一种多角度机械手夹取工装的制作方法
本技术涉及机械手夹取装置,具体地说是一种结构简单、小巧紧凑、占用空间小、能实现多角度旋转的多角度机械手夹取工装。
背景技术:
1、众所周知,随着电子化设备的增加,自动化设备具备的多角度旋转的机械手是自动化设备中重要的机械,其以动作灵活,方便使用而广为利用,目前,常见的机械手前端的夹取工装一般都是通过气缸带动实现90°翻转,可以满足基本的动作需求,对于相对复杂的工作环境,机械手臂需要更多旋转动作来完成,为了实现其多角度的夹取方式,一般机械手的夹取工装设计的体积大,非常占用空间。
技术实现思路
1、本实用新型的目的是解决上述现有技术的不足,提供一种结构简单、小巧紧凑、占用空间小、能实现多角度旋转的多角度机械手夹取工装。
2、本实用新型解决其技术问题所采用的技术方案是:
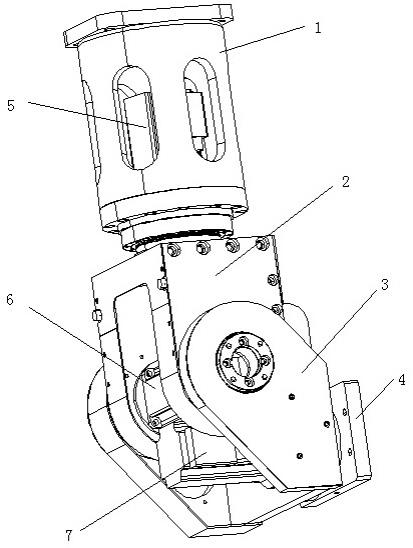
3、一种多角度机械手夹取工装,设有连接臂,其特征在于连接臂上连接旋转组件,所述的旋转组件包括上连接架、下连接架、夹取板、第一电机、第二电机和第三电机,所述的连接臂设为筒状,第三电机固定筒状的连接臂内,第三电机的输出轴穿过连接臂与上连接架固定连接,上连接架内固定安装第二电机,第二电机输出轴与第一电机输出轴垂直,第二电机输出轴伸出上连接架与下连接架相铰接,下连接架内固定安装第三电机,第三电机的输出轴与第二电机输出轴垂直,第三电机的输出轴穿过下连接接与夹取板连接。
4、本实用新型所述的上连接架和下连接架设为u型,u型的上连接架由两个上侧板和一个上横板组成,上横板的两端与上侧板连接,所述的第一电机的输出轴与上横板固定连接,两个上侧板的下端之间固定第二电机,u型的下连接架由两个下侧板和一个下横板组成,下横板的两端分别与下侧板连接,下侧板套在上侧板的外侧,第二电机的输出轴穿过一侧的下侧板与上侧板连接,另一侧的下侧板与上侧板经铰轴铰接,第三电机的输出轴穿过下横板与夹取板连接。
5、本实用新型所述的第三电机设在第二电机的正下方,减小空间。
6、本实用新型所述的下连接架的下侧板设为倾斜状,下侧板的下端与下横板连接,下侧板的上端朝向侧面倾斜并与上侧板铰接,下侧板与下横板之间倾斜角度为45°。
7、本实用新型所述的倾斜状的下侧板的两侧分为短边部和长边部,所述的短边部一侧的上侧板上设有限位板,限位板与上侧板固定连接,通过限位板限制下连接架的旋转角度。
8、本实用新型由于采用上述结构,具有结构简单、小巧紧凑、占用空间小、能实现多角度旋转等优点。
技术特征:
1.一种多角度机械手夹取工装,设有连接臂,其特征在于连接臂上连接旋转组件,所述的旋转组件包括上连接架、下连接架、夹取板、第一电机、第二电机和第三电机,所述的连接臂设为筒状,第三电机固定筒状的连接臂内,第三电机的输出轴穿过连接臂与上连接架固定连接,上连接架内固定安装第二电机,第二电机输出轴与第一电机输出轴垂直,第二电机输出轴伸出上连接架与下连接架相铰接,下连接架内固定安装第三电机,第三电机的输出轴与第二电机输出轴垂直,第三电机的输出轴穿过下连接接与夹取板连接。
2.根据权利要求1所述的一种多角度机械手夹取工装,其特征在于所述的上连接架和下连接架设为u型,u型的上连接架由两个上侧板和一个上横板组成,上横板的两端与上侧板连接,所述的第一电机的输出轴与上横板固定连接,两个上侧板的下端之间固定第二电机,u型的下连接架由两个下侧板和一个下横板组成,下横板的两端分别与下侧板连接,下侧板套在上侧板的外侧,第二电机的输出轴穿过一侧的下侧板与上侧板连接,另一侧的下侧板与上侧板经铰轴铰接,第三电机的输出轴穿过下横板与夹取板连接。
3.根据权利要求1所述的一种多角度机械手夹取工装,其特征在于所述的第三电机设在第二电机的正下方。
4.根据权利要求2所述的一种多角度机械手夹取工装,其特征在于所述的下连接架的下侧板设为倾斜状,下侧板的下端与下横板连接,下侧板的上端朝向侧面倾斜并与上侧板铰接,下侧板与下横板之间倾斜角度为45°。
5.根据权利要求4所述的一种多角度机械手夹取工装,其特征在于所述的倾斜状的下侧板的两侧分为短边部和长边部,所述的短边部一侧的上侧板上设有限位板,限位板与上侧板固定连接,通过限位板限制下连接架的旋转角度。
技术总结
本技术涉及机械手夹取装置技术领域,具体地说是一种多角度机械手夹取工装,设有连接臂,其特征在于连接臂上连接旋转组件,所述的旋转组件包括上连接架、下连接架、夹取板、第一电机、第二电机和第三电机,所述的连接臂设为筒状,第三电机固定筒状的连接臂内,第三电机的输出轴穿过连接臂与上连接架固定连接,上连接架内固定安装第二电机,第二电机输出轴与第一电机输出轴垂直,第二电机输出轴伸出上连接架与下连接架相铰接,下连接架内固定安装第三电机,第三电机的输出轴与第二电机输出轴垂直,第三电机的输出轴穿过下连接接与夹取板连接,具有结构简单、小巧紧凑、占用空间小、能实现多角度旋转等优点。
技术研发人员:姜红莎
受保护的技术使用者:威海柳道机械有限公司
技术研发日:20230607
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!