腕关节及机械臂的制作方法
本公开涉及一种腕关节及机械臂,属于机器人。
背景技术:
1、人体的腕关节具有两个旋转自由度,由此能够使得人体的手柄具有较大的灵活性。
2、仿人机器人在设计腕关节时,也需要具备两个转动自由度。但是设计出紧凑、灵活、承载能力大的腕关节具有很大挑战。
3、现有的技术方案有圆柱形模块化关节型腕关节、直线驱动装置驱动的腕关节等。模块化关节型腕关节的两个旋转自由度一般距离较远,与人体腕关节两个旋转自由度轴线相交的特点有较大差异;直线驱动装置驱动的机器人腕关节可以做到两个旋转自由度轴线相交或距离较短,然而通过该方案的腕关节运动和驱动力矩与直线驱动装置的运动和输出力称非线性关系,给关节的运动控制带来一定挑战,关节的输出力矩受限。
技术实现思路
1、为了解决上述技术问题之一,本公开提供了一种腕关节及机械臂。
2、根据本公开的一个方面,提供了一种腕关节,其包括:
3、第一连杆;
4、第二连杆,所述第二连杆被设置为能够相对于第一连杆,沿第一轴线转动;
5、法兰部,所述法兰部被设置为能够相对于所述第二连杆,沿第二轴线转动,其中,所述第一轴线和第二轴线不平行;
6、第一回转体,所述第一回转体可转动地设置于所述第一连杆,并且所述第二连杆固定于所述第一回转体;其中,所述第一回转体的转动轴线为所述第一轴线;
7、第二回转体,所述第二回转体可转动地设置于所述第二连杆,并且所述法兰部固定于所述第二回转体,其中,所述第二回转体的转动轴线为所述第二轴线;
8、第一驱动部,所述第一驱动部用于驱动所述第一回转体转动;以及
9、第二驱动部,所述第二驱动部用于驱动所述第二回转体转动,其中,所述第二驱动部的转动轴线为所述第一轴线。
10、根据本公开的至少一个实施方式的腕关节,所述第一驱动部为第一蜗杆,所述第一蜗杆可转动地设置于所述第一连杆;所述第一回转体为第一蜗轮,所述第一蜗杆与所述第一蜗轮啮合。
11、根据本公开的至少一个实施方式的腕关节,所述第一蜗轮为整圆的蜗轮。
12、根据本公开的至少一个实施方式的腕关节,所述第二驱动部可转动地设置于所述第二连杆。
13、根据本公开的至少一个实施方式的腕关节,所述第二驱动部为第二蜗杆,所述第二回转体为第二蜗轮,所述第二蜗杆与所述第二蜗轮啮合。
14、根据本公开的至少一个实施方式的腕关节,所述第二回转体为半圆的蜗轮或者多半圆的蜗轮。
15、根据本公开的至少一个实施方式的腕关节,所述第一回转体通过交叉滚子轴承可转动地设置于所述第一连杆。
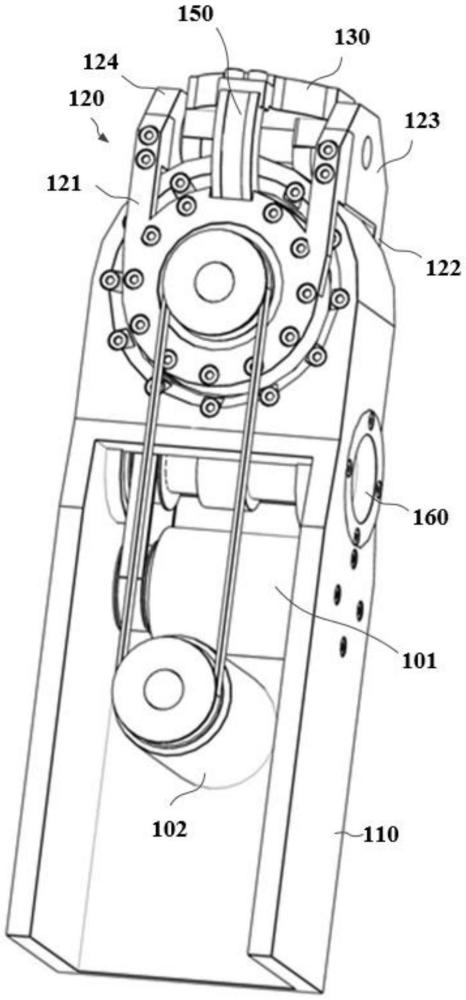
16、根据本公开的至少一个实施方式的腕关节,所述第一回转体为从动同步带轮,所述第一驱动部为主动同步带轮,所述主动同步带轮与所述从动同步带轮之间通过同步带传动连接。
17、根据本公开的至少一个实施方式的腕关节,所述法兰部通过转轴可转动地设置于所述第二连杆,其中,所述转轴与所述法兰部之间设置有衬套。
18、根据本公开的另一方面,提供一种机械臂,其包括上述的腕关节。
技术特征:
1.一种腕关节,其特征在于,包括:
2.根据权利要求1所述的腕关节,其特征在于,所述第一驱动部为第一蜗杆,所述第一蜗杆可转动地设置于所述第一连杆;所述第一回转体为第一蜗轮,所述第一蜗杆与所述第一蜗轮啮合。
3.根据权利要求2所述的腕关节,其特征在于,所述第一蜗轮为整圆的蜗轮。
4.根据权利要求1所述的腕关节,其特征在于,所述第二驱动部可转动地设置于所述第二连杆。
5.根据权利要求4所述的腕关节,其特征在于,所述第二驱动部为第二蜗杆,所述第二回转体为第二蜗轮,所述第二蜗杆与所述第二蜗轮啮合。
6.根据权利要求5所述的腕关节,其特征在于,所述第二回转体为半圆的蜗轮或者多半圆的蜗轮。
7.根据权利要求1所述的腕关节,其特征在于,所述第一回转体通过交叉滚子轴承可转动地设置于所述第一连杆。
8.根据权利要求1所述的腕关节,其特征在于,所述第一回转体为从动同步带轮,所述第一驱动部为主动同步带轮,所述主动同步带轮与所述从动同步带轮之间通过同步带传动连接。
9.根据权利要求1所述的腕关节,其特征在于,所述法兰部通过转轴可转动地设置于所述第二连杆,其中,所述转轴与所述法兰部之间设置有衬套。
10.一种机械臂,其特征在于,包括权利要求1-9中任一项所述的腕关节。
技术总结
本公开提供一种腕关节,其包括:第一连杆;第二连杆,该第二连杆被设置为能够相对于第一连杆沿第一轴线转动;法兰部,该法兰部被设置为能够相对于所述第二连杆沿第二轴线转动,第一回转体,所述第一回转体可转动地设置于所述第一连杆,并且所述第二连杆固定于所述第一回转体;其中,所述第一回转体的转动轴线为所述第一轴线;第二回转体,所述第二回转体可转动地设置于所述第二连杆,并且所述法兰部固定于所述第二回转体,其中,所述第二回转体的转动轴线为所述第二轴线;第一驱动部,所述第一驱动部用于驱动所述第一回转体转动;以及第二驱动部,所述第二驱动部用于驱动所述第二回转体转动,其中,所述第二驱动部的转动轴线为所述第一轴线。
技术研发人员:张庆超,祝汉歧,王倩
受保护的技术使用者:北京思灵机器人科技有限责任公司
技术研发日:20230915
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!