一种五轴伺服机械手的制作方法
本技术涉及机械手,具体为一种五轴伺服机械手。
背景技术:
1、在现今的生活里,科技日新月异的进展,机械人手臂与有人类的手臂最大区别就在于灵活度与耐力度。也就是机械手的最大优势可以重复的做同一动作在机械正常情况下永远也不会觉得累,机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力强,工业机械手是机器人的一个重要分支。
2、五轴伺服机械手大多都是以伺服控制器与控制系统分离的方式进行运作的,伺服控制器与控制系统按照不同的控制方式对机器人进行控制。这种将伺服控制器和控制系统按照不同的控制方式对机器人进行控制的方式使得控制相对复杂,整体设备大且笨重,且设备的散热效果也不理想。
技术实现思路
1、本实用新型的目的在于提供一种五轴伺服机械手,以解决上述背景技术中提出的传统的伺服控制器和控制系统按照不同的控制方式对机器人进行控制的方式使得控制相对复杂,整体设备大且笨重,且设备的散热效果也不理想的问题。
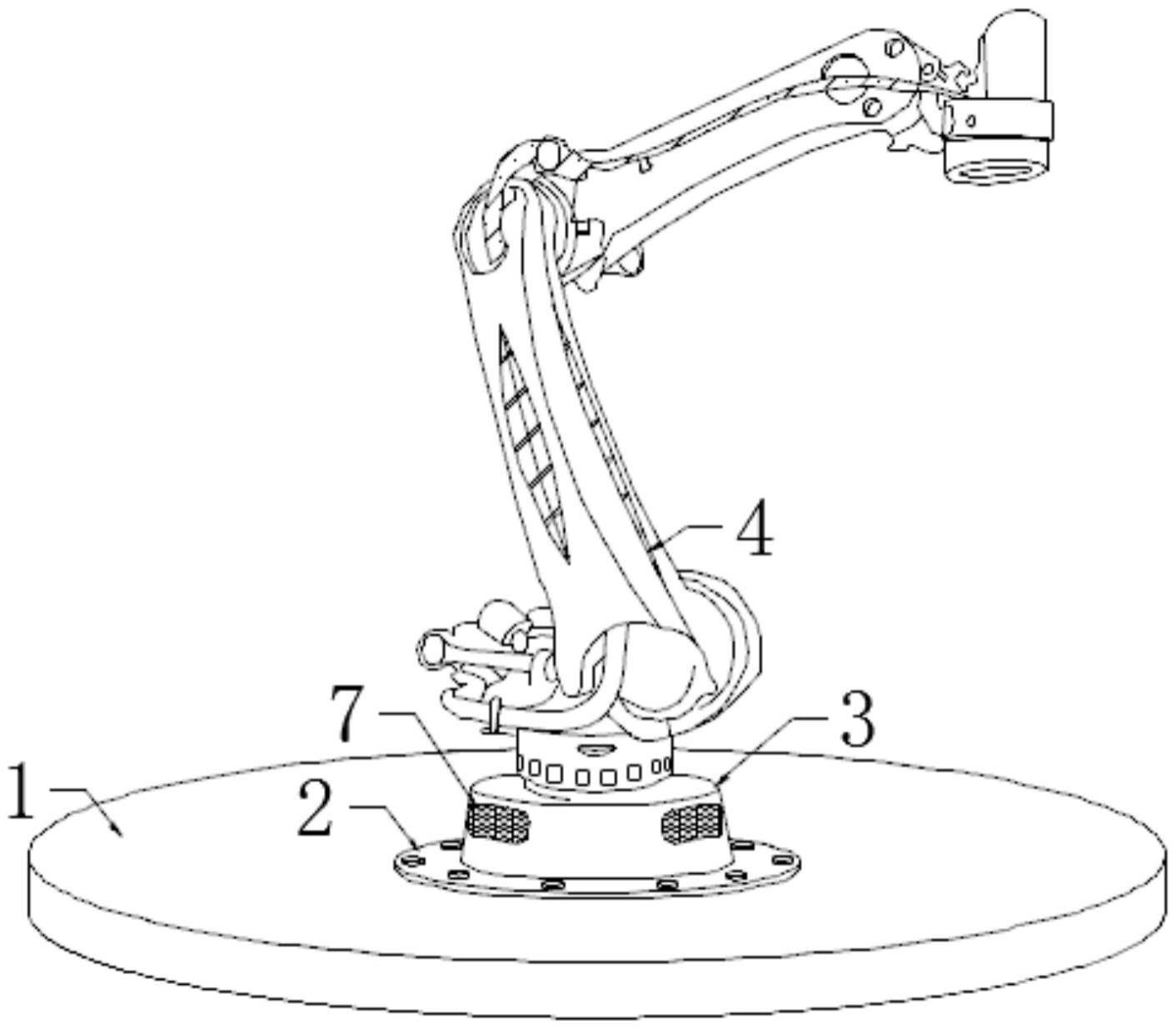
2、为实现上述目的,本实用新型提供如下技术方案:一种五轴伺服机械手,包括五轴伺服机械手本体,所述五轴伺服机械手本体的底部固定连接有底座,所述底座的底部固定连接有法兰,所述底座通过法兰固定连接有固定盘,所述底座的内部固定安装有驱控一体机构,所述驱控一体机构包括电控箱,所述电控箱内腔的一侧固定安装有开关电源,所述电控箱的另一侧固定连接有安装架,所述安装架的内腔从上到下依次固定安装有功率板、控制板和输入输出板,所述电控箱的顶部镶嵌有散热筒,所述散热筒的内腔从下到上依次固定安装有导热板、半导体制冷片、散热翅片和散热风扇,所述电控箱的正面镶嵌有面板组件,安装架对功率板、控制板和输入输出板进行叠加安装,更省空间,安装架、功率板和输入输出板等的设置可以能将伺服控制器和控制系统等集合在一起,从而满足使用需求,面板组件方便接线与显示。
3、优选的,所述底座的表面等距开设有若干散热孔,所述散热孔的内腔卡接有隔离网,方便热气的散出,形成循环。
4、优选的,所述半导体制冷片的顶部通过导热硅胶与散热翅片的底部粘接,所述半导体制冷片的底部通过导热硅胶与导热板的顶部粘接,通过导热硅胶将三者进行连接,使得导热效果更好。
5、优选的,所述散热筒内腔的一侧固定安装有温控开关,且所述半导体制冷片和散热风扇均通过温控开关与外接电源电性连接,对半导体制冷片和散热风扇进行开关控制。
6、优选的,所述功率板、面板组件和输入输出板均与控制板电性连接,所述面板组件的一侧固定安装有开关按钮,且所述控制板通过开关按钮和开关电源与外接电源电性连接。
7、优选的,所述散热筒的顶部卡接有防护网,所述导热板的底端与功率板的表面接触,防护网用于对散热筒的顶部进行防护隔离,导热板的底端与功率板的表面接触便于导热。
8、与现有技术相比,本实用新型的有益效果是:
9、(1)通过将开关电源、安装架、功率板和输入输出板集成在电控箱的内腔,安装架、功率板和输入输出板等的设置可以将伺服控制器和控制系统等集合在一起,从而满足驱控一体的使用需求,又能节省设备的占地空间,实现了电控箱的小型化;
10、(2)通过导热板将功率板表面的热量传导至半导体制冷片的制冷端进行冷热置换,半导体制冷片散热端的热量传递至散热翅片的表面,然后再通过散热风扇进行散热,从而达到为电控箱的内腔降温的目的,提高驱控一体机构的散热性能。
技术特征:
1.一种五轴伺服机械手,包括五轴伺服机械手本体(4),其特征在于:所述五轴伺服机械手本体(4)的底部固定连接有底座(3),所述底座(3)的底部固定连接有法兰(2),所述底座(3)通过法兰(2)固定连接有固定盘(1),所述底座(3)的内部固定安装有驱控一体机构(5),所述驱控一体机构(5)包括电控箱(8),所述电控箱(8)内腔的一侧固定安装有开关电源(9),所述电控箱(8)的另一侧固定连接有安装架(10),所述安装架(10)的内腔从上到下依次固定安装有功率板(11)、控制板(12)和输入输出板(13),所述电控箱(8)的顶部镶嵌有散热筒(14),所述散热筒(14)的内腔从下到上依次固定安装有导热板(15)、半导体制冷片(16)、散热翅片(17)和散热风扇(18),所述电控箱(8)的正面镶嵌有面板组件(20)。
2.根据权利要求1所述的一种五轴伺服机械手,其特征在于:所述底座(3)的表面等距开设有若干散热孔(6),所述散热孔(6)的内腔卡接有隔离网(7)。
3.根据权利要求1所述的一种五轴伺服机械手,其特征在于:所述半导体制冷片(16)的顶部通过导热硅胶与散热翅片(17)的底部粘接,所述半导体制冷片(16)的底部通过导热硅胶与导热板(15)的顶部粘接。
4.根据权利要求1所述的一种五轴伺服机械手,其特征在于:所述散热筒(14)内腔的一侧固定安装有温控开关(19),且所述半导体制冷片(16)和散热风扇(18)均通过温控开关(19)与外接电源电性连接。
5.根据权利要求1所述的一种五轴伺服机械手,其特征在于:所述功率板(11)、面板组件(20)和输入输出板(13)均与控制板(12)电性连接,所述面板组件(20)的一侧固定安装有开关按钮(21),且所述控制板(12)通过开关按钮(21)和开关电源(9)与外接电源电性连接。
6.根据权利要求1所述的一种五轴伺服机械手,其特征在于:所述散热筒(14)的顶部卡接有防护网(22),所述导热板(15)的底端与功率板(11)的表面接触。
技术总结
本技术公开了一种五轴伺服机械手,包括五轴伺服机械手本体,五轴伺服机械手本体的底部固定连接有底座,底座通过法兰固定连接有固定盘,底座的内部固定安装有驱控一体机构,电控箱的另一侧固定连接有安装架,安装架的内腔从上到下依次固定安装有功率板、控制板和输入输出板,电控箱的顶部镶嵌有散热筒,散热筒的内腔从下到上依次固定安装有导热板、半导体制冷片、散热翅片和散热风扇,本技术一种五轴伺服机械手,通过将开关电源、安装架、功率板和输入输出板集成在电控箱的内腔,安装架、功率板和输入输出板等的设置可以能将伺服控制器和控制系统等集合在一起,从而满足驱控一体的使用需求,实现了电控箱的小型化。
技术研发人员:吴峻睿,冷三丰,李方,李春业,谢仲铭
受保护的技术使用者:东莞信易电热机械有限公司
技术研发日:20230421
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!