一种基于多孔结构的柔性体相互连接结构及成型方法
本发明属于柔性材料相关,更具体地,涉及一种基于多孔结构的柔性体相互连接结构及成型方法。
背景技术:
1、软体机器人凭借其柔顺性和良好的顺应性,在医疗、教育、服务、救援、探索、探测、可穿戴设备等领域越来越受到重视,并显示出巨大的发展潜力。随着软体机器人系统结构和功能的复杂化,模块化设计逐渐成为一种趋势,不同模块之间连接成为软体机器人的关键技术。
2、机械连接在软体机器人模块中的应用十分广泛,但传统的机械连接大多使用刚性部件,因此对软体机器人的柔顺性具有一定的影响。于是像柔性机械连接、柔性材料黏附以及柔性静电吸附和真空吸附等一些新的连接方式被提出并应用于软体机器人模块之间的结构连接。柔性材料黏附可以通过黏性材料,如胶粘、热熔材料,如热熔粘接,以及微结构,如尼龙搭扣微结构勾连等实现,是柔性体连接的常用方式,但黏性材料和热熔材料均会引入除两块柔性连接体本身以外的第三种材料,使用场景会受到温湿度等多方面因素影响,微结构如尼龙扣则连接强度有限,但这些柔性连接方式也存在连接强度有限、使用场景受限等问题。由于硅橡胶等有机软材料在软体机器人等柔性体中的广泛使用,铸模成型、3d打印、激光成型等方法被应用于柔性体的制造工艺中。软材料凭借这些加工方式能形成复杂的结构。
3、因此,亟需一种能实现柔性材料件的柔性连接的结构和成型方法去解决上述问题。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种基于多孔结构的柔性体相互连接结构及成型方法,解决柔性体柔性连接的问题。
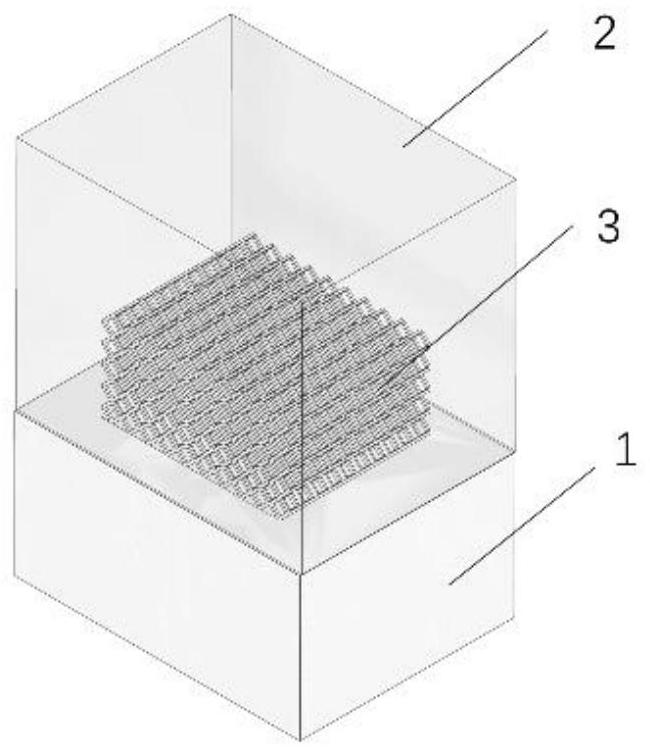
2、为实现上述目的,按照本发明的一个方面,提供了一种基于多孔结构的柔性体相互连接结构,该结构包括第一柔性体和第二柔性体,所述第一柔性体中设置有三维网状多孔结构,所述第二柔性体通过填充在所述第一柔性体的多孔结构中实现与所述第一柔性体的连接,以此形成柔性体相互连接结构。
3、进一步优选地,所述第一柔性体材料为铂催化硅橡胶、聚二甲基硅氧烷、水凝胶或热可塑性聚氨酯(tpu)…。
4、进一步优选地,所述第二柔性体材料为铂催化硅橡胶、聚二甲基硅氧烷、水凝胶。
5、进一步优选地,所述第一柔性体和第二柔性体中可设置有电子元件。
6、进一步优选地,所述三维网状多孔结构的孔隙率为30%~70%。
7、按照本发明的另一个方面,提供了一种上述所述的基于多孔结构的柔性体相互连接结构的成型方法,该方法包括下列步骤:
8、s1采用浇筑法或非浇筑法成型设置有三维网状多孔结构的第一柔性体;
9、s2在所述第一柔性体中浇筑所述第二柔性体的材料,固化后获得所需的柔性相互连接结构。
10、进一步优选地,所述非浇筑法采用3d打印成型、激光加工成型或自生长成型。
11、进一步优选地,所述浇筑法采用晶体模板法或支架法浇筑成型。
12、进一步优选地,所述晶体模板法中采用的晶体颗粒为可溶于水的糖、盐、可溶于四氯化碳的碘中的一种或多种的组合。
13、进一步优选地,所述支架法中支架的材料包括为高冲击聚苯乙烯、丙烯腈-丁二烯-苯乙烯、聚乙烯醇丁酸酯或聚乙烯醇,对应的溶解液主要成分分别为柠烯、丙酮、异丙醇和水。
14、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具备下列有益效果:
15、1.本发明利用柔性体本身材料进行连接,使用场景不受限,且通过三维网状多孔结构保障良好连接强度,保证本体柔顺性;与常用的粘接相比,利用柔性体本体材料进行连接,无需引入粘合剂,使用场景无需受限于粘合剂材料,依靠硅橡胶材料固化后交织的多孔结构相连形成可靠连接;
16、2.本发明的第一柔性体选择的材料中铂催化硅橡胶、聚二甲基硅氧烷、水凝胶材料均具有良好的柔性和弹性,可以适应各种形状和表面,适合通过浇筑定制化成型多样化的柔性基体,此外铂催化硅橡胶还具有良好的耐磨损性能,可以承受摩擦,具有很好的耐久性,聚二甲基硅氧烷具有可调节的杨氏模量和优良的化学稳定性,这些使得材料适用于多种应用场景。而热可塑性聚氨酯具有高弹性、耐化学腐蚀的特点,适合应用于在3d打印中成型不同形状结构的柔性基体,第二柔性体主要采用浇筑成型,暂时不考虑采用热可塑性聚氨酯;
17、3.本发明中三维网状多孔结构的总孔隙率为30%~70%,该孔隙率保证了第一柔性体和第二柔性体在三维网状连接结构中的体积比及接触面积,有利于形成稳定的柔性连接体,对于内部实际的孔隙分布,还可根据实际需求设置不同程度的梯度分布;
18、4.本发明提供的柔性体连接方式,不仅仅适用于两种柔性体的连接,该连接方式也适用于空间多种柔性体的空间互联;利用多步浇筑成型的方法不仅能使复杂的结构划分为多个简单的结构,从而降低了模具的设计制作难度;
19、5.本发明提供的基于多孔结构的柔性体相互连接结构在软体机器人领域应用,对于无法一体化制造、需多模块组装的软体机器人,可实现不同软体材料所制成的模块之间的可靠连接,并有利于在机器人本体上连接如传感器等电子元件的功能模块。
技术特征:
1.一种基于多孔结构的柔性体相互连接结构,其特征在于,该结构包括第一柔性体和第二柔性体,所述第一柔性体中设置有三维网状多孔结构,所述第二柔性体通过填充在所述第一柔性体的多孔结构中实现与所述第一柔性体的连接,以此形成柔性体相互连接结构。
2.如权利要求1所述的一种基于多孔结构的柔性体相互连接结构,其特征在于,所述第一柔性体为铂催化硅橡胶、聚二甲基硅氧烷、水凝胶或热可塑性聚氨酯。
3.如权利要求1所述的一种基于多孔结构的柔性体相互连接结构,其特征在于,所述第二柔性体为铂催化硅橡胶、聚二甲基硅氧烷或水凝胶。
4.如权利要求1所述的一种基于多孔结构的柔性体相互连接结构,其特征在于,所述三维网状多孔结构的总孔隙率为30%~70%。
5.一种权利要求1-4任一项所述的基于多孔结构的柔性体相互连接结构在软体机器人中的应用。
6.一种权利要求1-4任一项所述的基于多孔结构的柔性体相互连接结构的成型方法,其特征在于,该方法包括下列步骤:
7.如权利要求6所述的成型方法,其特征在于,所述非浇筑法采用3d打印成型、激光加工成型或自生长成型。
8.如权利要求6所述的成型方法,其特征在于,所述浇筑法采用晶体模板法或支架法浇筑成型。
9.如权利要求8所述的成型方法,其特征在于,所述晶体模板法中采用的晶体颗粒为可溶于水的糖、盐、可溶于四氯化碳的碘中的一种或多种的组合。
10.如权利要求8所述的成型方法,其特征在于,所述支架法中支架的材料包括为高冲击聚苯乙烯、丙烯腈-丁二烯-苯乙烯、聚乙烯醇丁酸酯或聚乙烯醇,对应的溶解液主要成分分别为柠烯、丙酮、异丙醇和水。
技术总结
本发明属于柔性材料相关技术领域,并公开了一种基于多孔结构的柔性体相互连接结构及成型方法。该结构包括第一柔性体和第二柔性体,所述第一柔性体中设置有三维网状多孔结构,所述第二柔性体通过填充在所述第一柔性体的多孔结构中实现与所述第一柔性体的连接,以此形成柔性体相互连接结构。本发明还公开了上述柔性体结构的成型方法。通过本发明,利用柔性体本体材料进行连接,无需引入粘合剂,使用场景无需受限于粘合剂材料,依靠硅橡胶材料固化后交织的多孔结构相连形成可靠连接。
技术研发人员:郭家杰,陈艺彬,白宇轩,夏俊杰,刘子杰,郭楚璇,刘宇超,吴暄
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!