一种叉车门架焊接设备的制作方法
1.本发明涉及焊接设备的技术领域,尤其是涉及一种叉车门架焊接设备。
背景技术:
2.叉车门架是叉车取物装置的主要承重结构,也是提升货物的机构,又称为门架,由内门架、外门架、货叉架、货叉、链轮、链条、起升油缸和倾斜油缸等组成。
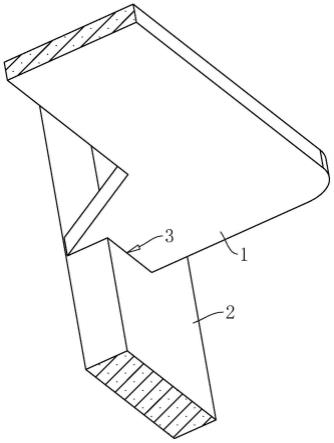
3.参照图1,一种叉车门架包括门架一1和门架二2,门架一1与门架二2之间形成有拼缝3,所述拼缝3呈“l”形状,所述拼缝3处形成有焊面。一般地,门架一1与门架二2的焊接方式为,将门架一1与门架二2拼装后,操作人员手持焊接设备进行烧焊作业。
4.针对上述相关技术,发明人认为:操作人员手持焊接设备连续烧焊,工作强度大且效率低。
技术实现要素:
5.为了降低操作人员的工作强度和改善烧焊效率,本技术提供一种叉车门架焊接设备。
6.一种叉车门架焊接设备,用于焊接叉车门架,叉车门架包括门架一和门架二,所述门架一和门架二之间形成有拼缝,包括放置叉车门架的焊接平台,对拼缝处进行烧焊的焊接机构及设于焊接平台上的传送机构,所述传送机构用于拼装门架一和门架二;所述焊接平台间隔开设有两组容纳槽,所述拼缝位于两组容纳槽之间;所述焊接机构包括两组焊架一和一组动力组件,所述焊架一设于容纳槽内,且始终相对完成拼装后的门架一水平,所述动力组件分别斜向往复驱动焊架一碰触或远离拼缝。
7.通过采用上述技术方案,利用传送机构将门架一和门架二进行拼装定位,拼装定位完成后开始烧焊作业。烧焊时,在动力组件作用下,驱动焊架一碰触拼缝处并对拼缝处进行烧焊处理,完成烧焊后,驱动焊架一回退至原始位置。先通过传送机构完成叉车门架拼装,后通过焊接机构对拼缝两侧同时进行烧焊作业,然后利用吊装器具将叉车门架吊运至下一道工序,并最终使得本方案具有降低操作人员工作强度并改善烧焊效率的优点。
8.可选的,所述焊架一包括安装板,所述安装板朝向拼缝一侧间隔设有定位焊头,相邻所述定位焊头之间设有若干连续焊头,所述定位焊头先烧焊拼缝处且连续焊头后烧焊。
9.通过采用上述技术方案,先利用间隔设置的定位焊头对拼缝处进行初步焊接定位,具体方式为同时对若干定位焊头进行同时通电且同时断电,后依次对若干连续焊头通断电,对拼缝处进行连续烧焊并形成完整的焊面,进而改善焊面成型度、焊面的连续性和整体。
10.可选的,所述焊接机构还包括焊架二,所述焊架二与焊架一远离动力组件的一端转动相连,所述焊架二设有朝向拼缝的补充焊头;所述焊接平台还设有弧形挡板,所述焊架二远离焊架一的一端与弧形挡板适应抵
接,所述焊架二另一侧推动补充焊头抵紧拼缝处。
11.通过采用上述技术方案,因暴露的拼缝主要包括两个平行缝和一个垂直缝,两个平行缝和一个垂直缝呈“门字型”,两个平行缝由焊架一进行烧焊,而垂直缝则由补充焊头进行焊接,即焊架二随着焊架一平行靠近拼缝时,焊架二远离焊架一的端部与弧形挡板相作用,使得焊架二相对焊架一进行转动且推动补充焊头,直至补充焊头碰焊垂直缝,最终使得拼缝处焊接实现连续且完整,进一步改善焊接质量。
12.可选的,所述动力组件包括步进电机、分别带动焊架一的传动件及分别驱动传动件的驱动件,所述步进电机与驱动件安装连接。
13.通过采用上述技术方案,启动步进电机,步进电机通过驱动件分别驱动带动件,带动件分别带动相应的焊架一进行焊接,方便烧焊且有助于改善烧焊效率。
14.可选的,所述驱动件包括蜗杆、两组蜗轮及两组竖向轴,所述步进电机与蜗杆固定,所述蜗杆依次与蜗轮啮合,所述竖向轴一端依次与蜗杆固定,所述竖向轴另一端依次穿至焊接平台的上方并带动传动件。
15.通过采用上述技术方案,步进电机首先驱动蜗杆,蜗杆同时带动两组蜗轮转动,蜗轮转动进而带动竖向轴转动,进而同时带动两组传动件分别驱动相应的焊架一进行碰触或远离拼缝。
16.可选的,所述传动件包括齿轮和与齿轮啮合的齿条,所述齿轮与竖向轴远离蜗轮的一端固定,所述焊架一与齿条固定。
17.通过采用上述技术方案,竖向轴转动时,齿轮带动齿条,进而齿条带动焊架一往复运动,方便控制烧焊作业,同时齿条因本身长度作用,对焊架一也具有导向作用。
18.可选的,所述传送机构包括第一传送带、驱动第一传送带的第一电机、第二传送带及驱动第二传送带的第二电机,所述第一传送带用于运输门架一,所述第二传送带运输门架二。
19.通过采用上述技术方案,启动第一电机,第一电机驱动第一传送带,第一传送带带动门架一或门架二,启动第二电机,第二电机驱动第二传送带,第二传送带带动门架一或门架二,进而实现门架一和门架二的拼装作业,为后续烧焊作业提供方便。
20.可选的,所述焊接平台开设有横向通道,所述门架一与横向通道侧壁相抵,所述第一传送带位于横向通道的下方;所述焊接平台还开设有纵向通道,所述门架二与纵向通道侧壁相抵,所述横向通道与纵向通道相连通,所述第二传送带位于纵向通道的下方。
21.通过采用上述技术方案,横向通道对位于第一传送带上方运动的门架一具有导向作用,进而方便门架一运输时的稳定性,纵向通道对位于第二传送带上方运动的门架二具有导向作用,进而方便门架二运输时的稳定性,横向通道与纵向通道相连通进而方便门架一与门架二进行拼接组装,方便烧焊。
22.综上所述,本技术包括以下至少一种有益技术效果:1.先通过传送机构完成叉车门架拼装,后通过焊接机构对拼缝两侧同时进行烧焊作业,然后利用吊装器具将叉车门架吊运至下一道工序,并最终使得本方案具有降低操作人员工作强度并改善烧焊效率的优点;2.具体方式为同时对若干定位焊头进行同时通电且同时断电,后依次对若干连续
焊头通断电,对拼缝处进行连续烧焊并形成完整的焊面,进而改善焊面成型度、焊面的连续性和整体;3.焊架二随着焊架一平行靠近拼缝时,焊架二远离焊架一的端部与弧形挡板相作用,使得焊架二相对焊架一进行转动且推动补充焊头,直至补充焊头碰焊垂直缝,最终使得拼缝处焊接实现连续且完整,进一步改善焊接质量;4.步进电机首先驱动蜗杆,蜗杆同时带动两组蜗轮转动,蜗轮转动进而带动竖向轴转动,进而同时带动两组传动件分别驱动相应的焊架一进行碰触或远离拼缝。
附图说明
23.图1是本技术背景技术中叉车门架的结构示意图;图2是本技术实施例叉车门架拼装烧焊时整体结构示意图;图3是图2中a处的放大结构示意图;图4是本技术实施例展示动力组件及部分传送机构的结构示意图;图5是图4中b处的放大结构示意图。
24.附图标记说明:1、门架一;2、门架二;3、拼缝;4、焊接平台;41、容纳槽;42、弧形挡板;43、安装槽;44、斜向滑槽;45、安装腔室;46、横向通道;47、纵向通道;48、限位板;5、传送机构;51、第一传送带;52、第一电机;53、第二传送带;54、第二电机;55、限位板;6、焊接机构;61、焊架一;611、安装板;612、定位焊头;613、连续焊头;62、焊架二;621、补充焊头;63、动力组件;631、步进电机;632、传动件;6321、齿轮;6322、齿条;6323、滑块;633、驱动件;6331、蜗杆;6332、蜗轮;6333、竖向轴。
具体实施方式
25.以下结合附图1-5对本技术进一步详细说明。
26.本技术实施例公开一种叉车门架焊接设备,用于焊接如图1所示的一种叉车门架,叉车门架包括门架一1和门架二2,门架一1开设有缺口,缺口呈l形状,缺口内壁与门架二2周壁抵接连接,抵接连接的门架一1与门架二2之间形成有拼缝3,暴露的拼缝3主要包括两个平行缝和垂直缝,两个平行缝和一个垂直缝呈“门字型”。。门架一1可以为叉车门架中的重要承重结构,如货叉架的承重梁;门架二2可以为叉车门架中的重要承重结构,如滑架,故图1所展示的是滑架与货叉架之间的关系图。
27.参照图1、图2,本技术实施公开的一种叉车门架焊接设备,其主要任务是对暴露的拼缝3进行烧焊作业。一种叉车门架焊接设备,其包括焊接平台4、传送机构5及焊接机构6,传送机构5和焊接机构6均设于焊接平台4上。门架二2和门架一1先后通过传送机构5在焊接平台4上进行拼接连接,后焊机机构对拼缝3处进行焊接作业,进而完成叉车门架的焊接作业,并实现降低操作人员的工作强度和改善烧焊效率。
28.焊接平台4上部自一侧向另一侧开设有横向通道46,横向通道46与门架一1的形状相适应,焊接平台4还自一侧向另一侧开设有纵向通道47,并与横向通道46垂直相通,纵向通道47与门架二2的形状相适应。
29.传送机构5包括第一传送带51和第二传送带53,第一传送带51的输入端固定安装有电机一,第一传送带51位于横向通道46的下方,与横向通道46侧壁相抵的门架一1通过第一传送带51朝向纵向通道47的方向运输。第二传送带53的输入端固定安装电机二,第二传送带53位于纵向通道47的下方,与纵向通道47侧壁想的门架二2通过第二传送带53的输出端运输,纵向通道47于第二传送带53的输出端固定安装限位板5548,限位板5548用于对门架二2进行阻挡限位。
30.参照图2、图3,焊接机构6包括焊架一61、焊架二62及动力组件63,焊架一61和焊架二62均有两组且动力组件63有一组,动力组件63用于同时驱动焊架一61倾斜靠近或远离拼缝3,而对拼缝3的平行段同时进行烧焊作业,而焊架二62主要对拼缝3的垂直端进行烧焊作业。
31.焊架一61包括安装板611,安装板611一端始终与动力组件63固定连接,安装板611另一端始终水平平行于拼装后的门架一1,且安装板611呈与拼缝3形状相适应的“l型”。安装板611沿拼缝3的平行段依次间隔设有定位焊头612,相邻定位焊头612之间依次间隔设有两组连续焊头613,两组连续焊头613本身也是间隔设置的。定位焊头612和连续焊头613的碰焊端碰触拼缝3的平行段,定位焊头612和连续焊头613的供电端穿设于安装板611,且定位焊头612与连续焊头613的供电端与外部电源电连接。焊架一61的烧焊方式具体为,定位焊头612与连续焊头613均匀平行缝段碰触,同时通断电若干定位焊头612,进而对拼缝3的平行段进行初步焊接定位,有效改善后续烧焊作业;之后,沿一个方向依次对连续焊头613进行通断电,实现对定位焊点之间连续焊接并形成完整的焊面,并最终改善焊面成型质量。
32.焊架一61处于烧焊状态位置时,焊架二62与焊架一61呈垂直状,焊架二62与焊架一61远离动力组件63的一端半包铰接,即焊架二62可朝向拼缝3转动且背离拼缝3转动受限。焊架二62安装有补充焊头621,补充焊头621有若干且沿拼缝3的垂直段间隔设置,补充焊头621的碰焊端与拼缝3的垂直段碰触,补充焊头621的供电端穿设于焊架二62且与外部电源电连接。焊架二62的烧焊方式具体为,在拼缝3的平行段完成定位烧焊后,对补充焊头621依次通断电实现对拼缝3的垂直段连续碰焊,不仅具有定位加固的效果,也实现将两个拼缝3的平行段进行焊面连接,进一步改善焊面成型质量。
33.焊接平台4顶部转动定位有弧形挡板42,弧形挡板42的内弧朝向拼缝3,弧形挡板42远离其本身的固定端位于门架二2的上方,且与门架一1间隔设置。焊架二62远离焊架一61的端部形成有有凸块,凸块的形状与弧形挡板42的内弧相适应,焊架二62处于烧焊状态位置时,凸块与弧形挡板42的内弧相切阻挡。
34.注意带动焊架二62转动的力应小于迫使弧形挡板42发生转动的力,即弧形挡板42可以改变焊架二62的直线轨迹,迫使焊架二62做转动动作。同时,在本实施例外可设置电机驱动弧形杆转动阻挡或复位。
35.参照图3、图4,焊接平台4顶部沿门架一1的运输方向分别开设有两个容纳槽41,两个容纳槽41分别位于完成拼装的门架一1两侧。容纳槽41底壁沿门架一1的运输方向开设有斜向的安装槽43,安装槽43的一端远离完成拼装的门架一1且远离完成拼装的门架二2,安装槽43的另一端靠近完成拼装的门架一1且靠近完成拼装的门架二2。
36.动力组件63包括一台步进电机631、两组分别带动焊架一61的传动件632及两组分别驱动传动件632的驱动件633,焊接平台4底部开设有安装腔室45,步进电机631安装在安
装腔室45内。
37.两组传动件632分别位于安装槽43内。传动件632包括齿轮6321和齿条6322,齿轮6321转动安装在安装槽43内,齿条6322一端与齿轮6321啮合,齿条6322另一端固定连接于焊架一61,且齿条6322在安装槽43内可沿门架一1运输的方向往复移动。
38.参照图4、图5,驱动件633包括蜗轮6332和竖向轴6333,竖向轴6333顶端同轴固定连接于齿轮6321,竖向轴6333底端转动穿至安装腔室45内并与安装腔室45内壁转动连接。安装腔室45内还设置有蜗杆6331,蜗杆6331一端与安装在安装腔室45内的步进电机631安装连接,蜗杆6331另一端与安装腔室45侧壁转动连接,且蜗杆6331相对齿条6322呈垂直状。位于安装腔室45内的竖向轴6333同轴固定穿设于蜗轮6332,蜗轮6332与蜗杆6331啮合,启动步进电机631,步进电机631驱动蜗杆6331转动,蜗杆6331带动蜗轮6332转动,蜗轮6332带动竖向轴6333转动,竖向轴6333转动带动齿轮6321转动,齿轮6321带动齿条6322沿斜向的安装槽43往复移动,进而使得焊架一61平行靠近或远离完成拼装的门架一1,而通过蜗轮6332蜗杆6331结构,实现对两组拼缝3的平行段进行同步烧焊作业,进而提高烧焊效率。
39.安装槽43侧壁沿齿条6322斜向布置的方向开设有斜向滑槽44,齿条6322周壁固定连接有滑块6323,滑块6323滑动嵌设于斜向滑槽44内,一方面提高齿条6322的支撑稳定,另一方面对齿条6322进一步地导向。
40.本技术实施例的实施原理如下:s1,先利用第二传送带53将门架二2运输至与限位板5548相抵,后利用第一传送带51运输门架一1,直至缺口内壁与门架二2相抵,进而完成叉车门架拼装;s2,正向启动步进电机631,进而驱动蜗杆6331,蜗杆6331带动两个蜗轮6332,进而两组齿条6322同步沿安装槽43运动,即位于容纳槽41内的焊架一61和焊架二62平行靠近门架一1;在s2过程中,焊架二62因与焊架一61转动,故在弧形挡板42作用下,转动朝向拼缝3的水平缝,直至定位焊头612、连续焊头613及补充焊头621均与拼缝3处碰触;s3,对定位焊头612通断电,进行初步焊接,对连续焊头613通断电,进一步焊接,对补充焊头621进行焊接;注意s3中的,定位焊头612之间的倾斜方向保持一致,连续焊头613的倾斜方向保持一致,补充焊头621的倾斜方向保持一致,并且定位焊头612、连续焊头613、补充焊头621之间的倾斜做适应性调整,实现焊面连续性、完整性、美观性、成型度均保持一致性。
41.s4,反向启动步进电机631,焊架二62和焊架一61回退至容纳槽41内,接触弧形挡板42的转动定位限制,将叉车门架吊离。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1