具有抓取功能的潜水设备的制作方法
本申请涉及潜水设备,特别是涉及一种具有抓取功能的潜水设备。
背景技术:
1、随着海洋开发的热度上升,越来越多的海洋作业需要潜水设备,比如海底遗迹的打捞、科考项目中的海底珊瑚取样甚至是海底观光项目的贝壳拾取等。这些海底活动都需要具有抓取功能的潜水设备。
2、目前,具有抓取功能的潜水设备抓取目标物识别大多采用摄像头或者目视。然而,采用摄像头的识别结构会出现信号延迟的现象,这是由于数据传输过程中,存在信号延时,而采用低延时的信号传输设备高昂。而采用目视的方法,存在光线的折射,这会导致目标物定位不准确。具体的,虽然潜水设备的抓取机构与目标物同处于海水,但是移动抓取机构过程中,仍会因为光线折射导致定位不准确,这会延长海底作业时间,消耗大量氧气。为此有必要针对传统的目视法抓取目标物的潜水设备无法快速精确抓取目标物的缺陷,提出一种具有抓取功能的潜水设备。
技术实现思路
1、基于此,有必要针对传统的目视法抓取目标物的潜水设备无法快速精确抓取目标物的缺陷,提出一种具有抓取功能的潜水设备。
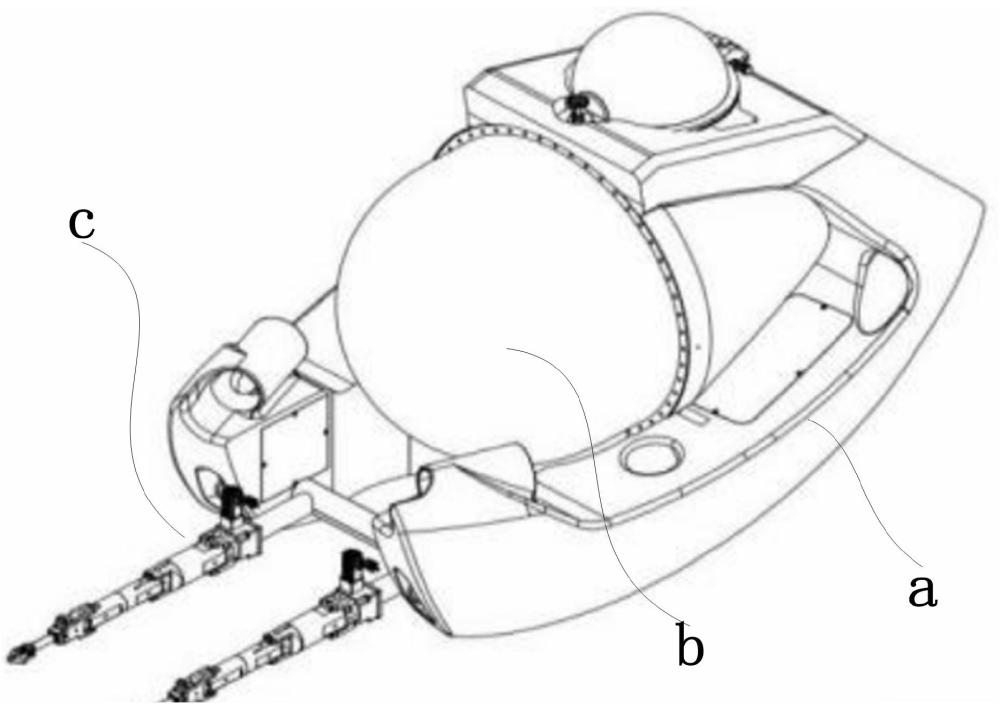
2、本申请提供一种具有抓取功能的潜水设备,应用于潜水艇,所述潜水艇包括:
3、水舱;
4、观察舱,与所述水舱固定连接;
5、机械臂,与所述水舱固定连接;
6、所述机械臂,包括:
7、耦合器,与所述水舱固定连接,与所述观察舱电连接,所述耦合器包括第一耦合部、第二耦合部和第三耦合部,所述第一耦合部与所述第二耦合部相互垂直,所述第一耦合部与所述第三耦合部相互垂直,所述第二耦合部和所述第三耦合部相互垂直;
8、第一支臂,与所述耦合器连接,所述第一支臂包括第一本体和第一电机,所述第一本体与所述第一电机铰接;
9、第二支臂,包括第二本体和第二电机,所述第二本体与所述第二电机铰接,所述第一电机的中心轴和所述第二电机的中心轴相互垂直;
10、抓取手,与所述第二支臂铰接。
11、本申请涉及一种具有抓取功能的潜水设备,通过水舱承载观察舱,观察舱为操作员提供了容身处。由于观察舱内部的介质为空气,而观察舱外部的介质为海水,由于这两种介质的折射率不一样,目标物在操作员眼中的成像会偏离目标物的实际位置。此时有两种解决方案:其一,利用同在海水中的机械臂缓慢靠近目标物,慢慢修正偏差,由于机械臂在操作员的眼中的成像也有偏差,机械臂慢慢靠近目标物时,也能够触摸到目标物,然而,这种方法较为耗时,潜水设备所携带的氧气,难以支持长时间的抓取任务。其二,操作手直接移动第一支臂和第二支臂至操作手眼中目标物成像位置,由观察舱内的电子主板,计算第一电机和第二电机的转动量,计算出第一支臂和第二支臂的位移量,在通过海水在空气中的折射偏差量,利用耦合器的第一耦合部、第二耦合部和第三耦合部,在三维空间内,对抓取手的偏差量进行耦合修正。这种装置设计,只修要根据目标物的成像就能够快速定位抓取手于目标物。
技术特征:
1.一种具有抓取功能的潜水设备,应用于潜水艇,所述潜水艇包括:
2.根据权利要求1所述的一种具有抓取功能的潜水设备,其特征在于,所述耦合器还包括第一基板和第二基板;
3.根据权利要求2所述的一种具有抓取功能的潜水设备,其特征在于,所述第一耦合部包括第一滑轨和第一直线电机;
4.根据权利要求3所述的一种具有抓取功能的潜水设备,其特征在于,所述第二耦合部包括第二滑轨和第二直线电机;
5.根据权利要求4所述的一种具有抓取功能的潜水设备,其特征在于,所述第三耦合部包括第三滑轨和第三直线电机;
6.根据权利要求5所述的一种具有抓取功能的潜水设备,其特征在于,所述第一电机与所述第一基板固定连接;
7.根据权利要求6所述的一种具有抓取功能的潜水设备,其特征在于,所述第二电机与所述第一本体的第二端固定连接;
8.根据权利要求5所述的一种具有抓取功能的潜水设备,其特征在于,所述第一电机与所述第一基板固定连接;
9.根据权利要求8所述的一种具有抓取功能的潜水设备,其特征在于,所述第二电机与所述第一本体的第二端固定连接;
10.根据权利要求9所述的一种具有抓取功能的潜水设备,其特征在于,所述水舱与所述第一基板贴合处设置有凸块;
技术总结
本申请涉及一种具有抓取功能的潜水设备,通过水舱承载观察舱,观察舱为操作员提供了容身处。由于观察舱内部的介质为空气,而观察舱外部的介质为海水,由于这两种介质的折射率不一样,目标物在操作员眼中的成像会偏离目标物的实际位置。操作手直接移动第一支臂和第二支臂至操作手眼中目标物成像位置,由观察舱内的电子主板,计算第一电机和第二电机的转动量,计算出第一支臂和第二支臂的位移量,在通过海水在空气中的折射偏差量,利用耦合器的第一耦合部、第二耦合部和第三耦合部,在三维空间内,对抓取手的偏差量进行耦合修正。这种装置设计,只修要根据目标物的成像就能够快速定位抓取手于目标物。
技术研发人员:姜支弟
受保护的技术使用者:海南坤联科技有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!