一种智能自动数控弯管机的制作方法
1.本发明属于弯管机领域,具体的说是一种智能自动数控弯管机。
背景技术:
2.弯管机是航空航天、汽车、机车、摩托车、船舶、石化、电力、天然气、核工业、锅炉、车辆、健身器材、空调制冷、体育用品等管件的弯曲加工设备。
3.传统的弯管机多为固定模滚轮组弯管,该方法在弯管时只能弯管圆形截面的管道,并且,由于是采用机械扭力强行扭曲,滚轮外表面会产生极大的摩擦损耗,久而久之便会产生间隙,管道在弯曲时会因为受力不均匀而跑偏,导致管道弯曲不均匀。
技术实现要素:
4.(一)解决的技术问题针对现有技术的不足,本发明提供了一种,解决了传统的弯管机只能弯曲圆形截面的管道,且在弯曲时,管道容易弯曲不均匀的问题。
5.(二)技术方案本发明解决其技术问题所采用的技术方案是:本发明所述的一种智能自动数控弯管机,包括底板;所述底板的上表面固定连接有驱动机构,所述驱动机构的左侧设置有支撑板,所述支撑板的下表面与底板的上表面固定连接,所述支撑板的上表面固定连接有装夹机构,所述装夹机构的左侧设置有数控弯管机构,所述数控弯管机构位于底板的上表面;所述驱动机构包括调节杆,所述调节杆的两端设置有夹块,所述夹块的下表面与底板的上表面固定连接,所述夹块的上表面转动连接有转环,所述转环的内表面活动连接有驱动轴,所述驱动轴的外表面固定连接有导轮,所述导轮的底部设置有弹片,所述弹片位于转环的壁中,所述弹片的两端与驱动轴的外表面转动连接。
6.所述装夹机构包括注油管,所述注油管的底端固定连接有密封罩,所述密封罩的内表面固定连接有调节机构,所述调节机构的内部活动连接有夹持机构,所述密封罩的外表面与支撑板的上表面固定连接。
7.所述调节机构包括固定环,所述固定环的外表面与密封罩的内表面固定连接,所述固定环的内表面固定连接有套筒,所述套筒的内表面滑动连接有弯杆,所述弯杆的顶端固定连接有滑板,所述滑板的下表面固定连接有伸缩杆,所述伸缩杆的底端贯穿固定环的内表面,并延伸至固定环的外部,所述伸缩杆的外表面设置有压缩弹簧,所述压缩弹簧的顶端与滑板的下表面固定连接,所述压缩弹簧的底端与固定环的内表面固定连接。
8.所述夹持机构包括伸缩板,所述伸缩板的下表面与滑板的上表面滑动连接,所述伸缩板的上表面固定连接有气囊,所述气囊的两端设置有推杆,所述推杆的外表面与气囊的内表面滑动连接,所述推杆的顶端活动连接有夹板,所述夹板的上表面固定连接有防滑条,所述夹板的下表面与气囊的上表面固定连接。
9.所述数控弯管机构包括x轴,所述x轴的外表面与底板的内表面转动连接,所述x轴
的外表面螺纹连接有y轴,所述y轴的外表面滑动连接有滑块,所述滑块的内表面滑动连接有z轴,所述z轴的顶端固定连接有转板,所述转板位于滑块的顶部,所述滑块左侧的外表面固定连接有推拉杆。
10.本发明的有益效果如下:1.本发明通过设置驱动机构,当设备使用时,将管道从驱动机构的右侧向左侧塞入,三个导轮在负责推进管道前进的同时,也起到一定的辅助夹紧效果,当管道截面为圆形时,导轮三点定位,圆形管道被推入设备内部,当管道截面为非圆形时,松开调节杆,夹块与转环分离,转动转环,使其偏转一定的夹角,直至导轮的外表面与异型管道平整的外表面接触挤压,同样利用三点定位,保持管道输送的稳定性,待管道固定完毕后,外部传动装置与任意三根驱动轴中的一根固定连接即可,当其中一根损坏时,转动转环,设备仍可使用,弹片在改变转环内径范围的同时,也能防止压力过大导致设备和管道损坏,解决了传统弯管机在推进管道时,推进模块内径固定,设备适应性较差的问题。
11.2.本发明通过设置装夹机构,当管道从驱动机构进入装夹机构的内部时,注油管向密封罩的内部注入或吸出液压油,密封罩与调节机构之间的空隙中的液压也随之改变,当管道穿过固定环后,注油管给油,伸缩杆在压强作用下伸出,弯杆从套筒伸出,滑板向上挤压伸缩板,伸缩板收缩,固定环的内径减小,在此过程中,防滑条的上表面与管道的外表面接触挤压,随着压力的增大,夹板向下挤压气囊,推杆从气囊的内部伸出,推杆的顶端向上挤压夹板的下表面,夹板与管道接触面积和压力增大,稳定性增大,装夹机构在满足装夹效果的同时,也能适应不同尺寸和形状的管道的夹持,解决了传统弯管机装夹模块结构固定,灵活性和通过性较差,且管道容易跑偏的问题。
12.3.本发明通过设置数控弯管机构,当装夹机构将管道定心固定后,管道待弯曲部分伸入数控弯管机构的内部,数控单元通过内部坐标系,分别调节x轴、y轴和z轴, x轴转动,y轴沿x轴的外表面上下滑动,推拉杆运动,滑块沿着y轴的外表面左右滑动,直至滑块运动至指定位置后停止,z轴运动,转板的高度和角度改变,转板夹住管道的外表面,转板在高度方向上运动的同时转动一定的角度,使得管道弯曲指定弧度,解决了传统弯管机手动弯管,管道容易弯曲不均匀的问题。
附图说明
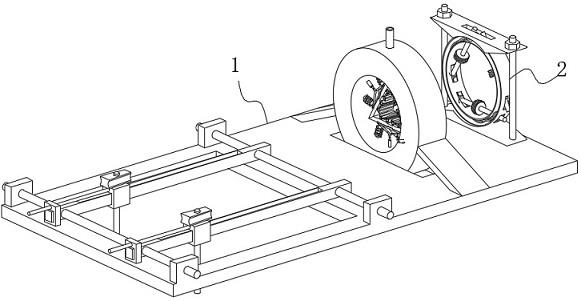
13.图1是本发明的主视图;图2是本发明的剖视图;图3是本发明驱动机构的结构示意图;图4是本发明装夹机构的结构示意图;图5是本发明调节机构的结构示意图;图6是本发明夹持机构的结构示意图;图7是本发明数控弯管机构的结构示意图。
14.图中:底板1,驱动机构2,支撑板3,装夹机构4,数控弯管机构5,调节杆10,夹块11,转环12,驱动轴13,弹片14,导轮15,注油管20,密封罩21,调节机构22,夹持机构23,固定环30,套筒31,弯杆32,滑板33,伸缩杆34,压缩弹簧35,伸缩板40,气囊41,推杆42,夹板43,防滑条44,x轴50,y轴51,滑块52,z轴53,转板54,推拉杆55。
具体实施方式
15.使用图1
‑
图7对本发明一实施方式的一种智能自动数控弯管机进行如下说明。
16.如图1
‑
图7所示,本发明所述的一种智能自动数控弯管机,包括底板1;底板1的上表面固定连接有驱动机构2,驱动机构2的左侧设置有支撑板3,支撑板3的下表面与底板1的上表面固定连接,支撑板3的上表面固定连接有装夹机构4,装夹机构4的左侧设置有数控弯管机构5,数控弯管机构5位于底板1的上表面;驱动机构2包括调节杆10,调节杆10的两端设置有夹块11,夹块11的下表面与底板1的上表面固定连接,夹块11的上表面转动连接有转环12,转环12的内表面活动连接有驱动轴13,驱动轴13的外表面固定连接有导轮15,导轮15的底部设置有弹片14,弹片14位于转环12的壁中,弹片14的两端与驱动轴13的外表面转动连接,通过设置驱动机构2,当设备使用时,将管道从驱动机构2的右侧向左侧塞入,三个导轮15在负责推进管道前进的同时,也起到一定的辅助夹紧效果,当管道截面为圆形时,导轮15三点定位,圆形管道被推入设备内部,当管道截面为非圆形时,松开调节杆10,夹块11与转环12分离,转动转环12,使其偏转一定的夹角,直至导轮15的外表面与异型管道平整的外表面接触挤压,同样利用三点定位,保持管道输送的稳定性,待管道固定完毕后,外部传动装置与任意三根驱动轴13中的一根固定连接即可,当其中一根损坏时,转动转环12,设备仍可使用,弹片14在改变转环12内径范围的同时,也能防止压力过大导致设备和管道损坏,解决了传统弯管机在推进管道时,推进模块内径固定,设备适应性较差的问题。
17.装夹机构4包括注油管20,注油管20的底端固定连接有密封罩21,密封罩21的内表面固定连接有调节机构22,调节机构22的内部活动连接有夹持机构23,密封罩21的外表面与支撑板3的上表面固定连接,通过设置装夹机构4,当管道从驱动机构2进入装夹机构4的内部时,注油管20向密封罩21的内部注入或吸出液压油,密封罩21与调节机构22之间的空隙中的液压也随之改变,当管道穿过固定环30后,注油管20给油,伸缩杆34在压强作用下伸出,弯杆32从套筒31伸出,滑板33向上挤压伸缩板40,伸缩板40收缩,固定环30的内径减小,在此过程中,防滑条44的上表面与管道的外表面接触挤压,随着压力的增大,夹板43向下挤压气囊41,推杆42从气囊41的内部伸出,推杆42的顶端向上挤压夹板43的下表面,夹板43与管道接触面积和压力增大,稳定性增大,装夹机构在满足装夹效果的同时,也能适应不同尺寸和形状的管道的夹持,解决了传统弯管机装夹模块结构固定,灵活性和通过性较差,且管道容易跑偏的问题。
18.调节机构22包括固定环30,固定环30的外表面与密封罩21的内表面固定连接,固定环30的内表面固定连接有套筒31,套筒31的内表面滑动连接有弯杆32,弯杆32的顶端固定连接有滑板33,滑板33的下表面固定连接有伸缩杆34,伸缩杆34的底端贯穿固定环30的内表面,并延伸至固定环30的外部,伸缩杆34的外表面设置有压缩弹簧35,压缩弹簧35的顶端与滑板33的下表面固定连接,压缩弹簧35的底端与固定环30的内表面固定连接。
19.夹持机构23包括伸缩板40,伸缩板40的下表面与滑板33的上表面滑动连接,伸缩板40的上表面固定连接有气囊41,气囊41的两端设置有推杆42,推杆42的外表面与气囊41的内表面滑动连接,推杆42的顶端活动连接有夹板43,夹板43的上表面固定连接有防滑条44,夹板43的下表面与气囊41的上表面固定连接。
20.数控弯管机构5包括x轴50,x轴50的外表面与底板1的内表面转动连接,x轴50的外
表面螺纹连接有y轴51,y轴51的外表面滑动连接有滑块52,滑块52的内表面滑动连接有z轴53,z轴53的顶端固定连接有转板54,转板54位于滑块52的顶部,滑块52左侧的外表面固定连接有推拉杆55,通过设置数控弯管机构5,当装夹机构4将管道定心固定后,管道待弯曲部分伸入数控弯管机构5的内部,数控单元通过内部坐标系,分别调节x轴50、y轴51和z轴53, x轴50转动,y轴沿x轴的外表面上下滑动,推拉杆55运动,滑块52沿着y轴51的外表面左右滑动,直至滑块52运动至指定位置后停止,z轴运动,转板54的高度和角度改变,转板54夹住管道的外表面,转板54在高度方向上运动的同时转动一定的角度,使得管道弯曲指定弧度,解决了传统弯管机手动弯管,管道容易弯曲不均匀的问题。
21.具体工作流程如下:工作时,将管道从驱动机构2的右侧向左侧塞入,三个导轮15在负责推进管道前进的同时,也起到一定的辅助夹紧效果,当管道截面为圆形时,导轮15三点定位,圆形管道被推入设备内部,当管道截面为非圆形时,松开调节杆10,夹块11与转环12分离,转动转环12,使其偏转一定的夹角,直至导轮15的外表面与异型管道平整的外表面接触挤压,同样利用三点定位,保持管道输送的稳定性,待管道固定完毕后,外部传动装置与任意三根驱动轴13中的一根固定连接即可,当其中一根损坏时,转动转环12,设备仍可使用,弹片14在改变转环12内径范围的同时,也能防止压力过大导致设备和管道损坏。
22.当管道从驱动机构2进入装夹机构4的内部时,注油管20向密封罩21的内部注入或吸出液压油,密封罩21与调节机构22之间的空隙中的液压也随之改变,当管道穿过固定环30后,注油管20给油,伸缩杆34在压强作用下伸出,弯杆32从套筒31伸出,滑板33向上挤压伸缩板40,伸缩板40收缩,固定环30的内径减小,在此过程中,防滑条44的上表面与管道的外表面接触挤压,随着压力的增大,夹板43向下挤压气囊41,推杆42从气囊41的内部伸出,推杆42的顶端向上挤压夹板43的下表面,夹板43与管道接触面积和压力增大,稳定性增大,装夹机构在满足装夹效果的同时,也能适应不同尺寸和形状的管道的夹持。
23.当装夹机构4将管道定心固定后,管道待弯曲部分伸入数控弯管机构5的内部,数控单元通过内部坐标系,分别调节x轴50、y轴51和z轴53, x轴50转动,y轴沿x轴的外表面上下滑动,推拉杆55运动,滑块52沿着y轴51的外表面左右滑动,直至滑块52运动至指定位置后停止,z轴运动,转板54的高度和角度改变,转板54夹住管道的外表面,转板54在高度方向上运动的同时转动一定的角度,使得管道弯曲指定弧度。
24.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1