一种激光机的制作方法
1.本实用新型涉及一种激光机。
背景技术:
2.陶瓷基板是指铜箔在高温下直接键合到氧化铝或氮化铝陶瓷基片表面上的特殊工艺板,在实际切割中,固定陶瓷基板的夹具对整个切割工艺具有非常大的影响,良好的切割质量通常要求陶瓷基板在切割过程中拥有比较好的定位精度,能承受较高的气压,并在运动过程中保持较高的效率。
3.传统的陶瓷基板的切割是采用激光切割装置产生激光对陶瓷基板进行切割,在切割过程中通过人工将陶瓷基板固定在工作台上,工作台通过驱动装置驱动其沿水平的x轴方向和y轴方向进行运动,使得激光切割装置对陶瓷基板进行切割,由于陶瓷基板的进料和夹持通过人工进行固定,其加工效率较低。
技术实现要素:
4.因此,针对上述的问题,本实用新型提供一种激光机,它主要解决了现有技术中用于陶瓷基板切割的激光机的加工效率低的问题。
5.为实现上述目的,本实用新型采用了以下技术方案:
6.一种激光机,包括机架、设于机架上的控制系统、进料机构、若干个激光切割机构、出料机构、工作台、第一x轴导向机构、第二x轴导向机构、第三x轴导向机构、y轴导向机构、第一驱动装置、第二驱动装置、第三驱动装置和第四驱动装置,所述第一x轴导向机构上设有导向座,所述第一驱动装置与导向座连接,实现导向座沿第一x轴导向机构运动,所述y轴导向机构设于导向座上,所述工作台设于y轴导向机构上,所述第二驱动装置与工作台连接,实现工作台沿y轴导向机构运动,所述工作台上具有至少两个工位,各所述工位上设有用于夹持陶瓷基板的夹持机构,所述激光切割机构的个数与工位个数相同,且分别设于工位的上侧,所述第二x轴导向机构、和第三x轴导向机构分别设于激光切割机构的周侧,且位于工作台的上侧,所述进料机构设于第二x轴导向机构上,所述第三驱动装置与进料机构连接,实现进料机构沿第二x轴导向机构运动,所述出料机构设于第三x轴导向机构上,所述第四驱动装置与出料机构连接,实现出料机构沿第三x轴导向机构运动。
7.进一步的,所述激光切割机构的个数为两个。
8.进一步的,所述进料机构和出料机构均包括设于第二x轴导向机构或者第三x轴导向机构上的移动座、设于移动座上的z轴导向机构、设于z轴导向机构上的安装座、驱动安装座运动的第五驱动装置、设于安装座上的旋转驱动装置以及设于旋转驱动装置输出端的支架,所述支架上对称设有两个吸附工位,各所述吸附工位上设有用于吸附陶瓷基板的若干个负压吸附头。
9.进一步的,所述支架上且位移吸附工位处成矩形结构,各所述吸附工位上由其对角线交点沿对角线方向向外分布有四个导向槽,所述负压吸附头的个数为四个,分别设于
导向槽上且沿其滑动。
10.进一步的,所述夹持机构包括一个固设于工作台上的定位边、若干个移动边和若干个驱动气缸,各所述驱动气缸分别与各个移动边连接,通过各个驱动气缸分别单独驱动各个移动边与定位边配合,实现对放置于工位上的陶瓷基板的夹持固定。
11.进一步的,所述驱动气缸的个数为三个,所述定位边的个数为三个。
12.通过采用前述技术方案,本实用新型的有益效果是:本激光机,通过工作台沿第一x轴导向机构和y轴导向机构运动,使得工作台进入到进料工位处,并通过第三驱动装置驱动进料机构沿第二x轴导向机构运动实现陶瓷基板的进料,将陶瓷基板放置于工作台上的夹持机构处并进行夹持,工作台运行至加工工位,通过多个激光切割机构实现对多个基板切割,最后通过出料机构实现对陶瓷基板的出料,该种结构通过自动化控制进料、加工和出料,并且同时对多个陶瓷基板进行加工,其加工效率大大提高;进一步的,通过第五驱动装置使得安装座沿z轴导向机构运动,并且通过旋转驱动装置驱动支架的转动,使得支架上吸附工位的负压吸附头实现对陶瓷基板的拾取,该种结构简单,便于陶瓷基板的进料和出料,降低进料和出料中对激光切割机构的影响,提高生产安全性;进一步的,通过各个负压吸附头分别沿导向槽滑动,实现负压吸附头的位置调整,能够使用于不同规格尺寸的陶瓷基板的拾取,且大大提高了拾取的牢固性;进一步的,通过三个驱动气缸分别驱动移动边与固定边配合,起到对陶瓷基板的夹持,夹持效果好。
附图说明
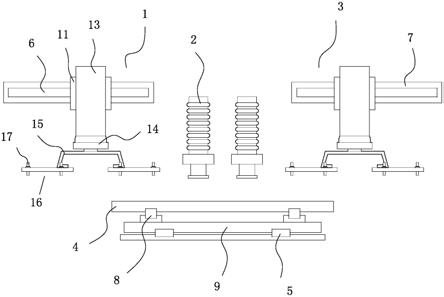
13.图1是本实用新型实施例的正视结构示意图;
14.图2是本实用新型实施例的左视结构示意图;
15.图3是本实用新型实施例中支架的俯视结构示意图;
16.图4是本实用新型实施例中工作台的俯视结构示意图。
具体实施方式
17.现结合附图和具体实施方式对本实用新型进一步说明。
18.本实用新型实施例为:
19.参考图1、图2、图3与图4所示,一种激光机,包括机架、设于机架上的控制系统、进料机构1、两个激光切割机构2、出料机构3、工作台4、第一x轴导向机构5、第二x轴导向机构6、第三x轴导向机构7、y轴导向机构8、第一驱动装置、第二驱动装置、第三驱动装置和第四驱动装置,所述第一x轴导向机构5上设有导向座9,所述第一驱动装置与导向座9连接,实现导向座9沿第一x轴导向机构5运动,所述y轴导向机构8设于导向座9上,所述工作台4设于y轴导向机构8上,所述第二驱动装置与工作台4连接,实现工作台4沿y轴导向机构8运动,所述工作台4上具有两个工位10,各所述工位10上设有用于夹持陶瓷基板的夹持机构20,所述激光切割机构2的个数与工位10个数相同,且分别设于工位10的上侧,所述第二x轴导向机构6、和第三x轴导向机构7分别设于激光切割机构2的周侧,且位于工作台4的上侧,所述进料机构1设于第二x轴导向机构6上,所述第三驱动装置与进料机构1连接,实现进料机构1沿第二x轴导向机构6运动,所述出料机构3设于第三x轴导向机构7上,所述第四驱动装置与出料机构3连接,实现出料机构3沿第三x轴导向机构7运动。
20.本实施例中,所述进料机构1和出料机构3均包括设于第二x轴导向机构6或者第三x轴导向机构7上的移动座11、设于移动座11上的z轴导向机构12、设于z轴导向机构12上的安装座13、驱动安装座13运动的第五驱动装置、设于安装座13上的旋转驱动装置14以及设于旋转驱动装置14输出端的支架15,所述旋转驱动装置14为驱动电机,所述支架15上对称设有两个吸附工位16,各所述吸附工位16上设有用于吸附陶瓷基板的四个负压吸附头17,具体的,所述支架15上且位移吸附工位16处成矩形结构,各所述吸附工位16上由其对角线交点沿对角线方向向外分布有四个导向槽18,所述负压吸附头17的个数为四个,分别设于导向槽18上且沿其滑动。
21.本实施例中,所述夹持机构20包括一个固设于工作台4上的定位边201、三个移动边202和三个驱动气缸203,各所述驱动气缸203分别与各个移动边202连接,通过各个驱动气缸203分别单独驱动各个移动边202与定位边201配合,实现对放置于工位10上的陶瓷基板的夹持固定。
22.上述所述第一驱动装置、第二驱动装置、第三驱动装置、第四驱动装置和第五驱动装置均为气缸,也可以为液压缸、电推杆等实现直线驱动功能的装置;上述所述第一x轴导向机构5、第二x轴导向机构6、第三x轴导向机构7、y轴导向机构8和z轴导向机构12均为导轨与滑块配合实现导向作用的,并沿x轴方向、y轴方向和z轴方向分布;上述所述的负压吸附头为通过负压吸附装置产生负压实现负压吸附作用的技术,其为现有技术,在此不过多赘述。
23.本实用新型的工作方式是:本激光机,通过工作台4沿第一x轴导向机构5和y轴导向机构8运动,使得工作台4进入到进料工位处,并通过第三驱动装置驱动进料机构沿第二x轴导向机构6运动实现陶瓷基板的进料,将陶瓷基板放置于工作台上的夹持机构20处并进行夹持,工作台4运行至加工工位,通过多个激光切割机构2实现对多个基板切割,最后通过出料机构3实现对陶瓷基板的出料,该种结构通过自动化控制进料、加工和出料,并且同时对多个陶瓷基板进行加工,其加工效率大大提高;=通过第五驱动装置使得安装座13沿z轴导向机构12运动,并且通过旋转驱动装置14驱动支架15的转动,使得支架15上吸附工位16的负压吸附头17实现对陶瓷基板的拾取,该种结构简单,便于陶瓷基板的进料和出料,降低进料和出料中对激光切割机构的影响,提高生产安全性;通过各个负压吸附头17分别沿导向槽18滑动,实现负压吸附头17的位置调整,能够使用于不同规格尺寸的陶瓷基板的拾取,且大大提高了拾取的牢固性;通过三个驱动气缸203分别驱动移动边202与固定边201配合,起到对陶瓷基板的夹持,夹持效果好。
24.尽管结合优选实施方案具体展示和介绍了本实用新型,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本实用新型的精神和范围内,在形式上和细节上可以对本实用新型做出各种变化,均为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1