧的一端与第二滑块的左侧面固定连接,第二压缩弹簧的另一端与安装槽的内左侧壁固定连接,且支撑杆的另一端与第二滑块的表面转动连接。
6、优选地,所述安装筒的正面和背面均开设有凹槽,凹槽的内壁滑动连接有限位块,安装框的内壁开设有与限位块相适配的限位槽。
7、优选地,所述凹槽的内壁设置有伸缩弹簧,伸缩弹簧的一端与限位块的一端固定连接,伸缩弹簧的另一端与凹槽的内壁固定连接。
8、优选地,所述防撞橡胶筒与安装筒的表面转动连接,伸缩筒的内壁设置有第三压缩弹簧,第三压缩弹簧的一端与伸缩筒的内壁固定连接,第三压缩弹簧的另一端与伸缩杆的下端固定连接。
9、本实用新型与现有技术相比具有以下优点:
10、1、本实用新型通过设置卸力组件,将安装板固定安装在协作机器人上,当外界物体撞击安装筒时,外部的撞击力会驱使安装框转动,且防撞橡胶筒会转动,从而可使支撑杆受力推动第一压缩弹簧和第二压缩弹簧收缩,从而可利用第一压缩弹簧和第二压缩弹簧卸力的同时改变撞击力的方向,且安装框受力时也会带动第三压缩弹簧收缩,从而可利用第三压缩弹簧进一步缓冲撞击力,进而提高了该装置的防撞效果。
11、2、本实用新型通过设置限位块,利用限位块插入限位槽内,从而可快速的将安装筒固定在安装框内部,同时推动限位块,使限位块缩进限位槽内,从而可快速的将安装筒拆卸,进而方便了安装筒的更换。
技术特征:
1.一种协作机器人内部防撞机构,包括安装板(1),其特征在于:所述安装板(1)的上表面固定安装有伸缩筒(2),伸缩筒(2)的内壁滑动连接有伸缩杆(3),伸缩杆(3)的上端转动连接有安装框(4),安装框(4)的内部设置有防撞组件,防撞组件由安装筒(12)和防撞橡胶筒(5)构成,安装框(4)的表面设置有卸力组件,卸力组件由支撑杆(6)、第一压缩弹簧(7)和第二压缩弹簧(8)构成。
2.根据权利要求1所述的一种协作机器人内部防撞机构,其特征在于:所述伸缩筒(2)的表面固定安装有衔接框(9),衔接框(9)的内壁滑动连接有第一滑块(10),第一压缩弹簧(7)的一端与第一滑块(10)的下表面固定连接,第一压缩弹簧(7)的另一端与衔接框(9)的内底壁固定连接,支撑杆(6)的一端与第一滑块(10)的表面转动连接。
3.根据权利要求1所述的一种协作机器人内部防撞机构,其特征在于:所述安装框(4)的下表面开设有安装槽,安装槽的内壁滑动连接有第二滑块(11),第二压缩弹簧(8)的一端与第二滑块(11)的左侧面固定连接,第二压缩弹簧(8)的另一端与安装槽的内左侧壁固定连接,且支撑杆(6)的另一端与第二滑块(11)的表面转动连接。
4.根据权利要求1所述的一种协作机器人内部防撞机构,其特征在于:所述安装筒(12)的正面和背面均开设有凹槽,凹槽的内壁滑动连接有限位块(13),安装框(4)的内壁开设有与限位块(13)相适配的限位槽。
5.根据权利要求4所述的一种协作机器人内部防撞机构,其特征在于:所述凹槽的内壁设置有伸缩弹簧(14),伸缩弹簧(14)的一端与限位块(13)的一端固定连接,伸缩弹簧(14)的另一端与凹槽的内壁固定连接。
6.根据权利要求1所述的一种协作机器人内部防撞机构,其特征在于:所述防撞橡胶筒(5)与安装筒(12)的表面转动连接,伸缩筒(2)的内壁设置有第三压缩弹簧(15),第三压缩弹簧(15)的一端与伸缩筒(2)的内壁固定连接,第三压缩弹簧(15)的另一端与伸缩杆(3)的下端固定连接。
技术总结
本技术公开了一种协作机器人内部防撞机构,包括安装板,所述安装板的上表面固定安装有伸缩筒,伸缩筒的内壁滑动连接有伸缩杆,伸缩杆的上端转动连接有安装框,安装框的内部设置有防撞组件,防撞组件由安装筒和防撞橡胶筒构成。本技术通过设置卸力组件,将安装板固定安装在协作机器人上,当外界物体撞击安装筒时,外部的撞击力会驱使安装框转动,且防撞橡胶筒会转动,从而可使支撑杆受力推动第一压缩弹簧和第二压缩弹簧收缩,从而可利用第一压缩弹簧和第二压缩弹簧卸力的同时改变撞击力的方向,且安装框受力时也会带动第三压缩弹簧收缩,从而可利用第三压缩弹簧进一步缓冲撞击力,进而提高了该装置的防撞效果。
技术研发人员:穆子健
受保护的技术使用者:青岛拓朴智能科技有限公司
技术研发日:20230328
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!