一种用于飞行员平衡能力训练的固滚训练装置
1.本实用新型涉及一种飞行训练器材技术领域,具体涉及一种用于飞行员平衡能力训练的固滚训练装置。
背景技术:
2.固定滚轮训练是一种在固定的轮子里,通过人体重心移动变化使轮子转动,从而使身体得到锻炼的运动项目。通过此类运动能有效的训练运动者的前庭平衡功能,准确的来说是其空间定向能力,即对自己在空间的姿态、位置和运动的判断及认识能力。在飞行、飞行员学员的日常训练任务中,固滚是必备的训练器材。
3.为了提高在固滚训练中的安全性,有人在固滚上设置了刹车系统,以达到在出现意外事故的情况下进行制动停止训练的目的。但是这种刹车系统是通过事后的人工控制方式进行制动,对于训练时出现的紧急事故并不能及时地有效制动,需要一定的反应时间,制动效果并不理想,仍然存在安全隐患。
技术实现要素:
4.本实用新型所要解决的技术问题是现有的飞行员用的固滚训练装置上的刹车系统是通过事后的人工控制方式进行制动,无法及时有效制动,存在安全隐患。目的在于提供一种用于飞行员平衡能力训练的固滚训练装置,以解决以上问题。
5.本实用新型通过下述技术方案实现:
6.一种用于飞行员平衡能力训练的固滚训练装置,包括固滚,还包括:
7.图像获取模块,设于所述固滚上,用于获取飞行员训练过程中的行为状态图像、周边状态图像;
8.制动模块,设于所述固滚上,用于对所述旋转部进行制动或解除制动使所述旋转部停止转动或开启转动;
9.控制器,接收所述行为状态图像信息、周边状态图像信息,并控制所述制动模块的开启或关闭。
10.可选地,还包括第一转轴,所述制动模块包括第二转轴、电机,所述电机的动力输出端固定连接所述第二转轴,所述第一转轴、第二转轴转动连接所述固滚的支撑架,第一转轴、第二转轴远离所述电机的一端固定连接所述固滚的旋转部,电机连接所述控制器。
11.可选地,所述电机、图像获取模块安装在固滚支撑架的支撑板上,所述图像获取模块安装在所述支撑板上;
12.所述图像获取模块包括第一摄像头、第二摄像头,所述第一摄像头、第二摄像头设于所述支撑板的两侧,并与所述控制器连接。
13.可选地,还包括显示模块,连接所述控制器,所述控制器、第二摄像头均内置于所述显示模块内。
14.可选地,所述显示模块为人机交互式触摸屏,用于输入训练量控制指令。
15.可选地,还包括压力监测器,所述压力监测器设于所述固滚旋转部上,所述压力监测器连接所述控制器。
16.可选地,所述压力监测器为薄膜式压力传感器,多个压力传感器等间距间隔分布在所述固滚的抓握部和脚部支撑架。
17.可选地,所述抓握部包括第一部和第二部,所述第一部上间隔设置的压力传感器沿第一部周面的分布区域长度为10cm,所述第二部上间隔设置的压力传感器沿第二部周面的分布区域长度为20cm。
18.可选地,还包括心率监测器,所述心率监测器通过无线传输方式连接所述控制器。
19.可选地,还包括数据存储端,连接所述控制器。
20.本实用新型与现有技术相比,具有如下的优点和有益效果:
21.本实用新型实施例提供的一种用于飞行员平衡能力训练的固滚训练装置,通过设置图像获取模块、控制器、制动模块,可以实时监测训练过程中飞行员的行为状态及周边环境,当出现异常或意外事故时可以第一时间自动进行制动,立即停止训练,可以确保飞行员的人身安全,降低安全隐患,用时短,制动反馈迅速,不需要进行人工制动,同时当异常或危险解除可以自动解除制动,使训练继续进行。既能确保训练过程的安全,又可以节省人力。
附图说明
22.为了更清楚地说明本实用新型示例性实施方式的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。在附图中:
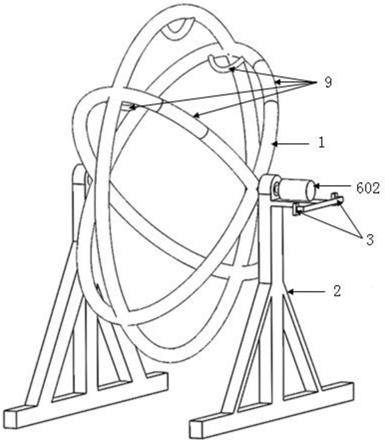
23.图1为本实用新型实施例提供的一种用于飞行员平衡能力训练的固滚训练装置的结构示意图。
24.图2为本实用新型实施例提供的一种用于飞行员平衡能力训练的固滚训练装置的各压力监测器、转轴的分布示意图。
25.图3为本实用新型实施例提供的一种用于飞行员平衡能力训练的固滚训练装置的支撑板及摄像头的结构示意图。
26.图4为本实用新型实施例提供的一种用于飞行员平衡能力训练的固滚训练装置的工作原理图。
27.附图中各部件及标记为:
28.1-旋转部,101-第一部,102-第二部,2-支撑架,3-图像获取模块,301-第一摄像头,302-第二摄像头,4-控制器,5-第一转轴,601-第二转轴,602-电机,7-支撑板,8-显示模块,9-压力监测器,10-心率监测器,11-数据存储端。
具体实施方式
29.为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本实用新型,并不作为对本实用新型的限定。
30.在整个说明书中,对“一个实施例”、“实施例”、“一个示例”或“示例”的提及意味
着:结合该实施例或示例描述的特定特征、结构或特性被包含在本实用新型至少一个实施例中。因此,在整个说明书的各个地方出现的短语“一个实施例”、“实施例”、“一个示例”或“示例”不一定都指同一实施例或示例。此外,可以以任何适当的组合和、或子组合将特定的特征、结构或特性组合在一个或多个实施例或示例中。此外,本领域普通技术人员应当理解,在此提供的示图都是为了说明的目的,并且示图不一定是按比例绘制的。这里使用的术语“和/或”包括一个或多个相关列出的项目的任何和所有组合。
31.在本实用新型的描述中,术语“前”、“后”、“左”、“右”、“上”、“下”、“竖直”、“水平”、“高”、“低”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制。
32.实施例:
33.如图1~4所示,一种用于飞行员平衡能力训练的固滚训练装置,包括固滚,还包括:
34.图像获取模块3,设于所述固滚上,用于获取飞行员训练过程中的行为状态图像、周边状态图像;
35.制动模块,设于所述固滚上,用于对所述旋转部1进行制动或解除制动使所述旋转部1停止转动或开启转动;
36.控制器4,接收所述行为状态图像信息、周边状态图像信息,并控制所述制动模块的开启或关闭,以及对转动圈数计数。
37.具体地,固滚包括旋转部1和支撑架,旋转部1设有大圆环和小圆环,小圆环上设置有手部抓握部和脚部支撑架。
38.图像获取模块3采集飞行员训练过程中的行为状态图像,包括飞行员的训练动作姿势,还会采集训练装置周边的危险状态图像。控制器4接收这些行为状态信息、周边状态信息,进行图像识别,判断飞行员的行为状态是否异常、飞行员周边环境是否有危险情况发生,若出现异常,控制器4会向制动模块发出控制指令,控制制动模块启动,进行制动,旋转部1停止旋转,训练停止。当飞行员的状态以及周边环境恢复后,控制器4控制制动模块关闭,制动解除,旋转部1重新转动,训练继续。其中控制器4可以采用的型号为stm32f373vct6。
39.通过设置图像获取模块3和控制器4,可以实时监测训练过程,对于发生的异常情况,如飞行员自身身体异常导致的行为状态异常,或者训练环境中出现的意外事故,可以实时进行识别,并根据识别出的异常控制制动模块启动,使旋转部1迅速停止转动,从而确保训练人员的人身安全。同时当训练结束,控制系统也会控制制动模块启动,进而停止训练。相比于现有的固滚需要人工进行制动,以及现有的固滚上的刹车系统需要人工操作才可以启动,存在滞后性,本实施例提供的固滚训练装置可以实现智能制动,用时短,制动反馈迅速,同时当异常或危险解除可以自动解除制动,使训练继续进行。既能确保训练过程的安全,又可以节省人力。通过获得的训练人员的行为状态图像,控制器4还可以进行计数,计数准确。
40.在一实施例中,固滚训练装置还包括第一转轴5,所述制动模块包括第二转轴601、电机602,所述电机602的动力输出端固定连接所述第二转轴601,第一转轴5、第二转轴601
转动连接所述固滚的支撑架,所述第二转轴601远离所述电机602的一端固定连接所述固滚的旋转部1,电机602连接所述控制器4。
41.具体地,在支撑架上设置有与第一转轴5、第二转轴601配合的通孔,在通孔内可以设置轴承,第一转轴5、第二转轴601与轴承配合实现与支撑件的转动连接,第二转轴601与电机602固定连接,且第二轴承远离电机602的一端与旋转部1固定连接,同时第一转轴5也与旋转部1固定连接。
42.制动模块的启动为电机602停止工作,制动模式的关闭为电机602开启工作。当需要进行制动时,控制器4控制电机602停止工作,则转轴停止转动使旋转部1停止转动;当解除制动时,控制器4控制电机602启动,则转轴转动带动旋转部1转动,训练开始。
43.电机602采用伺服电机602,且伺服电机602优选电压小于36v的大型电池供电的直流伺服电机602,也可直接使用220v的交流伺服电机602。
44.在一实施例中,所述电机602、图像获取模块3安装在固滚支撑架的支撑板7上,所述图像获取模块3安装在所述支撑板7上;
45.所述图像获取模块3包括第一摄像头301、第二摄像头302,所述第一摄像头301、第二摄像头302设于所述支撑板7的两侧,并与所述控制器4连接。
46.支撑板7用于安放电机602,支撑板7的一端固定有固定杆,固定杆的两端分别安装第一摄像头301、第二摄像头302。第一摄像头301、第二摄像头302将拍摄的图像传输给控制器4。第一摄像头301、第二摄像头302共同配合获取更加全面、广泛的图像信息。
47.在一实施例中,还包括显示模块8,连接所述控制器4,所述控制器4、第二摄像头302均内置于所述显示模块8内。
48.具体地,显示模块8可以采用型号为mip131pin的显示屏,第一摄像头301、第二摄像头302的型号为imx333。控制器4与第二摄像头302均内置于显示屏内,显示屏固定安装在固定杆上。
49.在又一实施例中,所述显示模块8为人机交互式触摸屏,用于输入训练量控制指令。如可以采用mip131pin型号的触摸屏,可以显示也可以实现人机交互,通过人机交互输入控制指令并传输至控制器4,由控制器4根据控制指令控制制动模块的工作。在进行训练时,可以通过显示模块8选择训练量(包括训练时长、训练圈数),控制器4根据设置的训练量,控制制动模块中的电机602的工作,当达到训练量时制动开启,电机602停止工作,训练停止,当训练者退下固滚后,控制器4控制电机602以1转每分钟的速度将旋转部1转动到初始状态。
50.同时,图像获取模块3还可以进行人脸识别,将识别信息传输给控制器4进行处理分析,进行训练员信息的录入,可以知晓训练人员信息。
51.在又一实施例中,还包括压力监测器9,所述压力监测器9设于所述固滚旋转部1上,所述压力监测器9连接所述控制器4。
52.所述压力监测器9为薄膜式压力传感器,多个压力传感器等间距间隔分布在所述固滚的抓握部和脚部支撑架(在图中未示出)。压力传感器的型号为zd10-100系列。相间隔的压力传感器之间的间距为1cm。
53.所述抓握部包括第一部101和第二部102,所述第一部101上间隔设置的压力传感器沿第一部101周面的分布区域长度为10cm,所述第二部102上间隔设置的压力传感器沿第
二部102周面的分布区域长度为20cm。第一部101和第二部102均有两个,两个第一部101上的压力传感器分别记为9-1、9-2,两个第二部102上的压力传感器分别记为9-3、9-4。训练者在训练时,抓握住两个第一部101,或者抓握住两个第二部102,会产生压力数据,当抓握不稳时,所产生的压力数据就会减小,当压力降至小于设定值时,训练者状态异常,需进行训练停止,控制器4判断出压力数据太小时,就会控制制动模块的启动,停止训练,从而确保训练者的安全。当训练员重新上固滚,压力增加并达到设定值时,制动解除,电机602工作重新开始训练。
54.在又一实施例中,还包括心率监测器10,所述心率监测器10通过无线传输方式连接所述控制器4。心率监测器10可以采用型号为华为、小米系列的心率监测环,佩戴在训练员手上,通过蓝牙或无线wifi的方式将监测到的心率数据发送至控制器4,当监测到心率大于设定值,则控制器4会控制制动模块开启,停止旋转部1的转动,停止训练,从而确保训练者的安全。当训练者重新开始训练,心率达到安全范围,制动解除,电机602启动。
55.在又一实施例中,还包括数据存储端11,连接所述控制器4。将训练过程中的图像信息、训练量、手部握持的压力数据、心率数据进行存储,以供后续查看。数据存储端11可以为云存储端,也可以是数据存储器。
56.另外还设置有供电模块,可以是各个模块单独设置供电模块,也可以对各个模块进行统一供电,具体的供电方式可以根据需要进行选取,且为已知技术。另本实用新型中未提及的过程、方法等均属于本领域现有技术,在此不进行赘述。
57.以上的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上仅为本实用新型的具体实施方式而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1