一种编程教育机器人的制作方法
[0001]
本发明涉及编程技术领域,尤其涉及一种编程教育机器人。
背景技术:
[0002]
随着科技的进步,机器人技术在人类生活和工业生产制造中发挥着越来越重要的作用,教育机器人作为机器人中的一种特殊机器人,其除用于参加各种比赛外,还可用于学科教学与课外兴趣拓展,提高学生设计、编程开发、应用机器人的能力和创新能力。
[0003]
经检索,中国专利号cn 109648581 a公开了一种可编程的教育机器人,包括机器人本体,所述机器人本体内置有测控装置,所述机器人本体的中间身体部位设置有容器,手臂设置有原料罐,所述原料罐通过原料管与所述容器上方的进料管连接,腿部设有运动轮;容器上端设置的进料管为t型空腔,容器左侧壁设有第一出料管,其竖直管段开有一个缺口,在缺口处固定连接有l型空腔,l型空腔竖直段下端口与第一出料管竖直管段上开设的缺口相贯通,l型空腔水平段的端口向右延伸进入所述进料管竖直管段内,在l型空腔的竖直段和水平段分别设置有竖直滑块和水平滑块。
[0004]
现有技术中类似的编程教育机器人,在实际使用时存在如下的缺点机器人内部电子器件众多,在使用时难免会产生大量的热量,有机器人本身的壳体较为密封,因此不能使内部热量快速的挥发出去,造成内部温度升高,增加机器人的损毁率,同时机器人头部一般具有摄像头,或者头部安装了显示屏,因此空气中的灰尘容易覆盖在显示屏或者摄像头上,造成显示屏内容显示不清楚,或者摄像头画面获取不清楚,因此有必要对其进行改进。
技术实现要素:
[0005]
本发明的目的是为了解决现有技术中存在的缺陷,而提出的一种编程教育机器人。
[0006]
为了实现上述目的,本发明采用了如下技术方案:
[0007]
一种编程教育机器人,包括机器人上半身、头部、手掌,所述机器人上半身正面的上方安装有按钮,所述头部的正面安装有显示屏,所述机器人上半身的顶壁上安装有伺服电机和两个支撑板,两个所述支撑板通过安装有螺纹杆和滑杆,所述螺纹杆与两个支撑板转动安装,所述滑杆与两个支撑板固定安装,所述螺纹杆和滑杆共同安装有可移动海绵刮条,所述可移动海绵刮条与螺纹杆螺纹连接,所述可移动海绵刮条与滑杆滑动连接,所述可移动海绵刮条的顶端向上延伸,并与显示屏的表面摩擦接触,所述螺纹杆的一端与伺服电机的驱动端固定;
[0008]
所述机器人上半身的两侧和下侧开设有l形腔,所述l形腔包括相互连通的竖向腔和横向腔,所述机器人上半身位于竖向腔的上侧还开设有安装孔,所述安装孔内安装有散热电机,所述机器人上半身位于竖向腔的内侧壁上安装有竖向吸热片,且竖向吸热片上安装有多个第一倾斜吸热导流片,所述机器人上半身靠近竖向腔处的外侧壁上开设有多个进气孔和出气孔,且进气孔和出气孔均与竖向腔内部连通,所述出气孔与第一倾斜吸热导流
片相互衔接,所述竖向腔内转动安装有立杆,且立杆的顶端与散热电机的驱动端固定,所述立杆贯穿每个第一倾斜吸热导流片,所述立杆上靠近每个第一倾斜吸热导流片的上侧均安装有第一风扇;
[0009]
所述机器人上半身位于横向腔的顶壁上安装有横向吸热片,所述横向吸热片的底壁安装有多个第二倾斜吸热导流片,所述横向腔远离竖向腔的一端与排气口连通,且排气口开设在机器人上半身的底壁上,所述横向腔内转动安装有横杆,且横杆上靠近第二倾斜吸热导流片的位置处安装有多个第二风扇,所述横杆与立杆相互靠近的一端通过伞齿轮啮合传动。
[0010]
进一步地,所述第一倾斜吸热导流片贯穿开设有通孔,且通孔的直径大于立杆的直径。
[0011]
进一步地,所述第二倾斜吸热导流片位于横杆的上侧,且与横杆不接触。
[0012]
进一步地,所述立杆的底端转动安装在竖向腔和横向腔交汇处的底壁上。
[0013]
进一步地,所述横杆靠近立杆的一端还转动安装支撑片,且支撑片固定在竖向腔和横向腔交汇处的底壁上。
[0014]
进一步地,位于机器人上半身内部两侧的两个所述l形腔互不连通。
[0015]
进一步地,所述安装孔和排气口处均安装有防护网。
[0016]
进一步地,所述竖向吸热片、第一倾斜吸热导流片、横向吸热片和第二倾斜吸热导流片均为铜片。
[0017]
相比于现有技术,本发明的有益效果在于:
[0018]
1、本方案在机器人上半身的内部两侧和下侧开设竖向腔和横向腔,并在墙体内设置用于吸热和导流的铜制金属片,然后配合各个的风扇的运转,可将机器人内部的热量及时且快速的排出,降低其内部工作温度,保证内部电气器件可安全稳定的运行使用。
[0019]
2、在机器人头部的显示屏外侧设置可以来回移动的海绵刮条,从而可利用海绵刮条擦除显示屏上的灰尘和指纹,保证显示屏正常显示,同时若机器人头部内安装摄像头时,也可保证摄像头获取清晰的画面。
[0020]
3、机器人的散热和显示屏清洁工作可通过对机器人进行编程,从而可培养学生的编程技术能力。
[0021]
综上所述,本方案的编程教育机器人可提升和培养学生的编程技术能力,同时可以实现机器人自身的散热和显示屏清洁,确保机器人可发挥作用。
附图说明
[0022]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
[0023]
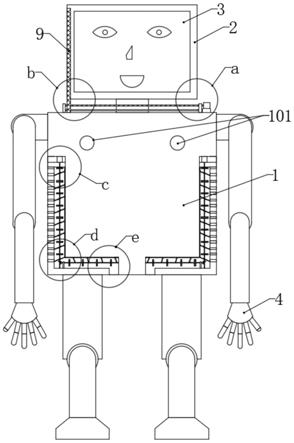
图1为本发明提出的一种编程教育机器人的整体结构示意图;
[0024]
图2为本发明提出的一种编程教育机器人在按压其中一个按钮时的操作示意图;
[0025]
图3为本发明提出的一种编程教育机器人在按压另一个按钮时的操作示意图;
[0026]
图4为图1中a部分结构放大图;
[0027]
图5为图1中b部分结构放大图;
[0028]
图6为图1中c部分结构放大图;
[0029]
图7为图1中d部分结构放大图;
[0030]
图8为图1中e部分结构放大图。
[0031]
图中:1机器人上半身、101按钮、2头部、3显示屏、4手掌、5伺服电机、6支撑板、7螺纹杆、8滑杆、9可移动海绵刮条、10安装孔、11散热电机、12竖向腔、13进气孔、14出气孔、15竖向吸热片、16第一倾斜吸热导流片、17立杆、18第一风扇、19伞齿轮、20横杆、21第二风扇、22横向吸热片、23第二倾斜吸热导流片、24横向腔、25排气口。
具体实施方式
[0032]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0033]
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0034]
参照图1-8,一种编程教育机器人,包括机器人上半身1、头部2、手掌4,机器人上半身1正面的上方安装有按钮101,头部2的正面安装有显示屏3,机器人上半身1的顶壁上安装有伺服电机5和两个支撑板6,两个支撑板6通过安装有螺纹杆7和滑杆8,螺纹杆7与两个支撑板6转动安装,滑杆8与两个支撑板6固定安装,螺纹杆7和滑杆8共同安装有可移动海绵刮条9,可移动海绵刮条9与螺纹杆7螺纹连接,可移动海绵刮条9与滑杆8滑动连接,可移动海绵刮条9的顶端向上延伸,并与显示屏3的表面摩擦接触,螺纹杆7的一端与伺服电机5的驱动端固定,其中一个按钮101可用于控制伺服电机5的开关,另一个按钮101可用于控制散热电机11的开关。
[0035]
伺服电机5外接单片机,用于控制正转和反转,伺服电机5驱动螺纹杆7转动,此时可促使可移动海绵刮条9沿着螺纹杆7和滑杆8移动,并可将显示屏3表面的灰尘或者指纹进行清除,确保显示屏3正常清楚的显示。若机器人的头部2内还安装有摄像头时,也可保证其可以获取清晰的图像。
[0036]
按钮101的按压操作,可作用学生练习编程技术的操作目标,通过编程技术,来控制机器人的手臂和手掌4来实现,机器人上半身1的内部用于安装各类电子元器件,为机器人的编程提供基础。
[0037]
机器人上半身1的两侧和下侧开设有l形腔,本实施例中,位于机器人上半身1内部两侧的两个l形腔互不连通。l形腔包括相互连通的竖向腔12和横向腔24,机器人上半身1位于竖向腔12的上侧还开设有安装孔10,安装孔10内安装有散热电机11,机器人上半身1位于竖向腔12的内侧壁上安装有竖向吸热片15,且竖向吸热片15上安装有多个第一倾斜吸热导流片16,竖向吸热片15将机器人内部的热量吸收,并传递至第一倾斜吸热导流片16,此时竖向腔12内也会存在一定的的热量。
[0038]
机器人上半身1靠近竖向腔12处的外侧壁上开设有多个进气孔13和出气孔14,且进气孔13和出气孔14均与竖向腔12内部连通,出气孔14与第一倾斜吸热导流片16相互衔接,竖向腔12内转动安装有立杆17,且立杆17的顶端与散热电机11的驱动端固定,立杆17贯穿每个第一倾斜吸热导流片16,立杆17上靠近每个第一倾斜吸热导流片16的上侧均安装有
第一风扇18。
[0039]
散热电机11直接驱动立杆17转动,此时每个第一风扇18均开始转动,第一风扇18将竖向腔12内的热量通过出气孔14排出,并将外部的冷空气从进气孔13吸附,实现空气循环,外部冷空气可对竖向吸热片15和第一倾斜吸热导流片16进行冷却散热。
[0040]
机器人上半身1位于横向腔24的顶壁上安装有横向吸热片22,横向吸热片22的底壁安装有多个第二倾斜吸热导流片23,横向腔24远离竖向腔12的一端与排气口25连通,且排气口25开设在机器人上半身1的底壁上,横向腔24内转动安装有横杆20,且横杆20上靠近第二倾斜吸热导流片23的位置处安装有多个第二风扇21,横杆20与立杆17相互靠近的一端通过伞齿轮19啮合传动。本实施例中,第二倾斜吸热导流片23位于横杆20的上侧,且与横杆20不接触。
[0041]
立杆17转动时,可通过伞齿轮19的啮合从而带动横杆20转动,此时第二风扇21转动,机器人内部的热量被横向吸热片22吸收并传递给第二倾斜吸热导流片23,同时横向腔24内也会存在一定的热量,利用转动的第二风扇21将横向腔24内的热量从排气口25排出,同时对横向吸热片22和第二倾斜吸热导流片23进行冷却散热。
[0042]
第一倾斜吸热导流片16贯穿开设有通孔,且通孔的直径大于立杆17的直径。
[0043]
本实施例中,立杆17的底端转动安装在竖向腔12和横向腔24交汇处的底壁上。
[0044]
本实施例中,横杆20靠近立杆17的一端还转动安装支撑片,且支撑片固定在竖向腔12和横向腔24交汇处的底壁上。
[0045]
本实施例中,安装孔10和排气口25处均安装有防护网。防护网可用于一定程度的防尘,同时避免可能存在的人员伤害。
[0046]
进一步地,竖向吸热片15、第一倾斜吸热导流片16、横向吸热片22和第二倾斜吸热导流片23均为铜片。
[0047]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1