驱动机构的制作方法
1.本公开涉及一种驱动机构。
背景技术:
2.随着科技的发展,现今许多电子装置(例如智能手机或数字相机)皆具有照相或录影的功能。这些电子装置的使用越来越普遍,并朝着便利和轻薄化的设计方向进行发展,以提供使用者更多的选择。
3.前述具有照相或录影功能的电子装置通常设有驱动机构,以驱动光学元件(例如为镜头)沿着光轴进行移动,进而达到自动对焦(auto focus,af)或光学防手震(optical image stablization,ois)的功能。光线可穿过前述光学元件在感光元件上成像。然而,现今移动装置的趋势是希望可具有较小的体积并且具有较高的耐用度,因此如何有效地降低驱动机构的尺寸以及提升其耐用度始成为一重要的课题。
技术实现要素:
4.本公开的目的在于提出一种驱动机构,以解决上述至少一个问题。
5.本公开实施例提供一种驱动机构,包括固定部、活动部、驱动组件、电路组件以及信号调整组件。活动部可相对固定部运动。驱动组件用以驱动活动部相对固定部运动,驱动组件接收由控制组件所输出的第一信号。驱动组件经由电路组件电性连接控制组件。信号调整组件电性连接驱动组件。信号调整组件用以调整第一信号。
6.在一些实施例中,驱动组件包括第一驱动元件、第二驱动元件,第一驱动元件用以对活动部产生第一驱动力。第二驱动元件用以对活动部产生第二驱动力。电路组件包括第一电路、第二电路。第一驱动元件、第二驱动元件电性连接第一电路。第一驱动元件、第二驱动元件电性连接第二电路。第一电路可经由驱动组件电性连接第二电路。第一驱动元件可经由第一电路电性连接控制组件。第二驱动元件可经由第一电路电性连接控制组件。第一驱动元件经由第二电路电性连接控制组件。第二驱动元件经由第二电路电性连接控制组件。
7.在一些实施例中,电路组件还包括第三电路、第四电路、本体。第三电路电性连接第一驱动元件。第四电路电性连接第二驱动元件。本体具有板状结构。第一电路可经由第三电路电性连接第二电路。第一电路可经由第四电路电性连接第二电路。第三电路电性连接信号调整组件。信号调整组件经由第三电路电性连接第一电路或第二电路。第四电路电性连接信号调整组件。信号调整组件经由第四电路电性连接第一电路或第二电路。驱动机构还包括第一夹持元件、第二夹持元件。第一夹持元件用以固定具有长条形结构的第一驱动元件的第一端。第二夹持元件用以固定具有长条形结构的第二驱动元件的第二端。第一夹持元件具有板状结构。第一夹持元件电性连接第三电路。第二夹持元件具有板状结构。第二夹持元件电性连接第四电路。固定部还包括外框以及底座,形成容纳空间用以容纳活动部。外框包括顶壁以及侧壁。电路组件位于容纳空间。控制组件位于容纳空间。第一电路、第二
电路、第三电路、第四电路设置于本体。
8.在一些实施例中,活动部用以连接光学元件。第一驱动元件包括形状记忆合金。第二驱动元件包括形状记忆合金。控制组件还包括第一感测组件、第二感测组件,用以感测活动部相对固定部的运动。控制组件根据第一感测组件的感测结果,以输出第一信号。控制组件根据第二感测组件的感测结果,以输出第一信号。
9.在一些实施例中,信号调整组件用以将第一信号调整为第二信号输入至第一驱动元件。信号调整组件用以将第一信号调整为第三信号输入至第二驱动元件。第二信号具有正向的电压或电流,或者具有负向的电压或电流。第三信号具有正向的电压或电流,或者具有负向的电压或电流。信号调整组件包括第一电子元件以及第二电子元件。第一电子元件具有整流功能。第一电子元件电性连接第三电路以及第一驱动元件。第二电子元件具有整流功能。第二电子元件电性连接第四电路以及第二驱动元件。以第一电路为基准时,第一电子元件与第二电子元件的整流方向相反。
10.在一些实施例中,第一信号在第一时序包括第一信息。第一信号在第二时序包括第二信息。第一时序与第二时序位于不同的时间点。于第一时序时,包括第一信息的第一信号通过第一电子元件而到达第一驱动元件。于第二时序时,包括第二信息的第一信号通过第二电子元件而到达第二驱动元件。
11.在一些实施例中,驱动组件还包括第三驱动元件,用以对活动部产生第三驱动力。第三驱动元件电性连接第一电路。第三驱动元件可电性连接第二电路。第三电路可经由第三驱动元件电性连接第二电路。第三驱动元件经由第一电路电性连接控制组件。第三驱动元件可经由第二电路电性连接控制组件。电路组件还包括第五电路,电性连接第三驱动元件。第一电路可经由第五电路电性连接第二电路。第五电路电性连接信号调整组件。信号调整组件经由第五电路电性连接第一电路或第二电路。第三驱动元件包括形状记忆合金。
12.在一些实施例中,信号调整组件包括第一切换元件,电性连接第三电路,用以控制第一电路是否经由第三电路电性连接第二电路。第一切换元件包括第一通路电路以及第一控制电路。第一通路电路电性连接第三电路。第一控制电路用以控制第一通路电路是否导通。第一控制电路接收控制组件所输出的第一控制信号。第一信号在一第一时序包括第一信息,在第二时序包括一第二信息,第一时序与第二时序位于不同的时间点。第一切换元件用以根据第一控制信号来进行控制,使第一信息输入至第一驱动元件。第一切换元件用以根据第一控制信号来进行控制,使第二信息不输入至第一驱动元件。
13.在一些实施例中,信号调整组件还包括第二切换元件,电性连接第四电路,用以控制第一电路是否经由第四电路电性连接第二电路。第二切换元件包括第二通路电路以及第二控制电路。第二通路电路电性连接第四电路。第二控制电路,用以控制第二通路电路是否导通。第二控制电路接收控制组件所输出的第二控制信号。第二切换元件用以根据第二控制信号来进行控制,使第一信息不输入至第二驱动元件。第二切换元件用以第二控制信号来进行控制,使第二信息输入至第二驱动元件。
14.在一些实施例中,信号调整组件还包括第三切换元件,电性连接第五电路,用以控制第一电路是否经由第五电路电性连接第二电路。第三切换元件包括第三通路电路、第三控制电路。第三通路电路电性连接第五电路。第三控制电路用以控制第三通路电路是否导通。第三控制电路接收控制组件所输出的第三控制信号。第一信号在第三时序包括第三信
息,第三时序与第一时序、第二时序位于不同的时间点。第三切换元件用以根据第三控制信号来进行控制,使第三信息输入至第三驱动元件。第三切换元件用以根据第三控制信号来进行控制,使第一信息不输入至第三驱动元件。第三切换元件用以根据第三控制信号来进行控制,使第二信息不输入至第三驱动元件。
15.在一些实施例中,第一切换元件还包括第二通路电路,电性连接第四电路。第一控制电路用以控制第二通路电路是否导通。第一信号在第一时序包括第一信息,在第二时序包括第二信息,第一时序与第二时序位于不同的时间点。第一切换元件用以控制使第一信息输入或不输入至第一驱动元件。第一切换元件用以控制使第二信息输入或不输入至第二驱动元件。
16.在一些实施例中,第一切换元件还包括第三通路电路,电性连接第五电路。第一控制电路用以控制第三通路电路是否导通。第一信号在第三时序包括第三信息,第三时序与第一时序、第二时序位于不同的时间点。第一切换元件用以控制使第三信息输入至第三驱动元件。第一切换元件用以控制使第一信息不输入至第三驱动元件。第一切换元件用以控制使第二信息不输入至第三驱动元件。
17.本公开的有益效果在于,本公开所公开各元件的特殊相对位置、大小关系不但可使驱动机构达到特定方向的薄型化、整体的小型化,另外经由搭配不同的光学模块使系统更进一步提升光学品质(例如拍摄品质或是深度感测精度等),更进一步地利用各光学模块达到多重防震系统以大幅提升防手震的效果。
附图说明
18.以下将配合所附附图详述本公开的实施例。应注意的是,依据在业界的标准做法,多种特征并未按照比例示出且仅用以说明例示。事实上,可能任意地放大或缩小元件的尺寸,以清楚地表现出本公开的特征。
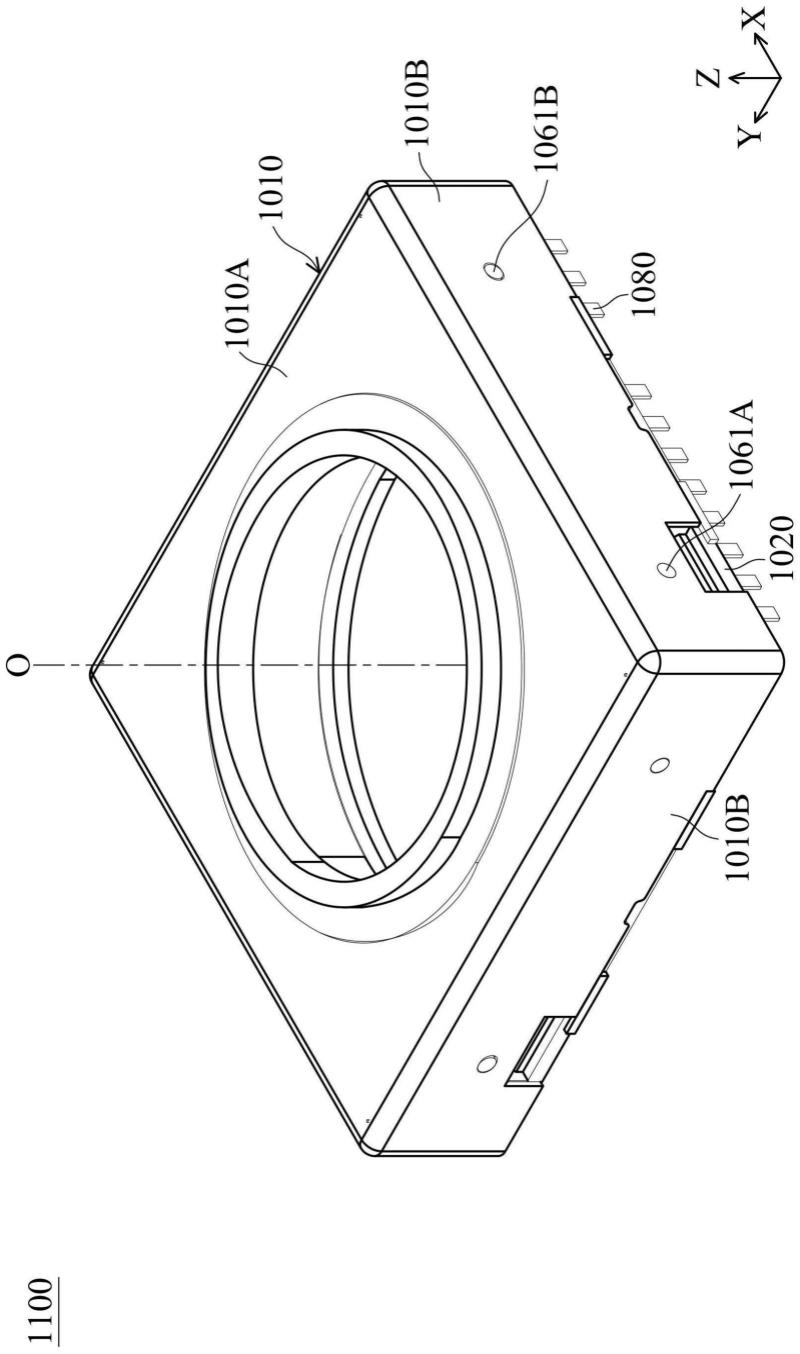
19.图1a是根据本公开一些实施例示出的光学元件驱动机构的示意图。
20.图1b是光学元件驱动机构的爆炸图。
21.图1c是光学元件驱动机构的剖面图。
22.图1d是光学元件驱动机构的侧视图。
23.图1e是光学元件驱动机构的仰视图。
24.图2a是光学元件驱动机构省略外框的示意图。
25.图2b是图2a的俯视图。
26.图2c是图2a的侧视图。
27.图2d是图2c的放大图。
28.图2e是图2a的元件进一步省略承载座的示意图。
29.图2f是光学元件驱动机构中的第一位置感测元件、第二位置感测元件、第三位置感测元件、第四位置感测元件的示意图。
30.图3a是光学元件驱动机构一些元件的示意图。
31.图3b是图3a的放大图。
32.图3c是驱动元件的示意图。
33.图3d是驱动元件相对于基底单元推动框架时的示意图。
34.图3e是驱动元件相对于框架推动承载座的示意图。
35.图3f是本公开另一些实施例中的驱动元件配置方式的示意图。
36.图4a是驱动机构一些元件电性连接时的示意图。
37.图4b是驱动机构一些元件电性连接时的示意图。
38.图4c是驱动机构一些元件电性连接时的示意图。
39.图4d是驱动机构一些元件电性连接时的示意图。
40.图4e示出第一切换元件与第一通路电路进行导通的状况。
41.图4f示出第一切换元件与第二通路电路进行导通的状况。
42.图4g示出第一切换元件与第三通路电路进行导通的状况。
43.图5a至图5d为本公开一些实施例的信号的示意图。
44.附图标记如下:
45.1010:外框
46.1010a:顶面
47.1010b:侧壁
48.1011:第一定位结构
49.1012:第二定位结构
50.1020:底座
51.1022,1023,1024:开口
52.1025,1026:凸出部
53.1030:承载座
54.1032:延伸部
55.1040:框架
56.1521,1541:驱动单元
57.15211,15212:端部
58.1522,1542:弹性单元
59.1523,1543:连接单元
60.1524,1544:缓冲单元
61.1525,1545:接触单元
62.1526,1546:接触部
63.1527,1547,1528,1548:制震单元
64.1060:基底单元
65.1061a:第三定位结构
66.1061b:第四定位结构
67.1621,1623:止动部
68.1624:凹部
69.1070:第一弹性元件
70.1072:第二弹性元件
71.1074:第三弹性元件
72.1080:电路
73.1082:第一位置感测元件
74.1084:第二位置感测元件
75.1086:第三位置感测元件
76.1088:第四位置感测元件
77.1089:第五位置感测元件
78.1100:光学元件驱动机构
79.c:控制单元
80.d,2100,3100,4100,5100:驱动组件
81.e1:第一侧边
82.e2:第二侧边
83.e3:第三侧边
84.e4:第四侧边
85.f:固定部
86.m:活动部
87.o:主轴
88.s1:第一位置感测组件
89.s2:第二位置感测组件
90.2101,3101,4101,5101:第一驱动元件
91.2102,3102,4102,5102:第二驱动元件
92.2200,3200,4200,5200:电路组件
93.2201,3201,4201,5201:第一电路
94.2202,3202,4202,5202:第二电路
95.2203,3203,4203,5203:第三电路
96.2204,3204,4204,5204:第四电路
97.2300,3300,4300,5300:信号调整组件
98.2301,3301:第一电子元件
99.2302,3302:第二电子元件
100.2400,3400,4400,5400:控制组件
101.2501,3501,4501,5501:第一信号
102.2502,3502,4502,5502:第二信号
103.2503,3503,4503,5503:第三信号
104.2601,3601,4601,5601:第一夹持元件
105.2602,3602,4602,5602:第二夹持元件
106.3103,4103,5103:第三驱动元件
107.3205,4205,5205:第五电路
108.3303:第三电子元件
109.3504,4504,5504:第四信号
110.3603,4603,5603:第三夹持元件
111.4301,5301:第一切换元件
112.4302:第二切换元件
113.4311,5311:第一控制电路
114.4312:第二控制电路
115.4313:第三控制电路
116.4321,5321:第一通路电路
117.4322,5322:第二通路电路
118.4323,5323:第三通路电路
119.6101,6201,6301,6401:第一信息
120.6102,6202,6302:第二信息
121.6103,6203,6303:第三信息
具体实施方式
122.以下公开许多不同的实施方法或是范例来实行所提供的不同特征,以下描述具体的元件及其排列的实施例以阐述本公开。当然这些实施例仅用以例示,且不该以此限定本公开的范围。举例来说,在说明书中提到第一特征部件形成于第二特征部件之上,其可包括第一特征部件与第二特征部件是直接接触的实施例,另外也可包括于第一特征部件与第二特征部件之间另外有其他特征的实施例,换句话说,第一特征部件与第二特征部件并非直接接触。
123.此外,在不同实施例中可能使用重复的标号或标示,这些重复仅为了简单清楚地叙述本公开,不代表所讨论的不同实施例及/或结构之间有特定的关系。此外,在本公开中的在另一特征部件之上形成、连接到及/或耦接到另一特征部件可包括其中特征部件形成为直接接触的实施例,并且还可包括其中可形成插入上述特征部件的附加特征部件的实施例,使得上述特征部件可能不直接接触。此外,其中可能用到与空间相关用词,例如“垂直的”、“上方”、“上”、“下”、“底”及类似的用词(如“向下地”、“向上地”等),这些空间相关用词为了便于描述图示中一个(些)元件或特征与另一个(些)元件或特征之间的关系,这些空间相关用词旨在涵盖包括特征的装置的不同方向。
124.除非另外定义,在此使用的全部用语(包括技术及科学用语)具有与此篇公开所属的本领域技术人员所通常理解的相同涵义。能理解的是这些用语,例如在通常使用的字典中定义的用语,应被解读成具有一与相关技术及本公开的背景或上下文一致的意思,而不应以一理想化或过度正式的方式解读,除非在此有特别定义。
125.再者,说明书与权利要求中所使用的序数例如“第一”、“第二”等的用词,以修饰权利要求的元件,其本身并不意含及代表该请求元件有任何之前的序数,也不代表某一请求元件与另一请求元件的顺序、或是制造方法上的顺序,多个所述序数的使用仅用来使具有某命名的一请求元件得以和另一具有相同命名的请求元件能作出清楚区分。
126.此外,在本公开一些实施例中,关于接合、连接的用语例如“连接”、“互连”等,除非特别定义,否则可指两个结构直接接触,或者亦可指两个结构并非直接接触,其中有其它结构设于此两个结构之间。且此关于接合、连接的用语亦可包括两个结构都可移动,或者两个结构都固定的情况。
127.首先,请参阅图1a至图1d。图1a是根据本公开一些实施例示出的驱动机构1100的
示意图,图1b是驱动机构1100的爆炸图,图1c是驱动机构1100的剖面图,图1d是驱动机构1100的侧视图,而图1e是驱动机构1100的仰视图。
128.如图1b所示,驱动机构1100主要可包括外框1010、底座1020、承载座1030、框架1040、驱动元件1052、驱动元件1054、基底单元1060、第一弹性元件1070、第二弹性元件1072。其中,外框1010、底座1020、基底单元1060可合称为固定部f,承载座1030、框架1040可合称为活动部m,而驱动元件1052、驱动元件1054可合称为驱动组件d。
129.活动部m可用以承载一光学元件(未示出),并且可相对于固定部f运动。前述光学元件例如可为透镜(lens)、反射镜(mirror)、棱镜(prism)、分光镜(beam splitter)、光圈(aperture)等光学元件,或者亦可为相机模块或深度感测器等。此外,驱动组件d可用以驱动活动部m相对固定部f运动。由此,驱动机构1100可用以驱动光学元件在各个方向上移动,以达到自动对焦(auto focus,af)或光学防手震(optical image stabilization,ois)的功能。
130.前述外框1010与底座1020可相互结合而构成驱动机构1100的外壳。举例来说,底座1020可固定地连接外框1010。应了解的是,外框1010及底座1020上分别形成有外框开口及底座开口,其中外框开口的中心对应于光学元件的光轴,底座开口则对应于设置在驱动机构1100之外的图像感测元件(图未示);据此,设置于驱动机构1100中的光学元件可在光轴方向与图像感测元件进行对焦。此外,沿着主轴o延伸的方向观察时,固定部f具有多边形的结构。
131.前述承载座1030具有一贯穿孔,光学元件可固定于此贯穿孔内,驱动元件1052设置于框架1040以及基底单元1060之间,例如设置在基底单元1060上。驱动元件1054设置于承载座1030以及框架1040之间,例如设置在框架1040上。然而,本公开并不以此为限。举例来说,驱动元件1052亦可设置在框架1040上,或驱动元件1054可设置在承载座1030上,取决于设计需求。
132.在本实施例中,承载座1030及其内的光学元件活动地(movably)设置于框架1040内。更具体而言,承载座1030可通过金属材质的第一弹性元件1070及第二弹性元件1072连接框架1040并悬吊于框架1040内。当前述驱动元件1052通电时,驱动元件1052会驱使承载座1030、框架1040和前述光学元件相对于固定部f在各个方向上移动,从而可达到光学防手震的效果。当前述驱动元件1054通电时,驱动元件1054会驱使承载座1030和前述光学元件相对于框架1040沿主轴o方向移动,从而可达到自动对焦的效果。
133.在一些实施例中,底座1020上可具有额外的电路1080,其电性连接设置于驱动机构1100内部或外部的其他电子元件,用以执行自动对焦(af)及光学防手震(ois)等功能,且底座1020的材料可包括绝缘材料(例如不包括金属)。在一些实施例中,电路1080可设置在额外的本体(例如电路板,未示出)上。本体可具有板状的结构,以容纳电路1080。
134.底座1020上的电路1080亦可以通过第一弹性元件1070或者是第二弹性元件1072而将电信号传送至驱动元件1052、驱动元件1054,由此可用以控制活动部m在x、y或z轴方向上的移动。
135.组装时可利用焊接(soldering)或激光熔接(laser welding)的方式,使第二弹性元件1072和底座1020上的导线结合,从而使得驱动元件1052、驱动元件1054可以电性连接到外部的电路。
136.在一些实施例中,外框1010可包括顶壁1010a以及从顶壁1010a的侧边朝向底座1020在z方向上延伸的侧壁1010b。基底单元1060可固定在侧壁1010b上,例如可通过接着元件(未示出)固定。如图1d所示,侧壁1010b可具有第一定位结构1011以及第二定位结构1012,分别对应于基底单元1060的第三定位结构1061a以及第四定位结构1061b。举例来说,第一定位结构1011以及第二定位结构1012可为开口,而第三定位结构1061a以及第四定位结构1061b可从基底单元1060突出并且分别位在第一定位结构1011以及第二定位结构1012中。
137.在一些实施例中,第一定位结构1011在x方向上的长度与第二定位结构1012在x方向上的长度不同,也就是说第一定位结构1011与第三定位结构1061a之间的最大间隙与第二定位结构1012与第四定位结构1061b之间的最大间隙的大小不同。例如第一定位结构1011在x方向上的长度可小于第二定位结构1012在x方向上的长度,从而第一定位结构1011与第三定位结构1061a之间的最大间隙大于第二定位结构1012与第四定位结构1061b之间的最大间隙。在一些实施例中,前述接着元件可设置在第一定位结构1011以及第二定位结构1012中,并直接接触第三定位结构1061a以及第四定位结构1061b,从而固定外框1010与基底单元1060的相对位置。在一些实施例中,接着元件例如可为胶水。
138.在一些实施例中,如图1e所示,驱动机构1100中可设置第一位置感测元件1082、第二位置感测元件1084、第三位置感测元件1086,并且可在活动部m上设置对应的磁性元件(未示出)。举例来说,底座1020上可具有开口1022、1023、1024,而第一位置感测元件1082、第二位置感测元件1084、第三位置感测元件1086分别可设置在开口1022、1023、1024中,以感测活动部m相对于固定部f在不同维度上的运动。举例来说,可用以感测框架1040相对于固定部f的运动。在一些实施例中,第一位置感测元件1082、第二位置感测元件1084、第三位置感测元件1086可合称为第一位置感测组件s1。
139.前述第一位置感测元件1082、第二位置感测元件1084、第三位置感测元件1086可包括霍尔效应感测器(hall sensor)、磁阻效应感测器(magnetoresistance effect sensor,mr sensor)、巨磁阻效应感测器(giant magnetoresistance effect sensor,gmr sensor)、穿隧磁阻效应感测器(tunneling magnetoresistance effect sensor,tmr sensor)、或磁通量感测器(fluxgate sensor)。
140.在一些实施例中,第一位置感测元件1082可用以感测框架1040相对于固定部f在第一维度上的运动,第二位置感测元件1084可用以感测框架1040相对于固定部f在第二维度上的运动,第三位置感测元件1086可用以感测框架1040相对于固定部f在第三维度上的运动。在一些实施例中,在第一维度上的运动可为沿着一第八方向(例如为x方向)的运动,在第二维度上的运动可为沿着一第九方向(例如为y方向)的运动,在第三维度上的运动可为沿着一第十方向(例如为y方向)的运动。在一些实施例中,前述第八方向可与第九方向或第十方向不平行,而第九方向可与第十方向平行。
141.此外,第一位置感测组件s1亦可用于感测活动部m相对固定部f在第四维度上的运动。举例来说,在一些实施例中,第四维度上的运动可为以在第十一方向(主轴o的延伸方向)延伸的轴为转轴的转动,即第四维度上的运动可为以主轴o为转轴的转动。应注意的是,第十一方向(例如为z方向)与第八方向(例如为x方向)不平行,例如第十一方向可与第八方向垂直。第十一方向与第九方向(例如为y方向)不平行,例如第十一方向可与第九方向垂
直。该第十一方向与第十方向(例如为y方向)不平行,例如第十一方向可与第十方向垂直。
142.如图1e所示,沿着主轴o方向观察时,固定部f具有第一侧边e1、第二侧边e2、第三侧边e3、第四侧边e4。第一位置感测元件1082位于第一侧边e1,第二位置感测元件1084位于第二侧边e2,而第三位置感测元件1086可位于第一侧边e1或第三侧边e3。举例来说,在图1e中,第三位置感测元件1086可以设置在第三侧边e3,但并不以此为限,在其他实施例中,亦可将第三位置感测元件1086设置在第一侧边e1。通过第一位置感测元件1082、第二位置感测元件1084、第三位置感测元件1086,可感测活动部m相对固定部f在第四维度上的运动。在一些实施例中,第一位置感测组件s1亦可经由第一位置感测元件1082以及第二位置感测元件1084两者的信号,来感测活动部m相对固定部f在第一维度上的运动,以得到更加精确的感测效果。
143.图2a是驱动机构1100省略外框1010的示意图,图2b是图2a的俯视图,图2c是图2a的侧视图,而图2d是图2c的放大图。在一些实施例中,驱动机构1100在角落处还可包括第三弹性元件1074,第三弹性元件1074用以活动地连接框架1040与固定部f,从而允许框架1040以及设置在框架1040中的承载座1030悬吊在固定部f中。此外,第三弹性元件1074还可直接接触第一弹性元件1070以及电路1080,以允许驱动元件1054通过第一弹性元件1070、第三弹性元件1074、电路1080与外界进行电性连接。
144.在一些实施例中,如图2b所示,沿着主轴o的方向观察时,固定部f具有多边形的形状,而第三弹性元件1074可位在固定部f的角落处,并且可电性连接设置在底座1020中的电路,并且可电性连接第一弹性元件1070。此外,第一弹性元件1070可具有板状的结构,第三弹性元件1074可具有线状的结构,并且第三弹性元件1074的延伸方向(z方向)可与第一弹性元件1070的厚度方向(z方向)平行。
145.此外,在一些实施例中,承载座1030上可具有延伸部1032,从承载座1030的径向外侧表面朝向垂直主轴o延伸的方向延伸。此外,如图2b至图2d所示,在主轴o延伸的方向上,延伸部1032与驱动元件1054至少部分重叠,例如与接触单元1545在主轴o延伸的方向上排列。由此,可通过驱动元件1054推动延伸部1032,以允许承载座1030在主轴o延伸的方向上移动,达到自动对焦的功能。驱动元件1054推动延伸部1032的方式将于随后详细描述。此外,在主轴o延伸的方向上,驱动元件1054与第一弹性元件1070可不重叠,从而可降低驱动机构1100在z方向上的尺寸,而达到小型化。
146.图2e是图2a的元件进一步省略承载座1030的示意图。如图2e所示,驱动机构1100还可进一步包括第二位置感测组件s2。第二位置感测组件s2可包括设置在框架1040上的第四位置感测元件1088、第五位置感测元件1089以及设置在承载座1030上对应的磁性元件(未示出)。由此,当承载座1030相对于框架1040进行运动时,第四位置感测元件1088、第五位置感测元件1089可感测承载座1030上的磁性元件运动时的磁场变化,进而得到承载座1030相对于框架1040的运动量。
147.换句话说,第二位置感测组件s2可用以感测承载座1030相对框架1040的运动。举例来说,第二位置感测组件s2用以感测承载座1030相对框架1040在第五维度上的运动。应注意的是,第五维度上的运动为沿着第十二方向(例如z方向)的运动。第十二方向与第八方向(例如x方向)不平行,或者第十二方向可与第八方向垂直。第十二方向与第九方向(例如y方向)不平行,或者第十二方向可与第九方向垂直。第十二方向与第十方向(例如y方向)不
平行,或者第十二方向与第十方向垂直。第十二方向与第十一方向(例如z方向)平行。此外,如图2e所示,第一弹性元件1070至少部分固定地设置在基底单元1060上。
148.图2f是驱动机构1100中的第一位置感测元件1082、第二位置感测元件1084、第三位置感测元件1086、第四位置感测元件1088、第五位置感测元件1089的示意图。沿着主轴o延伸的方向观察时,如图2f所示,第二位置感测组件s2的第四位置感测元件1088位于固定部f的角落,此角落由第一侧边e1与第二侧边e2组成。此外,沿着主轴o延伸的方向观察时,第二位置感测组件s2(第四位置感测元件1088、第五位置感测元件1089)与第一位置感测组件s1(第一位置感测元件1082、第二位置感测元件1084不重叠、第三位置感测元件1086)不重叠。由此,可避免各感测元件及其对应的磁性元件之间发生磁干扰,而可改善感测的精确度。
149.图3a是驱动机构1100一些元件的示意图,图3b是图3a的放大图,图3c是驱动元件1052或驱动元件1054的示意图。在一些实施例中,如图3a以及图3b所示,驱动机构1100在单个基底单元1060上可具有驱动元件1052,并且可设置一个或一个以上的驱动元件1052,以达到各种方向上的运动。举例来说,基底单元1060上可具有止动部1621、1623(止动组件的止动元件),朝向框架1040突起,并且在驱动元件1052的延伸方向上延伸。驱动元件1052可设置在止动部1621、1623之间,即止动部1621、1623围绕驱动元件1052,以保护驱动元件1052免于碰撞。
150.应注意的是,止动部1621、1623(止动组件)固定地设置在基底单元1060上,且基底单元1060可具有板状的结构以及塑胶的材质,并且沿着基底单元1060的厚度方向观察时,基底单元1060可具有多边形的结构(例如矩形),而止动部1621、1623可位在基底单元1060不同的侧边处。
151.如图3c所示,驱动元件1052可包括驱动单元1521、弹性单元1522、连接单元1523、缓冲单元1524、接触单元1525、接触部1526、制震单元1527、制震单元1528。驱动元件1054可包括驱动单元1541、弹性单元1542、连接单元1543、缓冲单元1544、接触单元1545、接触部1546、制震单元1547、制震单元1548。
152.在一些实施例中,驱动单元1521的材质可包括形状记忆合金(shape memory alloy,sma),并且具有长条形的形状并沿一方向延伸。形状记忆合金是一种在加热升温后能完全消除其在较低的温度下发生的变形,恢复其变形前原始形状的合金材料。举例来说,当形状记忆合金在低于相变态温度下,受到一有限度的塑性变形后,可通过加热的方式,使其恢复到变形前的原始形状。
153.在一些实施例中,当对驱动单元1521施加一信号(例如电压或电流)之后,可通过电流的热效应而增加温度,以降低驱动单元1521的长度。反之,若施加强度较弱的信号,由于加热的速率不及环境的散热速率,可降低温度,进而增加驱动单元1521的长度。
154.驱动单元1521可具有固定在连接单元1523上的端部15211以及固定在接触单元1525上的端部15212,而弹性单元1522具有可挠性,例如可包括金属的材质,从而当驱动单元1521进行收缩时,弹性单元1522可被驱动单元1521弯折。此外,由于驱动单元1521以及弹性单元1522皆可具有金属的材质,驱动单元1521可电性连接弹性单元1522,且驱动单元1521运作时产生的热量可通过弹性单元1522来排出。连接单元1523可固定在固定部f上,例如固定在基底单元1060上,并且可通过连接单元1523以允许驱动元件1052与外界进行电性
连接。应注意的是,如图3b所示,在主轴o延伸的方向(图2b)以及驱动单元1521延伸的第一方向上,驱动元件1052的驱动单元1521与止动部1621、1623至少部分重叠。
155.接触单元1525可通过缓冲单元1524活动地连接弹性单元1521。举例来说,缓冲单元1524可为具有长条形状的弹性单元1522与具有矩形形状或圆弧形状的接触单元1525(或可具有其他形状,并不限于此)的连接点,并且可进行弯折。此外,接触单元1525可用以接触活动部m(例如框架1040)或者固定部f(例如基底单元1060)。当驱动单元1521发生形变(缩短)时,弹性单元1522会被带动而发生形变(弯折),从而带动接触单元1525进行运动。在一些实施例中,接触单元1525的材料可包括金属,例如弹性单元1522、缓冲单元1524、接触单元1525可具有一体成形的结构,即可具有相同的材质。
156.在一些实施例中,接触单元1525在远离弹性单元1522的一端还可具有接触部1526。虽然图3c中的接触部1526示出为具有单一的结构,但本公开并不以此为限。举例来说,在一些实施例中,接触单元1525可包括多个接触部1526,并且接触部1526间可彼此隔开并通过接触单元1525进行连接。换句话说,多个接触部1526以及接触单元1525可具有一体成形的结构。
157.在一些实施例中,制震单元1527可设置在驱动单元1521以及弹性单元1522之间,例如可设置在驱动单元1521的中点以及弹性单元1522的中点之间,而制震单元1528可设置在驱动单元1521的端部15211上,并且制震单元1527、制震单元1528可直接接触驱动单元1521、弹性单元1522,以吸收驱动单元1521以及弹性单元1522形变时过大的震动,而避免驱动单元1521或弹性单元1522发生断裂。
158.在一些实施例中,制震单元1527或制震单元1528的材质可包括软性树脂,即制震单元1527或制震单元1528的杨氏模数(young’s modulus)可小于基底单元1060的杨氏模数。
159.驱动元件1054中的驱动单元1541、弹性单元1542、连接单元1543、缓冲单元1544、接触单元1545、接触部1546、制震单元1547、制震单元1548的结构与功效分别与前述驱动单元1521、弹性单元1522、连接单元1523、缓冲单元1524、接触单元1525、接触部1526、制震单元1527、制震单元1528相似或相同,于此不再赘述。
160.图3d是驱动元件1052相对于基底单元1060推动框架1040时的示意图,而图3e是驱动元件1054相对于框架1040推动承载座1030的示意图。如图3d所示,当驱动元件1052的驱动单元1521进行收缩时,会带动弹性单元1522进行形变。由于连接单元1523固定在基底单元1060上,仅有接触单元1525会被驱动单元1521带动进行移动,例如朝向框架1040移动。当接触单元1525移动到接触框架1040之后,接触单元1525可对框架1040施加一驱动力,此驱动力的方向(从基底单元1060朝向框架1040)与驱动单元1521在静止时的延伸方向不同。举例来说,若驱动单元1521在静止时朝向x方向延伸,则驱动力的方向可为垂直x方向的y方向,以允许框架1040朝向y方向移动。
161.如图3e所示,当驱动元件1054的驱动单元1541进行收缩时,会带动弹性单元1542进行形变。由于连接单元1543固定在框架1040上,仅有接触单元1545会被驱动单元1541带动进行移动,例如朝向承载座1030的延伸部1032移动。当接触单元1545移动到接触延伸部1032之后,接触单元1545可对承载座1030施加一驱动力,此驱动力的方向(从框架1040朝向延伸部1032)与驱动单元1541在静止时的延伸方向不同。举例来说,若驱动单元1541在静止
时朝向xy平面上的一方向延伸(图2b),则驱动力的方向可为垂直此方向的z方向,以允许承载座1030朝向z方向移动。
162.虽然图3b中的两个驱动元件1052朝向相同的方向延伸,但本公开并不以此为限。举例来说,图3f是本公开另一些实施例中的驱动元件1052配置方式的示意图,其中上下两个驱动元件1052朝向相反的方向延伸。由此,两个驱动元件1052的接触单元1525可在不同的位置推动框架1040,以对框架1040产生不同的力矩,进而可同时进行移动与转动。
163.此外,请回头参照图3b,当框架1040相对于固定部f(例如基底单元1060)运动时,由于止动部1621、1623朝向框架1040突出,所以止动部1621、1623可以用来定义框架1040可运动的一限定范围。举例来说,限定范围中可具有第一位置以及第二位置。当框架1040(活动部m)相对基底单元1060(固定部f)位于第一位置时,驱动元件1052未接触框架1040。当框架1040相对基底单元1060位于第二位置时,驱动元件1052可直接接触框架1040以及基底单元1060。
164.在一些实施例中,基底单元1060上还可具有凹部1624,与接触单元1525对应(例如在垂直主轴o延伸的方向上重叠)。由此,当驱动单元1521不收缩时,弹性单元1522回到如图3b所示的形状,而凹部1624可避免接触单元1525在弹性单元1522变形时直接接触基底单元1060,进而保护接触单元1525。此外,凹部1624的材料不包括导电材料,例如不包括金属,以避免当与接触单元1525直接接触时发生短路。
165.应注意的是,在一些实施例中,当驱动组件d驱动活动部m相对固定部f在第一维度运动时(在x方向的平移运动),驱动组件d亦可同时驱动活动部m相对固定部f在第六维度上运动,而第六维度上的运动为以光学元件的光轴为转轴的转动。应注意的是,此处的光学元件的光轴可与前述主轴o不同。举例来说,当驱动组件d驱动活动部m相对固定部f在第一维度运动时,可带动光学元件,使光轴相对主轴o运动。由此,可允许活动部m相对于固定部f在更多维度上进行运动,以进一步加强光学防手震的效果。
166.在一些实施例中,当驱动组件d驱动活动部m相对固定部f仅在该第一维度运动时,活动部m仅可在第一维度于框架1040可运动的限定范围中的第一极限范围内运动。举例来说,若活动部m在x方向上运动,则可将第一极限范围定义为活动部m在x方向上的最大可移动范围。接着,当驱动组件d驱动活动部m相对固定部f同时在第一维度以及第六维度上运动时,在第一维度上,活动部m仅可在限定范围中的第二极限范围内运动。应注意的是,在第一维度上,第一极限范围大于第二极限范围,且限定范围大于第一极限范围。换句话说,若活动部m除了第一维度上的运动之外,同时在第六维度上进行运动,则活动部m在第一维度上的可动范围会随之降低。
167.当活动部m相对固定部f于第一极限范围内运动时,止动部1621、1623(止动组件)与活动部m以及固定部f至少一者未直接接触。在本实施例中,止动部1621、1623设置在固定部f上,故当活动部m位在第一极限范围时,止动部1621、1623并不会直接接触活动部m。然而,本公开并不以此为限。举例来说,亦可将止动组件设置在活动部m上。在这种实施例中,当活动部m位在第一极限范围时,活动部m上的止动组件并不会直接接触固定部f。由此,可避免活动部m与固定部f直接发生碰撞而发生损坏。
168.在一些实施例中,当驱动组件d驱动活动部m相对固定部f仅在第六维度运动时,在第六维度上,活动部m仅可于限定范围中的第三极限范围内运动。当驱动组件d驱动活动部m
相对固定部f同时在第一维度以及第六维度运动时,在第六维度上,活动部m仅可在限定范围中的第四极限范围内运动。应注意的是,在第六维度上,第三极限范围大于第四极限范围,且限定范围大于第三极限范围。换句话说,若活动部m除了第六维度上的运动之外,同时在第一维度上进行运动,则活动部m在第六维度上的可动范围会随之降低。同理,当活动部m相对固定部f于第三极限范围内运动时,止动部1621、1623与活动部m以及固定部f至少一者未直接接触。
169.此外,如图2f所示,驱动机构1100中还可包括控制单元c,例如可为具有驱动功能的集成电路(driver ic)、硬盘、存储器等,用以储存第一极限范围、第二极限范围、第三极限范围、第四极限范围,以避免活动部m运动时超出前述极限范围而与其他元件发生碰撞,从而造成损坏。可通过一外部设备(未示出)来测量前述第一极限范围、第二极限范围、第三极限范围、第四极限范围,并在测量到第一极限范围、第二极限范围、第三极限范围、第四极限范围之后将其存入控制单元c。应注意的是,控制单元c可与第一位置感测组件s1(包括第一位置感测元件1082、第二位置感测元件1084、第三位置感测元件1086)以及第二感测组件s2(包括第四位置感测元件1088、第五位置感测元件1089)电性连接,以通过单个控制单元c来同时控制多个感测元件,而降低所需的控制单元数量,进而达到小型化。
170.图4a是驱动机构1100一些元件电性连接时的示意图。举例来说,图4a示出了驱动组件2100(例如前述驱动组件d)包括了第一驱动元件2101、第二驱动元件2102(例如前述驱动元件1052、驱动元件1054)、电路组件2200(例如前述电路1080)、信号调整组件2300、控制组件2400(例如前述控制单元c、第一位置感测组件s1、第二感测组件s2)。应注意的是,图4a所示出的关系所对应的结构并不限于图1a至图3f所示出的实施例,取决于设计需求。应注意的是,前述外框1010、底座1020可形成一容纳空间,以容纳活动部m,而驱动组件2100、电路组件2200、信号调整组件2300、控制组件2400可位在此容置空间中,以保护驱动组件2100、电路组件2200、信号调整组件2300、控制组件2400。
171.第一驱动元件2101、第二驱动元件2102可包括形状记忆合金,或者亦可为电磁式驱动元件、步进马达、压电元件等驱动元件。控制组件2400可通过电路组件2200以及信号调整组件2300电性连接驱动组件2100。驱动组件2100可用以驱动活动部m相对固定部f运动。在一些实施例中,控制组件2400可根据第一感测组件s1、第二感测组件s2提供的感测结果而提供第一信号2501到信号调整组件2300,信号调整组件2300可用以调整第一信号2501,以选择性地提供第二信号2502给第一驱动元件2101或提供第三信号2503给第二驱动元件2102。第一驱动元件2101可用以根据第二信号2502而对活动部m产生第一驱动力,第二驱动元件2102可用以根据第三信号2503而对活动部m产生第二驱动力。举例来说,第一驱动元件2101、第二驱动元件2102可电性连接电路组件2200的第一电路2201、第二电路2202,第一电路2201、第二电路2202可电性连接控制组件2400。
172.在一些实施例中,第一电路2201可经由驱动组件2100电性连接第二电路2202。举例来说,信号调整组件2300可包括第一电子元件2301、第二电子元件2302。第一电子元件2301、第二电子元件2302具有整流的功能,例如可包括二极管,用以限制通过的信号(例如电流)的方向。举例来说,以第一电路2201为基准时,第一电子元件2301、第二电子元件2302整流的方向可彼此相反,例如当第一信号2501为正向的电压或电流(从第一电路2201通往第二电路2202)的时候,第一电子元件2301可允许第一信号2501通过而形成一第二信号
2502,而第二电子元件2302可阻止第一信号2501通过。第二信号2502可通过第一驱动元件2101以及电性连接第一驱动元件2101的第三电路2203而抵达第二电路2202。由此,此时第一驱动元件2101经过第一电路2201、第二电路2202、第三电路2203、第一电子元件2301电性连接控制组件2400,而第二驱动元件2102未经过第一电路2201、第二电路2202电性连接控制组件2400。此时的第二信号2502为正向的电压或电流。换句话说,此时第一电路2201的电压高于第二电路2202的电压。
173.反之,当第一信号2501为负向的电压或电流(从第二电路2202通往第一电路2201)的时候,第一电子元件2301可阻止第一信号2501通过,而第二电子元件2302可允许第一信号2501通过而形成一第三信号2503。第三信号2503可通过第二驱动元件2102以及电性连接第二驱动元件2102的第四电路2204而抵达第二电路2202。由此,此时第一驱动元件2101未经过第一电路2201、第二电路2202电性连接控制组件2400,而第二驱动元件2102经过第一电路2201、第二电路2202、第四电路2204、第二电子元件2302电性连接控制组件2400。此时的第三信号2503为负向的电压或电流。换句话说,此时第一电路2201的电压低于第二电路2202的电压。
174.在一些实施例中,驱动机构1100还可包括第一夹持元件2601、第二夹持元件2602,第一夹持元件2601用以固定具有长条形结构的第一驱动元件2101的第一端,第一夹持元件2601具有板状结构,且电性连接第三电路2203。第二夹持元件2602用以固定具有长条形结构的第二驱动元件2102的第二端,第二夹持元件2602具有板状结构,且电性连接第四电路2204。
175.图4b是驱动机构1100一些元件电性连接时的示意图。与图4a的实施例不同的是,还额外包括了第三驱动元件3103、第五电路3205、第三电子元件3303。举例来说,图4b示出了驱动组件3100(例如前述驱动组件d)包括了第一驱动元件3101、第二驱动元件3102、第三驱动元件3103(例如前述驱动元件1052、驱动元件1054)、电路组件3200(例如前述电路1080)、信号调整组件3300、控制组件3400(例如前述控制单元c、第一位置感测组件s1、第二感测组件s2)。应注意的是,图4b所示出的关系所对应的结构并不限于图1a至图3f所示出的实施例,取决于设计需求。应注意的是,在一些实施例中,前述外框1010、底座1020可形成一容纳空间,以容纳活动部m,而驱动组件3100、电路组件3200、信号调整组件3300、控制组件3400可位在此容置空间中,以保护驱动组件3100、电路组件3200、信号调整组件3300、控制组件3400。
176.第一驱动元件3101、第二驱动元件3102、第三驱动元件3103可包括形状记忆合金,或者亦可为电磁式驱动元件、步进马达、压电元件等驱动元件。控制组件3400可通过电路组件3200以及信号调整组件3300电性连接驱动组件3100。驱动组件3100可用以驱动活动部m相对固定部f运动。在一些实施例中,控制组件3400可根据第一感测组件s1、第二感测组件s2提供的感测结果而提供第一信号3501到信号调整组件3300,信号调整组件3300可用以调整第一信号3501,以选择性地提供第二信号3502给第一驱动元件3101、提供第三信号3503给第二驱动元件3102、或提供第四信号3504给第三驱动元件3103。在一些实施例中,第一驱动元件3101可用以根据第二信号3502而对活动部m产生第一驱动力,第二驱动元件3102可用以根据第三信号3503而对活动部m产生第二驱动力,第三驱动元件3103可用以根据第四信号3504而对活动部m产生第三驱动力。举例来说,第一驱动元件3101、第二驱动元件3102、
第三驱动元件3103可电性连接电路组件3200的第一电路3201、第二电路3202,第一电路3201、第二电路3202可电性连接控制组件3400。
177.在一些实施例中,第一电路3201可经由驱动组件3100电性连接第二电路3202。举例来说,信号调整组件3300可包括第一电子元件3301、第二电子元件3302、第三电子元件3303。第一电子元件3301、第二电子元件3302、第三电子元件3303具有整流的功能,例如可包括二极管,用以限制通过的信号(例如电流)的方向。举例来说,以第一电路3201为基准时,第一电子元件3301、第二电子元件3302、第三电子元件3303整流的方向可彼此相同或相反,例如当第一信号3501为正向的电压或电流(从第一电路3201通往第二电路3202)的时候,第一电子元件3301可允许第一信号3501通过而形成一第二信号3502,而第二电子元件3302可阻止第一信号3501通过。第二信号3502可通过第一驱动元件3101以及电性连接第一驱动元件3101的第三电路3203而抵达第二电路3202。在这种状况下,若第一电子元件3301、第三电子元件3303整流的方向彼此相同,则第三电子元件3303可允许第一信号3501通过而形成一第四信号3504,第四信号3504可通过第三驱动元件3103以及电性连接第三驱动元件3103的第五电路3205而抵达第二电路3202。
178.由此,此时第一驱动元件3101经过第一电路3201、第二电路3202、第三电路3203、第一电子元件3301电性连接控制组件3400,第三驱动元件3103经过第一电路3201、第二电路3202、第五电路3205、第三电子元件3303电性连接控制组件3400,而第二驱动元件3102未经过第一电路3201、第二电路3202电性连接控制组件3400。此时的第二信号3502为正向的电压或电流。换句话说,此时第一电路3201的电压高于第二电路3202的电压。然而,若第一电子元件3301、第三电子元件3303整流的方向彼此相反,则第三电子元件3303可阻止第一信号3501通过,从而第一信号3501只转变为第二信号3502通过第一驱动元件3101,而未通过第二驱动元件3102、第三驱动元件3103。第二电子元件3302、第三电子元件3303整流方向相同或相反的范例亦类似,于此不再赘述。
179.在一些实施例中,驱动机构1100还可包括第一夹持元件3601、第二夹持元件3602、第三夹持元件3603,第一夹持元件3601用以固定具有长条形结构的第一驱动元件3101的第一端,第一夹持元件3601具有板状结构,且电性连接第三电路3203。第二夹持元件3602用以固定具有长条形结构的第二驱动元件3102的第二端,第二夹持元件3602具有板状结构,且电性连接第四电路3204。第三夹持元件3603用以固定具有长条形结构的第三驱动元件3103的第三端,第三夹持元件3603具有板状结构,且电性连接第五电路3205。
180.图4c是驱动机构1100一些元件电性连接时的示意图。与图4b的实施例不同的是,使用了第一切换元件4301、第二切换元件4302、第三切换元件4303来取代前述电子元件。举例来说,图4c示出了驱动组件4100(例如前述驱动组件d)包括了第一驱动元件4101、第二驱动元件4102、第三驱动元件4103(例如前述驱动元件1052、驱动元件1054)、电路组件4200(例如前述电路1080)、信号调整组件4300、控制组件4400(例如前述控制单元c、第一位置感测组件s1、第二感测组件s2)。应注意的是,图4c所示出的关系所对应的结构并不限于图1a至图3f所示出的实施例,取决于设计需求。应注意的是,前述外框1010、底座1020可形成一容纳空间,以容纳活动部m,而驱动组件4100、电路组件4200、信号调整组件4300、控制组件4400可位在此容置空间中,以保护驱动组件4100、电路组件4200、信号调整组件4300、控制组件4400。
181.第一驱动元件4101、第二驱动元件4102、第三驱动元件4103可包括形状记忆合金,或者亦可为电磁式驱动元件、步进马达、压电元件等驱动元件。控制组件4400可通过电路组件4200以及信号调整组件4300电性连接驱动组件4100。驱动组件4100可用以驱动活动部m相对固定部f运动。在一些实施例中,控制组件4400可根据第一感测组件s1、第二感测组件s2提供的感测结果而提供第一信号4501到信号调整组件4300,信号调整组件4300可用以调整第一信号4501,以选择性地提供第二信号4502给第一驱动元件4101、提供第三信号4503给第二驱动元件4102及/或提供第四信号4504给第三驱动元件4103。第一驱动元件4101可用以根据第二信号4502而对活动部m产生第一驱动力,第二驱动元件4102可用以根据第三信号4503而对活动部m产生第二驱动力,第三驱动元件4103可用以根据第四信号4504而对活动部m产生第三驱动力。举例来说,第一驱动元件4101、第二驱动元件4102、第三驱动元件4103可电性连接电路组件4200的第一电路4201、第二电路4202,第一电路4201、第二电路4202可电性连接控制组件4400。
182.在一些实施例中,第一电路4201可经由驱动组件4100电性连接第二电路4202。举例来说,信号调整组件4300可包括第一切换元件4301、第二切换元件4302、第三切换元件4303。第一切换元件4301、第二切换元件4302、第三切换元件4303可具有开关的功能,以允许或阻止电流通过。
183.在一些实施例中,第一切换元件4301可电性连接第三电路4203,用以接收控制组件4400所输出的第一控制信号,以控制第一电路4201是否经由第三电路4203电性连接第二电路4202。在一些实施例中,第一切换元件4301可包括第一控制电路4311、第一通路电路4321,第一控制电路4311可电性连接第一电路4201,用以控制第一通路电路4321是否导通以电性连接第三电路4203。
184.在一些实施例中,第二切换元件4302可电性连接第四电路4204,用以接收控制组件4400所输出的第二控制信号,以控制第一电路4201是否经由第四电路4204电性连接第二电路4202。在一些实施例中,第二切换元件4302可包括第二控制电路4312、第二通路电路4322,第二控制电路4312可电性连接第一电路4201,用以控制第二通路电路4322是否导通以电性连接第四电路4204。
185.在一些实施例中,第三切换元件4303可电性连接第五电路4205,用以接收控制组件4400所输出的第三控制信号,以控制第一电路4201是否经由第五电路4205电性连接第二电路4202。在一些实施例中,第三切换元件4303可包括第三控制电路4313、第三通路电路4323,第三控制电路4313可电性连接第一电路4201,用以控制第三通路电路4323是否导通以电性连接第五电路4205。
186.在一些实施例中,第一信号4501在第一时序包括第一信息,在第二时序包括第二信息,在第三时序包括第三信息,第一时序、第二时序、第三时序位于不同的时间点。第一切换元件4301可用以控制使第一信息输入至第一驱动元件4101,并且可用以控制使第二信息、第三信息不输入至第一驱动元件4101。第二切换元件4302可用以控制使第二信息输入至第二驱动元件4102,并且可用以控制使第一信息、第三信息不输入至第二驱动元件4102。第三切换元件4303可用以控制使第三信息输入至第三驱动元件4103,并且可用以控制使第一信息、第二信息不输入至第三驱动元件4103。由此,可分开控制第一驱动元件4101、第二驱动元件4102、第三驱动元件4103,以避免各信号之间发生干扰,从而可提升驱动的精确
度。
187.在一些实施例中,驱动机构1100还可包括第一夹持元件4601、第二夹持元件4602、第三夹持元件4603,第一夹持元件4601用以固定具有长条形结构的第一驱动元件4101的第一端,第一夹持元件4601具有板状结构,且电性连接第三电路4203。第二夹持元件4602用以固定具有长条形结构的第二驱动元件4102的第二端,第二夹持元件4602具有板状结构,且电性连接第四电路4204。第三夹持元件4603用以固定具有长条形结构的第三驱动元件4103的第三端,第三夹持元件4603具有板状结构,且电性连接第五电路4205。
188.图4d是驱动机构1100一些元件电性连接时的示意图。与图4b的实施例不同的是,使用了第一切换元件5301来取代前述电子元件。举例来说,图4d示出了驱动组件5100(例如前述驱动组件d)包括了第一驱动元件5101、第二驱动元件5102、第三驱动元件5103(例如前述驱动元件1052、驱动元件1054)、电路组件5200(例如前述电路1080)、信号调整组件5300、控制组件5400(例如前述控制单元c、第一位置感测组件s1、第二感测组件s2)。应注意的是,图4d所示出的关系所对应的结构并不限于图1a至图3f所示出的实施例,取决于设计需求。应注意的是,前述外框1010、底座1020可形成一容纳空间,以容纳活动部m,而驱动组件5100、电路组件5200、信号调整组件5300、控制组件5400可位在此容置空间中,以保护驱动组件5100、电路组件5200、信号调整组件5300、控制组件5400。
189.第一驱动元件5101、第二驱动元件5102、第三驱动元件5103可包括形状记忆合金,或者亦可为电磁式驱动元件、步进马达、压电元件等驱动元件。控制组件5400可通过电路组件5200以及信号调整组件5300电性连接驱动组件5100。驱动组件5100可用以驱动活动部m相对固定部f运动。在一些实施例中,控制组件5400可根据第一感测组件s1、第二感测组件s2提供的感测结果而提供第一信号5501到信号调整组件5300,信号调整组件5300可用以调整第一信号5501,以选择性地提供第二信号5502给第一驱动元件5101、提供第三信号5503给第二驱动元件5102、或提供第四信号5504给第三驱动元件5103。在一些实施例中,第一驱动元件5101可用以根据第二信号5502而对活动部m产生第一驱动力,第二驱动元件5102可用以根据第三信号5503而对活动部m产生第二驱动力,第三驱动元件5103可用以根据第四信号5504而对活动部m产生第三驱动力。举例来说,第一驱动元件5101、第二驱动元件5102、第三驱动元件5103可电性连接电路组件5200的第一电路5201、第二电路5202,第一电路5201、第二电路5202可电性连接控制组件5400。
190.在一些实施例中,第一电路5201可经由驱动组件5100电性连接第二电路5202。举例来说,信号调整组件5300可包括第一切换元件5301。第一切换元件5301可具有切换的功能,以控制第一信号5501所经过的电路。
191.在一些实施例中,第一切换元件5301可包括第一控制电路5311、第一通路电路5321、第二通路电路5322、第三通路电路5323,第一控制电路5311可电性连接第一电路5201,第一通路电路5321可电性连接第一驱动元件5101,第二通路电路5322可电性连接第二驱动元件5102,第三通路电路5323可电性连接第三驱动元件5103,而第一切换元件5301可根据控制组件5400所输出的第一控制信号以与第一通路电路5321、第二通路电路5322、第三通路电路5323其中一者进行导通。例如图4e、图4f、图4g分别示出第一切换元件5301与第一通路电路5321、第二通路电路5322、第三通路电路5323进行导通的状况。
192.在一些实施例中,第一信号5501在第一时序包括第一信息,在第二时序包括第二
信息,在第三时序包括第三信息,第一时序、第二时序、第三时序位于不同的时间点。第一切换元件5301可用以控制使第一信息输入至第一驱动元件4101,并且可用以控制使第二信息、第三信息不输入至第一驱动元件4101,或者可用以控制使第二信息输入至第二驱动元件4102,并且可用以控制使第一信息、第三信息不输入至第二驱动元件4102,或者可用以控制使第三信息输入至第三驱动元件4103,并且可用以控制使第一信息、第二信息不输入至第三驱动元件4103。由此,可分开控制第一驱动元件4101、第二驱动元件4102、第三驱动元件4103,以避免各信号之间发生干扰,从而可提升驱动的精确度。
193.在一些实施例中,驱动机构1100还可包括第一夹持元件5601、第二夹持元件5602、第三夹持元件5603,第一夹持元件5601用以固定具有长条形结构的第一驱动元件5101的第一端,第一夹持元件5601具有板状结构,且电性连接第三电路5203。第二夹持元件5602用以固定具有长条形结构的第二驱动元件5102的第二端,第二夹持元件5602具有板状结构,且电性连接第四电路5204。第三夹持元件5603用以固定具有长条形结构的第三驱动元件5103的第三端,第三夹持元件5603具有板状结构,且电性连接第五电路5205。
194.图5a至图5d为本公开一些实施例的信号的示意图,例如可应用为前述第一信号、第二信号、第三信号、或第四信号。如图5a所示,此信号可包括第一信息6101、第二信息6102、第三信息6103,位于不同的时序。应注意的是,第一信息6101、第三信息6103具有正向的电压或电流,而第二信息6102具有负向的电压或电流。第一信息6101、第三信息6103可为数量较多的信号,而第二信息6102可为数量较少的信号。由此,可在特定时间段内提供不同的信号给前述驱动元件,以使前述驱动元件进行运作。
195.如图5b所示,此信号可包括第一信息6201、第二信息6202、第三信息6203,位于不同的时序。应注意的是,第一信息6201、第三信息6203具有正向的电压或电流,而第二信息6202具有负向的电压或电流。第一信息6201、第三信息6203可为持续时间较长的信号,而第二信息6102可为持续时间较短的信号。由此,可在特定时间段内提供不同的信号给前述驱动元件,以使前述驱动元件进行运作。
196.如图5c所示,此信号可包括第一信息6301、第二信息6302、第三信息6303,位于不同的时序。应注意的是,第一信息6301、第三信息6303具有正向的电压或电流,而第二信息6302具有负向的电压或电流。第一信息6301、第三信息6303可为绝对数值较高的信号,而第二信息6302可为绝对数值较低的信号。由此,可在特定时间段内提供不同的信号给前述驱动元件,以使前述驱动元件进行运作。
197.如图5d所示,此信号可包括第一信息6401,而未包括负向的信号。由此,可降低切换信号方向的复杂性,以降低控制驱动元件的难度。
198.综上所述,本公开实施例提供一种驱动机构,包括固定部、活动部、驱动组件、电路组件以及信号调整组件。活动部可相对固定部运动。驱动组件用以驱动活动部相对固定部运动,驱动组件接收由控制组件所输出的第一信号。驱动组件经由电路组件电性连接控制组件。信号调整组件电性连接驱动组件。信号调整组件用以调整第一信号。由此,可分开控制各驱动组件,以避免信号之间发生干扰,从而提升控制的精确度。
199.本公开所公开各元件的特殊相对位置、大小关系不但可使驱动机构达到特定方向的薄型化、整体的小型化,另外经由搭配不同的光学模块使系统更进一步提升光学品质(例如拍摄品质或是深度感测精度等),更进一步地利用各光学模块达到多重防震系统以大幅
提升防手震的效果。
200.虽然本公开的实施例及其优点已公开如上,但应该了解的是,本领域技术人员在不脱离本公开的精神和范围内,当可作更动、替代与润饰。此外,本公开的保护范围并未局限于说明书内所述特定实施例中的工艺、机器、制造、物质组成、装置、方法及步骤,任何所属技术领域中技术人员可从本公开的公开内容中理解现行或未来所发展出的工艺、机器、制造、物质组成、装置、方法及步骤,只要可以在此处所述实施例中实施大抵相同功能或获得大抵相同结果皆可根据本公开使用。因此,本公开的保护范围包括上述工艺、机器、制造、物质组成、装置、方法及步骤。另外,每一权利要求构成个别的实施例,且本公开的保护范围也包括各个权利要求及实施例的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1