一种适用于除锈的机器人的制作方法
本技术涉及机器人,尤其涉及一种适用于除锈的机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
2、但是现有除锈的机器人在使用过程中,往往不能够对不同高度的处理面进行除锈作业,不适用于不同的工作环境,从而导致使用效果欠佳。
技术实现思路
1、本实用新型的目的是解决现有技术中存在不能够对不同高度的处理面进行除锈作业,不适用于不同的工作环境,从而导致使用效果欠佳的问题,而提出的一种适用于除锈的机器人。
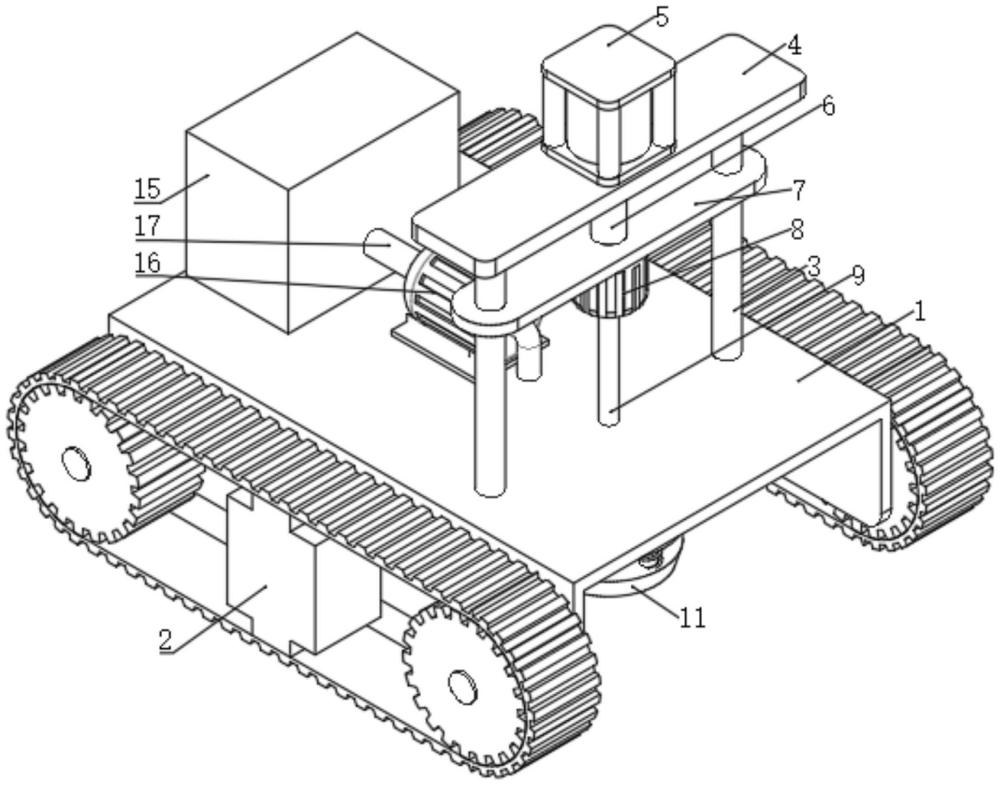
2、为了实现上述目的,本实用新型采用了如下技术方案:一种适用于除锈的机器人,包括基座,所述基座的两侧均设置有履带式行走机构,所述基座的顶部固定连接有支撑杆,所述支撑杆的顶端固定连接有安装板,所述安装板的顶部设置有压缸,所述压缸的输出端贯穿安装板,所述压缸的输出端固定连接有液压杆,所述液压杆的一端设置有连接板,所述连接板的底部固定安装有驱动电机,所述驱动电机的输出端固定连接有转轴,且转轴贯穿基座,所述转轴的一端设置有弹性组件,所述弹性组件的底部设置有打磨除锈盘。
3、优选的,所述弹性组件包括连接盘,所述连接盘固定连接于转轴的一端。
4、优选的,所述连接盘的底部固定连接有伸缩杆,所述伸缩杆的外壁套设有复位弹簧,且打磨除锈盘固定连接于伸缩杆的一端。
5、优选的,所述连接板套设于支撑杆的外壁,所述连接板与支撑杆滑动连接,且连接板固定连接于液压杆的一端。
6、优选的,所述基座的顶部固定连接有储水箱,所述基座的顶部固定安装有高压水泵。
7、优选的,所述储水箱的一侧固定连通有抽水硬管,且抽水硬管远离储水箱的一端与高压水泵的抽水端固定连通。
8、优选的,所述高压水泵的出水端固定连通有出水硬管,且出水硬管贯穿基座,所述出水硬管远离高压水泵的一端设置有高压喷头。
9、与现有技术相比,本实用新型的优点和积极效果在于,
10、1、本实用新型中,通过启动压缸,使得液压杆带动连接板上下移动,进而使得带动打磨除锈盘上下移动,便于调节打磨除锈盘的高度,适应不同的工作环境,将打磨除锈盘调节到合适的高度后,再启动驱动电机,进而使得带动打磨除锈盘转动进行除锈,解决了现有除锈的机器人在使用过程中,往往不能够对不同高度的处理面进行除锈作业,不适用于不同工作环境的问题。
11、2、本实用新型中,通过设置的弹性机构,使得在复位弹簧的弹力作用下,使得打磨除锈盘与待处理面进行弹性接触,从而提高了打磨除锈盘的使用寿命,再通过启动高压水泵,使得高压水泵抽取储水箱内的清洗液再经高压喷头进行喷出,便于对除锈后的处理面进行清理。
技术特征:
1.一种适用于除锈的机器人,包括基座(1),其特征在于:所述基座(1)的两侧均设置有履带式行走机构(2),所述基座(1)的顶部固定连接有支撑杆(3),所述支撑杆(3)的顶端固定连接有安装板(4),所述安装板(4)的顶部设置有压缸(5),所述压缸(5)的输出端贯穿安装板(4),所述压缸(5)的输出端固定连接有液压杆(6),所述液压杆(6)的一端设置有连接板(7),所述连接板(7)的底部固定安装有驱动电机(8),所述驱动电机(8)的输出端固定连接有转轴(9),且转轴(9)贯穿基座(1),所述转轴(9)的一端设置有弹性组件(10),所述弹性组件(10)的底部设置有打磨除锈盘(11)。
2.根据权利要求1所述的一种适用于除锈的机器人,其特征在于:所述弹性组件(10)包括连接盘(12),所述连接盘(12)固定连接于转轴(9)的一端。
3.根据权利要求2所述的一种适用于除锈的机器人,其特征在于:所述连接盘(12)的底部固定连接有伸缩杆(13),所述伸缩杆(13)的外壁套设有复位弹簧(14),且打磨除锈盘(11)固定连接于伸缩杆(13)的一端。
4.根据权利要求1所述的一种适用于除锈的机器人,其特征在于:所述连接板(7)套设于支撑杆(3)的外壁,所述连接板(7)与支撑杆(3)滑动连接,且连接板(7)固定连接于液压杆(6)的一端。
5.根据权利要求1所述的一种适用于除锈的机器人,其特征在于:所述基座(1)的顶部固定连接有储水箱(15),所述基座(1)的顶部固定安装有高压水泵(16)。
6.根据权利要求5所述的一种适用于除锈的机器人,其特征在于:所述储水箱(15)的一侧固定连通有抽水硬管(17),且抽水硬管(17)远离储水箱(15)的一端与高压水泵(16)的抽水端固定连通。
7.根据权利要求5所述的一种适用于除锈的机器人,其特征在于:所述高压水泵(16)的出水端固定连通有出水硬管(18),且出水硬管(18)贯穿基座(1),所述出水硬管(18)远离高压水泵(16)的一端设置有高压喷头(19)。
技术总结
本技术提供一种适用于除锈的机器人,涉及机器人技术领域,包括基座,所述基座的两侧均设置有履带式行走机构,所述基座的顶部固定连接有支撑杆,所述支撑杆的顶端固定连接有安装板,所述安装板的顶部设置有压缸,所述压缸的输出端贯穿安装板,所述压缸的输出端固定连接有液压杆。本技术中,通过启动压缸,使得液压杆带动连接板上下移动,进而使得带动打磨除锈盘上下移动,便于调节打磨除锈盘的高度,适应不同的工作环境,将打磨除锈盘调节到合适的高度后,再启动驱动电机,进而使得带动打磨除锈盘转动进行除锈,解决了现有除锈的机器人在使用过程中,往往不能够对不同高度的处理面进行除锈作业,不适用于不同工作环境的问题。
技术研发人员:郑文博
受保护的技术使用者:郑文博
技术研发日:20231013
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!