一种线缆驱动式软体机械臂
本发明涉及一种线缆驱动式软体机械臂,属于柔性体驱动。
背景技术:
1、常见的柔性体为软体机械臂,其在与人/环境交互过程中的柔顺性、适应性和安全性等优势,在军事侦察、医疗手术、工程应用等领域具有广泛的应用前景。柔性机械臂的控制精度与其驱动装置密切相关。驱动装置需要能够准确地控制柔性机械臂的形变和运动,同时保持足够的柔性和精度。控制精度受到驱动装置的稳定性、响应速度以及力和位置控制能力的影响。柔性机械臂的控制精度通常需要在保持柔软性的同时,实现对形态的准确调节。
2、目前柔性机械臂的驱动方式包括气动驱动、液压驱动、电动驱动和线驱动等。气动驱动具有简单、灵活的特点,但控制精度较低且响应速度相对较慢;液压驱动具有较大的力矩输出和精度,但系统复杂、能耗高;电动驱动精度高、响应速度快,但柔性较差且容易受到外部干扰;线驱动通过绳索或缆索来驱动软体,具有较好的柔性和精度,但需要考虑绳索的张力和松弛问题。
3、公开号为cn105150219a的专利公开了一种基于绳索驱动的超冗余柔性机械臂,包括驱动模块、机械臂模块与若干驱动绳,机械臂模块包括多个串联的关节,相邻的关节通过设于二者之间相互交叉且垂直的转轴连接,任意关节上固接有至少三处的驱动绳,驱动绳可在驱动模块的驱动下独立运动,且位于同一关节上的驱动绳满足设置:该关节可随驱动绳的拉动而相对临近的关节发生绕所述转轴的转动。机械臂模块为刚性结构,通过转轴连接相邻关节,通过拉动驱动绳带动关节转动,但是机械臂模块本身无法根据环境路线产生对应形变,并且由于相邻机械臂模块之间仅依靠转轴连接,无法实现整体的柔性形变,存在应用局限性;并且驱动绳所在管路均为直线管路,拉动驱动绳时,机械臂模块的末端连接处随之产生形变,但是远离末端的节段处形变量较小,存在控制滞后性,无法精准控制机械臂模块的形变和运动,并且若遇到拥有多个拐弯口的复杂情况,该机械臂模块无法实现整体多角度的形变。
技术实现思路
1、发明目的:针对现有技术中存在的不足,本发明提供了一种线缆驱动式软体机械臂,本发明通过设置软体弹性材质的软体机械臂,并同时设置至少三组控制单元对其进行控制,实现了软体机械臂整体形变控制。
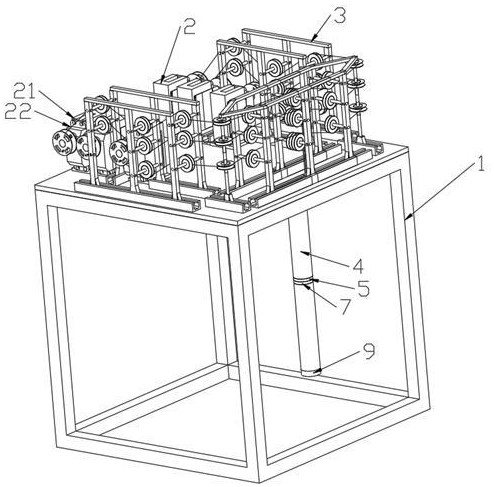
2、技术方案:一种线缆驱动式软体机械臂,包括安装台、控制装置、安装组件、软体机械臂,所述控制装置通过安装组件设置于安装台上,软体机械臂通过安装台与控制装置连接;
3、所述控制装置包括至少三组控制单元,所述控制单元包括互相连接的驱动组件和控制绳,所述软体机械臂沿轴向贯穿设有通道,每组所述控制绳分别穿过通道与软体机械臂的末端可拆卸式连接,所述软体机械臂为软体弹性材料。
4、本发明通过将软体机械臂设置为柔性材料,同时设置至少三组驱动组件和控制绳,控制绳通过通道控制软体机械臂的弯曲形变,驱动组件驱动控制绳的伸缩,可以控制整体软体机械臂进行弯曲形变。
5、优选项,为了精准控制软体机械臂整体形变,所述通道为旋向相同的螺旋通道,且通道口沿圆周方向均布设置。将通道设置为旋向相同的螺旋通道,当控制绳拉紧后,软体机械臂整体会同时发生压缩形变,避免直筒状管道所造成的首端控制的滞后性;可通过控制每根控制绳的张紧度,以适应多个拐弯口时的复杂情况,实现整体多角度形变。
6、为了实现对下节段的控制,优选项,至少设置两组依次连接的软体机械臂,每组所述软体机械臂上同轴设有第一通孔,相邻所述软体机械臂之间还安装有第一连接件,所述第一连接件上设有与第一通孔同轴的第二通孔,所述第一连接件与相邻所述软体机械臂中的下节段的上端面拼合构成分线槽,所述分线槽的一端与第二通孔连通,另一端与下节段的螺旋通道口连通,所述控制绳自第一通孔依次经过第二通孔、分线槽后,进入下节段的螺旋通道内。
7、通过设置分线槽,使下节段的控制绳依次经过第一通孔、第二通孔、分线槽后进入下节段的螺旋通道内,设置第二通孔是为了让下节段的控制绳穿过上节段到达下节段,设置分线槽是为了让下节段的控制绳进入下节段螺旋通道内部,从而以实现对下节段的控制。
8、优选项,为了便于上节段控制绳的安装,所述第一连接件上还设有与上节段的螺旋通道口分别同轴的第三通孔。由于软体机械臂为软体弹性材料,在拉紧控制绳时,末端螺旋通道口处的应力过于集中,整个端面仅通过螺旋通道口受力,应力过于集中,此处会随着拉力越大而产生越严重的形变,甚至磨损螺旋通道口,因此设置刚性材料的第一连接件通过第三通孔来连接控制绳,此时拉紧控制绳后,由末端整个端面受力,既保护软体机械臂,同时保证控制效果。
9、优选项,为了保证控制绳的可靠性,还包括第二连接件,所述第二连接件设有与第二通孔同轴的第四通孔和与下节段的螺旋通道口分别同轴的第五通孔,所述第一连接件与第二连接件拼合构成分线槽,所述分线槽的一端与第二通孔连通,另一端与第五通孔连通,所述控制绳自第一通孔依次经过第二通孔、第一连接件与第二连接件拼合构成的分线槽、第五通孔后,进入下节段的螺旋通道内。
10、通过刚性第一连接件和刚性第二连接件拼合构成的分线槽,来防止软体机械臂端面弯曲形变,进而导致其端面与第一连接件之间存在缝隙,使得控制绳从分线槽中脱出,提高控制绳的可靠性。
11、优选项,为了便于第一连接件和第二连接件的安装,所述第一连接件和第二连接件沿轴向分别设有第一凸台和第二凸台,所述第一凸台设有与第二通孔连通的第六通孔,所述第二凸台设有与第四通孔连通的第七通孔,所述第一凸台的外壁与上节段软体机械臂的第一通孔的内壁接触,所述第二凸台的外壁与下节段软体机械臂的第一通孔的内壁接触。
12、设置凸台既可以在安装第一连接件和第二连接件时提供导向作用,同时降低软体机械臂与二者之间的装配难度。
13、优选项,为了提高软体机械臂的控制效果,所述第一凸台和第二凸台的第六通孔和第七通孔内分别设置分线部,下节段的控制绳经过上节段的第一通孔时,同时穿过第一凸台和第二凸台的分线部。通过设置分线部,防止第一通孔内的控制绳互相缠绕,导致拉紧时互相摩擦,容易打结无法移动,进而影响软体机械臂的控制效果的问题。
14、优选项,为了便于整体软体机械臂末端与控制绳的连接,整体所述软体机械臂的末端设置有末端连接件,所述末端连接件上设有末端连接孔和末端连接凸台,所述末端连接孔与螺旋通道口同轴设置,所述末端连接凸台的外壁与第一通孔内壁接触。
15、设置末段连接件通过末段连接孔与控制绳连接,减少软体机械臂的磨损,保护软体机械臂,同时保证末端的控制效果,末端连接凸台便于控制绳与软体机械臂的安装。
16、优选项,为了提高控制绳传动的稳定性,所述驱动组件包括驱动电机、主动轮和从动轮,所述驱动电机与主动轮连接,所述控制绳分别与主动轮和从动轮缠绕连接,所述从动轮与安装组件连接,每组所述从动轮沿着垂直于主动轮中心轴线的方向同轴设置。
17、若每组从动轮不处于同一轴线上,控制绳容易自从动轮上松脱,并且会在从动轮的侧轮面上摩擦,对控制绳造成磨损,降低控制绳的使用寿命和传动稳定性。
18、优选项,为了提高安装台的空间利用率,还包括设置在安装组件上的转向轮,所述转向轮的中心轴线与从动轮的中心轴线垂直。设置转向轮,便于将驱动组件紧凑安装,避免直线排开的驱动组件占用安装台过多空间,提高空间利用率,同时将转向轮和从动轮垂直设置,便于控制绳在转角处转向时不容易脱落,提高整体传动的稳定性。
19、有益效果:本发明控制绳通过螺旋通道,螺旋拉紧或松开软体机械臂,可以控制软体机械臂的整段形变,使得软体机械臂的每个部分都可以根据环境路线随变,且整体段的形变同时开始,避免首端形变的滞后性,进而可以适应复杂环境的同时,提高控制精度;并且通过设置第一连接件和第二连接件,便于控制绳与软体机械臂的安装,以及相邻软体机械臂之间的安装;设置分线部避免控制绳缠绕降低控制精度,损坏控制绳。
- 还没有人留言评论。精彩留言会获得点赞!