一种机器人焊接用工件上料机构的制作方法
1.本实用新型涉及机器人技术领域,具体为一种机器人焊接用工件上料机构。
背景技术:
2.焊接,也称作熔接、镕接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术,而在焊接前先将待加工件送到焊接设备的下方,之后再对工件进行焊接,因此需要工件上料机构辅助焊接设备进行焊接。
3.例如,中国专利公告号cn211136110u公开了一种机器人焊接用工件上料机构,其基本描述为:通过推动杆、滑动板、抵紧杆、限位块、第一弹簧、限位杆之间的配合使用,实现了对待加工件上料,同时实现了对待加工件的固定,避免其焊接过程中发生晃动的情况,有效地保证了焊接质量,通过推动板、第二弹簧、滑动板之间的配合使用,当需要对取出已经焊接完成的待加工件时,其能够起到推动作用,避免了人工拉动的情况;实际上在使用时,由于第二弹簧在使用过程中具有伸缩性,导致抵紧杆在工件焊接过程中出现晃动,从而降低了该装置的使用效果。
4.于是,发明人有鉴于此,秉持多年该相关行业丰富的设计开发及实际制作的经验,针对现有的结构及缺失予以研究改良,提供一种机器人焊接用工件上料机构。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本实用新型提供了一种机器人焊接用工件上料机构,解决了上述背景技术中提出的问题。
7.(二)技术方案
8.为实现上述目的,本实用新型提供如下技术方案:一种机器人焊接用工件上料机构,包括收集箱,所述收集箱上表面的右侧固定连接有放置装置,所述收集箱的内壁固定连接有透气板,所述收集箱的内壁固定连接有吸收层,所述收集箱左侧面的底部插接有收集风扇,所述收集箱上表面的前后两侧均固定连接有连接框,所述连接框的内部滑动连接有移动块,所述移动块右侧面固定连接有移动板,所述移动块外侧面的中部插接有连接销,所述透气板上表面的左侧固定连接有工作板,所述工作板上表面的左侧固定连接有放置框,所述放置框的内部设置有接触板,所述接触板上表面的左侧设置有固定销,所述移动板上表面的中部开设有插接槽。
9.所述放置装置包括移动柱,所述移动柱左侧面的中部固定连接有放置板,所述收集箱上表面的右侧固定连接有推杆电机,所述推杆电机的输出端与移动柱右侧面的中部插接,所述移动柱上表面的中部固定连接有接触框,所述接触框的内部固定连接有辅助弹簧,所述接触框的内部插接有缓冲柱,所述辅助弹簧的外端与缓冲柱的内侧面固定连接,所述移动柱的外侧面固定连接有连接块,所述连接块的外侧面与连接框的内部滑动连接,所述连接块的外侧面固定连接有连接片,所述连接片上表面的中部插接有移动杆,所述移动杆
的外表面套接有缓冲弹簧,所述移动杆的顶端固定连接有操作环,所述移动杆和缓冲弹簧的底端固定连接有插接块,所述插接块的下表面固定连接有移动轮。
10.优选的,所述移动块外侧面的中部开设有圆孔,圆孔的尺寸与连接销的尺寸相适配。
11.优选的,所述接触板上表面的左侧开设有螺纹孔,固定销的外表面设置有外螺纹,固定销与接触板螺纹连接。
12.优选的,所述放置框的内部开设有滑槽,接触板为方形滑板,接触板与放置框滑动连接。
13.优选的,所述操作环和移动块的外表面均设置有包裹层,包裹层的外表面设置有防滑凸粒。
14.优选的,所述缓冲弹簧的数量为两组,缓冲弹簧和辅助弹簧均由铬钒合金钢材料制作而成。
15.(三)有益效果
16.与现有技术相比,本实用新型提供了一种机器人焊接用工件上料机构,具备以下有益效果:
17.1、该机器人焊接用工件上料机构,通过移动轮向左移动进入插接槽内,使得移动轮能够引导插接块插入插接槽内对工件进行限位,再配合缓冲柱向内移动压缩辅助弹簧对工件进行二次固定,进而可防止该装置内零部件固定工件在焊接过程中出现晃动,更便于操作人员操纵该装置内零部件与工件进行贴合,增强了该装置内零部件的适用性,进一步提高了该装置内零部件在工作过程中的使用效果。
18.2、该机器人焊接用工件上料机构,通过操纵移动块沿着连接框向右移动,使得移动块向右移动带动移动板向右移动,进而更便于操作人员根据工件尺寸对该装置内零部件进行调整,避免零部件难以调整对该装置固定工件造成影响,加强了操作人员调整该装置内零部件位置的多样性,缩短了操作人员调整该装置内零部件位置所需要的时间,进一步提升了该装置内零部件在使用过程中的工作效率。
19.3、该机器人焊接用工件上料机构,通过操纵接触板沿着放置框向内移动与工件接触,再顺时针旋转固定销将接触板与放置框进行连接固定,使得该装置内零部件在使用过程中能够更加的稳固,进而可防止该装置内零部件在使用过程中出现松动的现象,进一步提高了该装置内零部件在使用过程中的稳定性,降低了零部件出现松动现象对该装置正常使用造成的影响,更便于操作人员操纵零部件对该装置进行固定。
附图说明
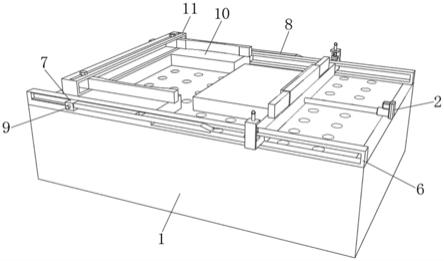
20.图1为本实用新型结构示意图;
21.图2为本实用新型结构竖剖示意图;
22.图3为本实用新型放置装置结构竖剖示意图。
23.图中:1、收集箱;2、放置装置;201、移动柱;202、放置板;203、推杆电机;204、接触框;205、辅助弹簧;206、缓冲柱;207、连接块;208、连接片;209、移动杆;210、缓冲弹簧;211、操作环;212、插接块;213、移动轮;3、透气板;4、吸收层;5、收集风扇;6、连接框;7、移动块;8、移动板;9、连接销;10、工作板;11、放置框;12、接触板;13、固定销。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1-3,本实用新型提供一种技术方案:一种机器人焊接用工件上料机构,包括收集箱1,收集箱1上表面的右侧固定连接有放置装置2,收集箱1的内壁固定连接有透气板3,收集箱1的内壁固定连接有吸收层4,收集箱1左侧面的底部插接有收集风扇5,收集风扇5的型号为fag-400f,收集箱1上表面的前后两侧均固定连接有连接框6,连接框6的内部滑动连接有移动块7,操纵移动块7沿着连接框6向右移动,使得移动块7向右移动带动移动板8向右移动,进而更便于操作人员根据工件尺寸对该装置内零部件进行调整,避免零部件难以调整对该装置固定工件造成影响,加强了操作人员调整该装置内零部件位置的多样性,缩短了操作人员调整该装置内零部件位置所需要的时间,进一步提升了该装置内零部件在使用过程中的工作效率,移动块7右侧面固定连接有移动板8,移动块7外侧面的中部插接有连接销9,透气板3上表面的左侧固定连接有工作板10,工作板10上表面的左侧固定连接有放置框11,放置框11的内部设置有接触板12,操纵接触板12沿着放置框11向内移动与工件接触,再顺时针旋转固定销13将接触板12与放置框11进行连接固定,使得该装置内零部件在使用过程中能够更加的稳固,进而可防止该装置内零部件在使用过程中出现松动的现象,进一步提高了该装置内零部件在使用过程中的稳定性,降低了零部件出现松动现象对该装置正常使用造成的影响,更便于操作人员操纵零部件对该装置进行固定,接触板12上表面的左侧设置有固定销13,移动板8上表面的中部开设有插接槽。
26.放置装置2包括移动柱201,移动柱201左侧面的中部固定连接有放置板202,收集箱1上表面的右侧固定连接有推杆电机203,推杆电机203的型号为lap22,推杆电机203的输出端与移动柱201右侧面的中部插接,移动柱201上表面的中部固定连接有接触框204,接触框204的内部固定连接有辅助弹簧205,接触框204的内部插接有缓冲柱206,辅助弹簧205的外端与缓冲柱206的内侧面固定连接,移动柱201的外侧面固定连接有连接块207,连接块207的外侧面与连接框6的内部滑动连接,连接块207的外侧面固定连接有连接片208,连接片208上表面的中部插接有移动杆209,移动杆209的外表面套接有缓冲弹簧210,移动杆209的顶端固定连接有操作环211,移动杆209和缓冲弹簧210的底端固定连接有插接块212,插接块212的下表面固定连接有移动轮213,移动轮213向左移动进入插接槽内,使得移动轮213能够引导插接块212插入插接槽内对工件进行限位,再配合缓冲柱206向内移动压缩辅助弹簧205对工件进行二次固定,进而可防止该装置内零部件固定工件在焊接过程中出现晃动,更便于操作人员操纵该装置内零部件与工件进行贴合,增强了该装置内零部件的适用性,进一步提高了该装置内零部件在工作过程中的使用效果。
27.在本实用新型中,为了提高零部件间的配合,因此在移动块7外侧面的中部开设有圆孔,圆孔的尺寸与连接销9的尺寸相适配,缩小了零部件间的空隙,最大限度的发挥了零部件的作用。
28.在本实用新型中,为了使该装置在使用时更加稳固,从而在接触板12上表面的左侧开设有螺纹孔,固定销13的外表面设置有外螺纹,固定销13与接触板12螺纹连接,防止零
部件出现松动,增强了该装置的稳定性。
29.在本实用新型中,为了使操作步骤更加流畅,因此在放置框11的内部开设有滑槽,接触板12为方形滑板,接触板12与放置框11滑动连接,更便于零部件进行移动,增强了操作步骤的流畅性。
30.在本实用新型中,为了防止使用时打滑,从而在操作环211和移动块7的外表面均设置有包裹层,包裹层的外表面设置有防滑凸粒,增大手与零部件间的摩擦力,减少手打滑的次数。
31.在本实用新型中,为了使该装置更便于操作人员使用,因此设置缓冲弹簧210的数量为两组,缓冲弹簧210和辅助弹簧205均由铬钒合金钢材料制作而成,减少零部件的磨损时间,延长了零部件的使用寿命。
32.该文中出现的电器元件均与外界的主控器及220v市电电连接,并且主控器可为计算机等起到控制的常规已知设备。
33.在使用时,拔出连接销9,操纵移动块7沿着连接框6向右移动,移动块7向右移动带动移动板8向右移动,移动好后插入连接销9,将工件放置在放置板202的上表面,启动推杆电机203,推杆电机203的输出端向左移动带动移动柱201向左移动,移动柱201向左移动带动放置板202向左移动,移动柱201向左移动带动连接块207沿着连接框6内向左移动,连接块207向左移动带动连接片208向左移动,连接片208向左移动带动移动杆209向左移动,移动杆209向左移动带动插接块212向左移动,插接块212向左移动带动移动轮213向左移动,移动轮213向左移动与移动板8接触并继续向左滚动,待工件与放置框11接触后关闭推杆电机203,移动轮213进入插接槽内,移动轮213向下移动带动插接块212向下移动插入插接槽内,插接块212向下移动带动移动杆209向下移动,使缓冲弹簧210伸长,逆时针旋松固定销13,操纵接触板12沿着放置框11向内移动,接触板12向内移动带动缓冲柱206向内移动,缓冲柱206向内移动进入接触框204内,使辅助弹簧205收缩,接触板12向内移动与工件接触,接触后顺时针旋转固定销13将接触板12与放置框11进行连接固定,再对工件进行焊接,启动收集风扇5,收集风扇5的输出端旋转经过透气板3将空气吸入收集箱1内,穿过吸收层4将空气中的异味吸收,空气沿着收集风扇5排出。
34.综上所述,该机器人焊接用工件上料机构,通过移动轮213向左移动进入插接槽内,使得移动轮213能够引导插接块212插入插接槽内对工件进行限位,再配合缓冲柱206向内移动压缩辅助弹簧205对工件进行二次固定,进而可防止该装置内零部件固定工件在焊接过程中出现晃动,更便于操作人员操纵该装置内零部件与工件进行贴合,增强了该装置内零部件的适用性,进一步提高了该装置内零部件在工作过程中的使用效果。
35.该机器人焊接用工件上料机构,通过操纵移动块7沿着连接框6向右移动,使得移动块7向右移动带动移动板8向右移动,进而更便于操作人员根据工件尺寸对该装置内零部件进行调整,避免零部件难以调整对该装置固定工件造成影响,加强了操作人员调整该装置内零部件位置的多样性,缩短了操作人员调整该装置内零部件位置所需要的时间,进一步提升了该装置内零部件在使用过程中的工作效率。
36.该机器人焊接用工件上料机构,通过操纵接触板12沿着放置框11向内移动与工件接触,再顺时针旋转固定销13将接触板12与放置框11进行连接固定,使得该装置内零部件在使用过程中能够更加的稳固,进而可防止该装置内零部件在使用过程中出现松动的现
象,进一步提高了该装置内零部件在使用过程中的稳定性,降低了零部件出现松动现象对该装置正常使用造成的影响,更便于操作人员操纵零部件对该装置进行固定。
37.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1