全自动机器人LED光学膜片精确贴合方法与流程
全自动机器人led光学膜片精确贴合方法
技术领域
1.本发明涉及液晶屏自动化生产技术领域,具体涉及全自动机器人led 光学膜片精确贴合方法。
背景技术:
2.随着彩电业朝着高端大屏化发展的趋势,彩电新技术概念不断涌现,彩电的显示技术之争也是非常激烈,智能化生产已然成为彩电业发展的主题。智能工厂因其智能化、自动化受到了高度的重视和大力扶持。电视模组作为智能电视生产的关键,在其中起着非常重要的作用。其中反射片作为智能电视的显示部分,是智能电视的关键部分。
3.反射片在液晶电视机里属于背光系统,作用是将背板灯发出的光反射到整个屏幕上。反射片贴合的好坏直接影响了画面的显示效果,由此可见,对反射片的贴合技术水平要求较高。
4.在现有技术中通常采用的是由人工手动进行反射片贴合作业,但人工手动贴合反射片与显示器背板存在定位不精确,贴合时受力不均匀等问题。
技术实现要素:
5.为了解决上述问题,本发明提供了一种利用机器手自动抓取光学膜片并精确对位贴合,节省人力成本的同时,提高产品稳定性和生产效率的全自动机器人led光学膜片精确贴合方法。
6.为了到达上述目的,本发明设计的全自动机器人led光学膜片精确贴合方法,所述的贴合方法包括:提供一光学膜片;
7.提供一显示器背板;
8.通过抓取机械手抓取光学膜片;
9.通过显示器背板夹抱装置固定显示器背板加工位置,并由抓取机器手将光学膜片移动至显示器背板的正上方;
10.通过显示器背板与光学膜片贴合路径之间的对位装置,分别获取显示器背板顶角的位置信息,以使光学膜片与显示器背板对位;
11.再通过抓取机器手控制光学膜片沿竖直方向移动,以使光学膜片与显示器背板精确贴合。这种方法的作用在于通过抓取机器手精确贴合显示器背板与光学膜片,节省人力成本的同时,通过抓取机械手平稳的移动,使得光学膜片平稳的下移,保证显示器背板与光学膜片贴合时受力均匀,同时提高贴合反射片定位精确度。
12.为了进一步保证光学膜片与显示器背板之间的贴合精度,同时提升该方法的适用范围,在通过显示器背板夹抱装置固定显示器背板加工位置之前还包括步骤:
13.通过显示器背板夹抱装置下方设置的沿显示器背板宽度方向排列的顶升板,将显示器背板向上顶升,并通过顶升板前端设置的支撑滚珠支撑显示器背板,保证显示器背板的可平移性;
14.进一步的,显示器背板夹抱装置中两相对设置的长度抱夹单元以及两相对设置的宽度抱夹单元,由各自的驱动单元驱动对显示器背板进行多方位的抱夹固定。这种方法的作用在于通过顶升板前端设置的支撑滚珠,对显示器背板形成支撑的同时,保证了显示器背板的可平移性,再通过两相对设置的长度抱夹单元与两相对设置的宽度抱夹单元抵住光学膜片的四边,并定位显示器背板的摆放位置,使得显示器背板能够在水平面上保持静止,从而提高了光学膜片与显示器背板贴合时的精准度,且该方法可以设配不同尺寸的光学膜片与显示器背板的贴合,增加了其通用性。
15.为了保证光学膜片与显示器背板的顺畅贴合,通过对位装置获取光学膜片与显示器背板顶角的位置信息之前,通过对位装置中设置的多组ccd 图像装置相互连接形成拍摄空间覆盖显示器背板或光学膜片的表面,且上述形成的拍摄空间中设有用于供带有光学膜片的抓取机器手通过的贴合通道。这种方法的作用在于通过将多组ccd图像装置相互连接组成拍摄空间中的贴合通道,从而避免ccd图像装置干涉抓取机器手控制光学膜片与显示器背板贴合的过程。
16.为了同时获取光学膜片与显示器背板的位置数据,将ccd图像装置分为两个镜头朝向不同的ccd摄像机,分别对光学膜片与显示器背板的顶角位置进行拍摄。这种方法的作用在于通过ccd图像装置同时获取光学膜片与显示器背板顶角图像,从而进过计算获取的顶角位置,最终得到光学膜片与显示器背板的定位数据,从而来进一步调整光学膜片所在的位置,以确保光学膜片与显示器背板精确贴合。
17.为了进一步的获取精确的显示器背板与液晶面板的边角位置信息,所述的ccd图像装置数量为3个,3个ccd图像装置之间的连线形成一直角三角形,并通过3个ccd图像装置分别对应拍摄光学膜片与显示器背板的3个顶角位置。这种方法的作用在于通过3个ccd图像装置分别从三处不同的位置进行ccd定位拍摄,特别是矩形的三个顶点位置进行拍摄,保证准确获取显示器背板以及液晶面板的位置定位。
18.为了能够确保光学膜片与显示器背板的产品质量,同时进一步的提升该方法适用范围,在通过对位装置获取光学膜片与显示器背板顶角的位置信息之前还包括步骤:
19.通过对位装置中设置的水平滑动单元驱动各自的ccd图像装置,分别沿显示器背板或光学膜片的长度方向以及宽度方向来回移动。这种方法的作用在于通过分别沿显示背板或光学膜片长度方向及宽度方向移动的ccd 图像装置,根据拍摄得到的图像自动寻找顶角位置,从而使得该方法可以设配不同尺寸的光学膜片与显示器背板的贴合,增加了其生产通用性,另一方面,还能通过可沿水平方向自由移动的ccd图像装置,检测所贴合光学膜片与显示器背板上的质量缺陷。
20.为了更进一步的提升显示器背板与液晶面板贴合精度,通过抓取机器手控制光学膜片沿竖直方向移动,直至光学膜片与显示器背板精确贴合的过程中还包括步骤:
21.通过设置在光学膜片与显示器背板贴合路线上的ccd图像装置,实时拍摄上述光学膜片与显示器背板中的3个顶角位置,并根据拍摄得到的数据信息实时通过抓取机械手微调光学膜片的位置。这种方法的作用在于通过可在光学膜片与显示器背板贴合过程中,实时跟踪拍摄的ccd图像装置,从而在抓取机器手带动光学膜片朝向显示器背板移动时,检测光学膜片与显示器背板的位置是否精确,并实时微调,以避免五轴机械手由于控制问题所带来的微量偏差。
22.为了保证ccd图像装置所拍摄的图像的清晰度,所述的ccd图像装置安装在高度距离显示器背板500~550mm的位置上。这种方法的作用在于通过将ccd定位组件安装在500~550mm的位置上,确保ccd定位组件所拍摄的光学膜片显示器背板各个顶点位置图像的清晰度,从而进一步提高贴合精确度。
23.为了保证抓取机械手所抓取膜片数量,在通过抓取机械手抓取光学膜片之时还包括步骤:
24.通过摆放光学膜片的工位上设置的分离装置,分离相互粘连的光学膜片。这种方法的作用在于通过分离装置,防止抓取机械手抓取多片相互粘连的光学膜片,导致出现显示器背板内放置膜片数量不对的情况,也避免了人工进行膜片分离时,膜片上容易产生静电吸附灰尘的情况出现,导致影响产品质量的问题。
25.为了进一步的保证抓取机械手所抓取膜片数量,所述的分离装置为可产生大量的带有正负电荷气团的离子发生器。这种方法的作用在于通过一可产生大量的带有正负电荷气团的离子发生器,在抓取之前去除最上层光学膜片上表面的静电,使得第一张光学膜片和其下部的第二张光学膜片易于分离,在抓取机器手抓取光学膜片时,去除被抓去光学膜片下表面静电,使得光学膜片表面所吸附的灰尘减少,或将粘连的光学膜片吹落。
26.本发明所设计的全自动机器人led光学膜片精确贴合方法,在抓取机械手抓取光学膜片之前,需先通过摆放光学膜片的工位上设置的离子发生器,去除光学膜片表面的静电,保证抓取机械手所抓取膜片数量,再通过顶升板带动显示器背板向上抬升后,经由显示器背板夹抱装置中两相对设置的长度抱夹单元与两相对设置的宽度抱夹单元抵住光学膜片的四条边,定位显示器背板的摆放位置,使得显示器背板能够在水平面上保持不动。
27.通过抓取机器手将光学膜片移动至显示器背板的正上方,再通过ccd 图像装置同时获取光学膜片与显示器背板顶角的位置定位后,根据光学膜片与显示器背板的定位数据,调整光学膜片所在的位置,最后通过抓取机器手控制光学膜片沿竖直方向移动,以使光学膜片与显示器背板精确贴合。
28.综上所述本发明具有利用机器人取代传统人工贴合光学膜片与显示器背板的生产方式,减少了光学膜片分离过程中产生静电吸附灰尘影响产品的质量,保证抓取到的膜片数量正确,节省人力成本的同时,确保光学膜片与显示器背板精确贴合的优点。
附图说明
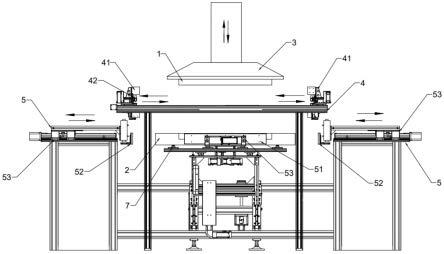
29.图1是光学膜片与显示器背板贴合的结构示意图。
30.图2是抓取机器手自动抓取光学膜片的结构示意图,
31.图3是对位装置的轴测图。
32.图4是图3的a区域局部放大图。
33.图5是图3的b区域局部放大图。
34.图6是显示器背板装置的俯视图。
35.图7是长度抱夹单元的轴测图。
36.图8是图7的c区域局部放大图。
具体实施方式
37.为更进一步阐述本发明为实现预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明的具体实施方式、结构、特征及其功效,详细说明如后。
38.实施例1。
39.如图1—图8所示,本实施例描述的全自动机器人led光学膜片精确贴合方法,
40.所述的贴合方法包括:提供一光学膜片1;
41.提供一显示器背板2;
42.通过抓取机械手3抓取光学膜片1;
43.通过显示器背板夹抱装置5下方设置的沿显示器背板2宽度方向排列的顶升板7,将显示器背板2向上顶升,并通过顶升板7前端设置的支撑滚珠71支撑显示器背板2,保证显示器背板的可平移性;
44.将显示器背板夹抱装置5中两相对设置的长度抱夹单元51以及两相对设置的宽度抱夹单元52,由各自的驱动单元53驱动对显示器背板2进行多方位的抱夹固定,以固定显示器背板2加工位置,再由抓取机器手3将光学膜片1移动至显示器背板2的正上方;
45.将显示器背板2与光学膜片1贴合路径之间的对位装置4分为3组ccd 图像装置41,3组ccd图像装置41相互连接形成拍摄空间覆盖显示器背板2或光学膜片1的表面,从而通过ccd图像装置41获取显示器背板2 或光学膜片1各个顶角的位置信息,以使光学膜片1与显示器背板2对位;
46.再通过上述形成的拍摄空间中设有用于供带有光学膜片1的抓取机器手3通过的贴合通道,以使抓取机器手3控制光学膜片1与显示器背板2 精确贴合。
47.实施例2。
48.如图1所示,本实施例描述的全自动机器人led光学膜片精确贴合方法,所述的ccd图像装置41安装在高度距离显示器背板2500mm的位置上。
49.实施例3。
50.如图1、图3、图4和图5所示,本实施例描述的全自动机器人led 光学膜片精确贴合方法,将所述ccd图像装置41分为两个镜头朝向不同的ccd摄像机42,从而通过两个镜头朝向不同的ccd摄像机42分别对光学膜片1与显示器背板2的顶角位置进行拍摄。
51.所述的ccd图像装置41数量为3个,3个ccd图像装置41之间的连线形成一直角三角形,并通过3个ccd图像装置41分别对应拍摄光学膜片1与显示器背板2的3个顶角位置。
52.在通过对位装置4获取光学膜片1与显示器背板2顶角的位置信息之前还包括步骤:
53.通过对位装置4中设置的水平滑动单元43驱动各自的ccd图像装置 41,分别沿显示器背板2或光学膜片1的长度方向以及宽度方向来回移动。
54.实施例4。
55.如图1、图3、图4和图5所示,本实施例描述的全自动机器人led 光学膜片精确贴合方法,所述抓取机械手3为五轴机械手。
56.通过抓取机器手3控制光学膜片1沿竖直方向移动,直至光学膜片1 与显示器背板2精确贴合的过程中还包括步骤:
57.通过设置在光学膜片1与显示器背板2贴合路线上的ccd图像装置,实时拍摄上述
光学膜片1与显示器背板2中的3个顶角位置;
58.同时根据拍摄得到的数据信息实时通过抓取机械手3微调光学膜片1 的位置,以避免五轴机械手由于控制问题所带来的微量偏差。
59.实施例5。
60.如图2所示,本实施例描述的全自动机器人led光学膜片精确贴合方法,在通过抓取机械手3抓取光学膜片1之时还包括步骤:
61.通过摆放光学膜片1的工位上设置的分离装置6,所述的分离装置6 为可产生大量的带有正负电荷气团的离子发生器,在抓取之前去除摆放光学膜片1的工位中最上层光学膜片1上表面的静电,使得第一张光学膜片 1和其下部的第二张光学膜片1易于分离;
62.在抓取机器手3抓取光学膜片1时,去除被抓去光学膜片1下表面静电,使得光学膜片1表面所吸附的灰尘减少,或将粘连的光学膜片1吹落。
63.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明。任何本领域技术人员,在不脱离本发明技术方案范围内,应当可利用上述揭示的技术内容经些许变更或修饰作出属于等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1