一种基于人工智能的综合管廊巡检机器人的制作方法
本发明涉及巡检风险定位,具体是一种基于人工智能的综合管廊巡检机器人。
背景技术:
1、随着城市化进程的加快,综合管廊作为城市基础设施的重要组成部分,其安全运行对于城市的正常运行至关重要;传统的综合管廊巡检方法主要依赖于人工巡检,存在效率低、成本高、安全隐患大等问题;
2、而目前随着机器人技术的进步,巡检机器人在综合管廊中得到了广泛的应用,巡检机器人不仅可以实现全天候、无死角的巡检,提高巡检的效率和准确性,还可以实时监控管廊的运行状态,及时发现并预警潜在的问题;此外,机器人还可以减少人工成本,降低人员安全风险,并通过收集和分析大量数据,为管廊的维护和管理提供科学依据。最重要的是,巡检机器人具有很强的适应性,能够在各种复杂和恶劣的环境下正常工作,确保了巡检的质量和效果;
3、然而目前的巡检机器人在巡检时,往往是使用各项参数的阈值进行简单判断,例如,当温度大于某个固定阈值时,便发起温度超标预警,而难以判断更为具体的风险,例如可燃气体的燃烧和湿度或腐蚀气体对电气设备的腐蚀,且难以实现对风险源头的定位;
4、公开号为cn110640763a的中国专利公开了一种综合管廊巡检机器人,包括机器人本体及其控制系统,所述机器人本体包括所述机器人本体底部设置的麦克纳姆轮驱动机构,后部设置的灭火执行机构,前部设置的升降监测机构,以及左右侧部设置的蛇形探测机构;然而该方法未能解决智能化的对综合管廊内的风险进行监测和定位的问题;
5、为此,本发明提出一种基于人工智能的综合管廊巡检机器人。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种基于人工智能的综合管廊巡检机器人,提高巡检效率和综合管廊的安全性。
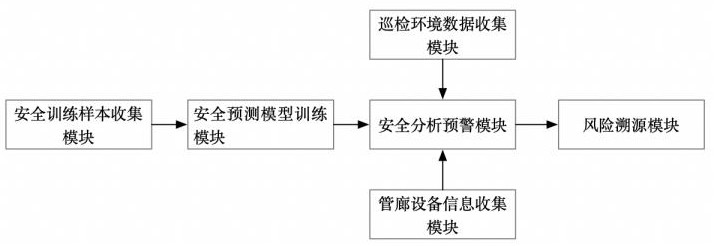
2、为实现上述目的,提出一种基于人工智能的综合管廊巡检机器人,包括管廊设备信息收集模块、安全训练样本收集模块、安全预测模型训练模块、巡检环境数据收集模块、安全分析预警模块以及风险溯源模块;其中,各个模块在巡检机器人的内置控制系统中通过电性方式连接;
3、管廊设备信息收集模块,用于预先收集城市综合管廊内各台设备的设备分布数据;
4、所述预先收集城市综合管廊内各台设备的设备分布数据的方式为:
5、收集城市综合管廊的空间布局的三维空间模型;
6、为三维空间模型构建三维空间坐标系;
7、收集城市综合管廊内各台电气设备的类型以及各台电气设备在三维空间模型内的三维空间坐标;
8、各台电气设备的类型和对应的三维空间坐标组成设备分布数据;
9、所述管廊设备信息收集模块将设备分布数据发送至安全分析预警模块;
10、安全训练样本收集模块,用于预先收集可燃概率训练样本数据和每种设备类型对应的寿命衰减训练样本数据;其中,所述可燃概率训练样本数据包括可燃概率输入数据和可燃概率标签数据;所述寿命衰减训练样本数据包括寿命衰减输入数据和寿命衰减标签数据;
11、所述预先收集可燃概率训练样本数据和寿命衰减训练样本数据的方式为:
12、预先通过在模拟通风廊道内进行n1次模拟燃烧实验,以收集n1组可燃概率样本特征向量和可燃概率样本标签;n1为预设的模拟燃烧实验的次数;
13、所述可燃概率样本特征向量包括模拟燃烧实验中设置的温度、湿度、各种可燃气体类型的浓度、氧气含量和通风风量;所述可燃概率样本标签为0或1中的一个;
14、所有可燃概率样本特征向量组成可燃概率输入数据,所有可燃概率样本标签组成可燃概率标签数据;
15、对于每种电气设备的类型,选择n2台实验电气设备,并设置n2次模拟腐蚀实验,收集n2组寿命衰减样本特征向量和寿命衰减样本标签;n2为预设的模拟腐蚀实验的次数;
16、所述寿命衰减样本特征向量包括模拟腐蚀实验设置的温度、湿度、各种腐蚀气体类型的浓度以及通风风量;所述寿命衰减样本标签为模拟腐蚀实验后收集的寿命衰减率;
17、对于每种设备类型,其对应的所有寿命衰减样本特征向量组成寿命衰减输入数据,对应的所有寿命衰减率组成寿命衰减标签数据;
18、所述安全训练样本收集模块将可燃概率训练样本数据和每种设备类型对应的寿命衰减训练样本数据发送至安全预测模型训练模块;
19、安全预测模型训练模块,用于以可燃概率输入数据为输入,以可燃概率标签数据为输出,训练预测通风廊道内出现可燃气体燃烧概率的燃烧概率预测模型,并以寿命衰减输入数据为输入数据,以寿命衰减标签数据为输出数据,训练预测各种电气设备的寿命衰减的寿命衰减预测模型;
20、所述训练预测通风廊道内出现可燃气体燃烧概率的燃烧概率预测模型的方式为:
21、将可燃概率输入数据中每组可燃概率样本特征向量作为燃烧概率预测模型的输入,所述燃烧概率预测模型以对该组可燃概率样本特征向量对应的燃烧概率的预测值作为输出,所述燃烧概率的预测值的取值范围为[0,1],以该组可燃概率样本特征向量对应的可燃概率样本标签作为预测目标,以燃烧概率的预测值和可燃概率样本标签之间的差值作为第一预测误差,以最小化第一预测误差之和作为训练目标;对燃烧概率预测模型进行训练,直至第一预测误差之和达到收敛时停止训练;
22、所述训练预测各种电气设备的寿命衰减的寿命衰减预测模型的方式为:
23、将寿命衰减输入数据中每组寿命衰减样本特征向量作为寿命衰减预测模型的输入,所述寿命衰减预测模型以对该组寿命衰减样本特征向量对应的寿命衰减率的预测值作为输出,所述寿命衰减率的预测值的取值范围为[0,1],以该组寿命衰减样本特征向量对应的寿命衰减样本标签作为预测目标,以寿命衰减率的预测值和寿命衰减样本标签之间的差值作为第二预测误差,以最小化第二预测误差之和作为训练目标;对寿命衰减预测模型进行训练,直至第二预测误差之和达到收敛时停止训练;
24、所述安全预测模型训练模块将燃烧概率预测模型和寿命衰减预测模型发送至安全分析预警模块;
25、巡检环境数据收集模块,用于在巡检机器人巡检过程中,实时收集管廊环境数据和机器人定位数据;
26、所述实时收集管廊环境数据和机器人定位数据包括:
27、预先收集巡检机器人在城市综合管廊内的巡检路线;
28、巡检机器人在按照巡检路线进行巡检时,实时通过定位装置获得巡检机器人的地理位置,再将地理位置转化为三维空间模型中的三维空间坐标,该三维空间坐标作为机器人定位数据;
29、通过预先在巡检机器人上安装的各台物理传感器实时收集管廊环境数据,所述管廊环境数据包括温度、湿度、通风风量、各种可燃气体类型的浓度、各种腐蚀气体类型的浓度和氧气含量;
30、所述巡检环境数据收集模块将实时收集的管廊环境数据和机器人定位数据发送至安全分析预警模块;
31、安全分析预警模块,基于管廊环境数据、燃烧概率预测模型,机器人定位数据、设备分布数据和寿命衰减预测模型,生成管廊安全预警和风险溯源指令;
32、所述生成管廊安全预警和风险溯源指令,包括:
33、基于管廊环境数据、燃烧概率预测模型,判断是否存在气体可燃风险,若存在气体可燃风险,发起气体燃烧预警;
34、基于管廊环境数据、机器人定位数据、寿命衰减预测模型和设备分布数据,判断是否存在设备寿命衰减风险,若存在设备寿命衰减风险,发起寿命衰减预警;所述管廊安全预警包括气体燃烧预警和管廊安全预警;
35、基于管廊环境数据、气体燃烧预警和寿命衰减预警,生成风险溯源指令;
36、所述判断是否存在气体可燃风险的方式为:
37、将管廊环境数据中的温度、湿度、通风风量、氧气含量以及各种可燃气体类型的浓度组成可燃概率特征向量,并将可燃概率特征向量输入燃烧概率预测模型中,获得输出的巡检机器人在当前位置的燃烧概率的预测值;若当前位置的燃烧概率的预测值大于预设的燃烧概率阈值,则判断为存在气体可燃风险;
38、所述判断是否存在设备寿命衰减风险的方式为:
39、根据设备分布数据,获得机器人定位数据所在位置处的电气设备的类型,读取该电气设备的类型对应的寿命衰减预测模型作为目标寿命衰减预测模型;
40、将管廊环境数据中的温度、湿度、通风风量以及各种腐蚀气体类型的浓度组成寿命衰减特征向量,并将寿命衰减特征向量输入目标寿命衰减预测模型,获得当前机器人定位数据所在位置的电气设备的寿命衰减率的预测值;若该电气设备的寿命衰减率的预测大于预设的寿命衰减率阈值,则判断为存在设备寿命衰减风险;
41、所述生成风险溯源指令,包括:
42、若管廊环境数据中的温度小于或等于预设的温度阈值:
43、若发起气体燃烧预警且发起寿命衰减预警,则生成可燃腐蚀气体溯源指令作为风险溯源指令;所述可燃腐蚀气体为可燃气体类型和腐蚀气体类型的交集;
44、若仅发起气体燃烧预警,则生成可燃气体溯源指令作为风险溯源指令;
45、若仅发起寿命衰减预警,则生成湿度溯源指令和腐蚀不可燃气体溯源指令作为风险溯源指令;所述腐蚀不可燃气体为具有腐蚀性而不可燃的气体;
46、若管廊环境数据中的温度大于预设的温度阈值:
47、若发起气体燃烧预警且发起寿命衰减预警,则生成温度溯源指令和可燃腐蚀气体溯源指令作为风险溯源指令;
48、若仅发起气体燃烧预警,则生成温度溯源指令和可燃气体溯源指令作为风险溯源指令;
49、若仅发起寿命衰减预警,则生成温度溯源指令和腐蚀不可燃气体溯源指令作为风险溯源指令;
50、所述安全分析预警模块将风险溯源指令发送至风险溯源模块;
51、风险溯源模块,基于风险溯源指令,对城市综合管廊内的安全风险进行溯源;
52、所述对城市综合管廊内的安全风险进行溯源的方式为:
53、若风险溯源指令中包含温度溯源指令或湿度溯源指令,则巡检机器人实时检测各个前进方向的温度或湿度,并沿着温度或湿度上升的路线进行移动,且在移动过程中启动携带的图像捕获设备,所述图像捕获设备实时收集环境图像,数据处理后台实时分析环境图像中是否存在燃烧标志或漏水标志,将存在燃烧标志或漏水标志的位置标记为温度风险源点或湿度风险源点;
54、若风险溯源指令中仅包含指定气体溯源指令,则巡检机器人实时检测各个前进方向的该指定气体的浓度,并沿着浓度上升的路线进行移动,且在移动过程中实时记录该指定气体的浓度,并将浓度最大值的位置标记为浓度风险源点;所述指定气体包括可燃气体、可燃腐蚀气体、腐蚀不可燃气体;
55、若风险溯源指令中包含指定气体溯源指令和其他溯源指令,则按照其他溯源指令的溯源方式进行溯源,并实时记录各个位置的指定气体浓度,将溯源过程中,指定气体浓度最大的位置标记为浓度风险源点;所述其他溯源指令包括温度溯源指令或湿度溯源指令。
56、提出一种基于人工智能的综合管廊巡检机器人巡检方法,包括以下步骤:
57、步骤一:预先收集城市综合管廊内各台设备的设备分布数据;
58、步骤二:预先收集可燃概率训练样本数据和每种设备类型对应的寿命衰减训练样本数据;其中,所述可燃概率训练样本数据包括可燃概率输入数据和可燃概率标签数据;所述寿命衰减训练样本数据包括寿命衰减输入数据和寿命衰减标签数据;
59、步骤三:以可燃概率输入数据为输入,以可燃概率标签数据为输出,训练预测通风廊道内出现可燃气体燃烧概率的燃烧概率预测模型,并以寿命衰减输入数据为输入数据,以寿命衰减标签数据为输出数据,训练预测各种电气设备的寿命衰减的寿命衰减预测模型;
60、步骤四:在巡检机器人巡检过程中,实时收集管廊环境数据和机器人定位数据;
61、步骤五:基于管廊环境数据、燃烧概率预测模型,判断是否存在气体可燃风险,若存在气体可燃风险,发起气体燃烧预警;
62、基于管廊环境数据、机器人定位数据、寿命衰减预测模型和设备分布数据,判断是否存在设备寿命衰减风险,若存在设备寿命衰减风险,发起寿命衰减预警;所述管廊安全预警包括气体燃烧预警和管廊安全预警;
63、基于管廊环境数据、气体燃烧预警和寿命衰减预警,生成风险溯源指令;
64、步骤六:基于风险溯源指令,对城市综合管廊内的安全风险进行溯源。
65、一种电子设备,包括:处理器和存储器,其中,所述存储器中存储有可供处理器调用的计算机程序;
66、所述处理器通过调用所述存储器中存储的计算机程序,执行上述的基于人工智能的综合管廊巡检机器人巡检方法。
67、一种计算机可读存储介质,其上存储有可擦写的计算机程序;
68、当所述计算机程序在计算机设备上运行时,使得所述计算机设备执行上述的基于人工智能的综合管廊巡检机器人巡检方法。
69、与现有技术相比,本发明的有益效果是:
70、本发明通过在巡检机器人的内置控制系统中设置管廊设备信息收集模块、安全训练样本收集模块、安全预测模型训练模块、巡检环境数据收集模块、安全分析预警模块以及风险溯源模块,管廊设备信息收集模块预先收集城市综合管廊内各台设备的设备分布数据,安全训练样本收集模块预先收集可燃概率训练样本数据和每种设备类型对应的寿命衰减训练样本数据,安全预测模型训练模块主要用于以可燃概率输入数据为输入,以可燃概率标签数据为输出,训练预测通风廊道内出现可燃气体燃烧概率的燃烧概率预测模型,并以寿命衰减输入数据为输入数据,以寿命衰减标签数据为输出数据,训练预测各种电气设备的寿命衰减的寿命衰减预测模型,巡检环境数据收集模块在巡检机器人巡检过程中,实时收集管廊环境数据和机器人定位数据,安全分析预警模块基于管廊环境数据、燃烧概率预测模型,判断是否存在气体可燃风险,若存在气体可燃风险,发起气体燃烧预警,基于管廊环境数据、机器人定位数据、寿命衰减预测模型和设备分布数据,判断是否存在设备寿命衰减风险,若存在设备寿命衰减风险,发起寿命衰减预警;所述管廊安全预警包括气体燃烧预警和管廊安全预警,基于管廊环境数据、气体燃烧预警和寿命衰减预警,生成风险溯源指令,基于风险溯源指令,对城市综合管廊内的安全风险进行溯源;通过巡检机器人在综合管廊内巡检时实时收集环境数据,通过对环境数据进行智能分析,计算出综合管廊内的可燃气体的燃烧概率和对电气设备的寿命衰减影响,再综合燃烧预警和寿命衰减预警,判断可能需要的溯源因素,从而在智能判断风险的基础上,实现风险定位,提高巡检效率和综合管廊的安全性。
- 还没有人留言评论。精彩留言会获得点赞!