一种粉末热压成型设备的制作方法
1.本实用新型属于粉末成型设备技术领域,具体涉及一种粉末热压成型设备。
背景技术:
2.粉末热压成型工艺是将已经完成冷压成型的磁性坯体,经过绕线工艺,再经过填料、检测、搬运等一系列工作,然后在加热条件下,施加一定压力进而成型得到具有一定形状和结构的产品的工艺过程,而可对粉末进行热压成型工艺的设备就是粉末热压成型设备。
3.现有技术中目前行业内在热压制磁性粉末产品时,常规的操作还是人工填料、人工检测、人工替换不良品等,存在工人劳动强度大、生产过程精度低等缺点,因此难以满足实际生产需求。
技术实现要素:
4.本实用新型的目的在于提供一种粉末热压成型设备,以解决上述背景技术中提出的技术问题。
5.为了实现上述目的,本实用新型公开了一种粉末热压成型设备,包括控制柜,在控制柜中设有控制系统,在所述控制柜的柜顶上设有底板,底板上设有载具输送轨道和运动机构,所述运动机构包括沿着载具输送轨道依次闭环设置的上料机构、粉末自动填充机构、上料搬运机构、热压成型机构、下料搬运机构、脱料机构、拨爪机构和位移模组;所述控制系统与运动机构之间电气连接。
6.载具输送轨道的移动精度误差为0.01mm以下,载具输送轨道可输送载具,载具输送轨道为水平设置,可有效地将载具从一点输送至另一点。
7.进一步地,所述载具输送轨道包括彼此平行设置的第一载具输送轨道和第二载具输送轨道,以及垂直设于第一载具输送轨道左侧和第二载具输送轨道左侧的第三载具输送轨道,第一载具输送轨道和第二载具输送轨道的长度相等,第三载具输送轨道的长度大于第一载具输送轨道与第二载具输送轨道之间的间距;第一载具输送轨道的左端部与第三载具输送轨道的上端部对齐,第三载具输送轨道的下端部延伸出第二载具输送轨道的外侧;第三载具输送轨道上延长出第二载具输送轨道外侧的区域为ng暂放区域。
8.ng暂放区域可用于暂存上料不符合要求以及填料不符合要求的载具,该区域中的不合格品可由人工操作取出,经过调整后重新放入上料机构中进行再次上料,或者放入粉末自动填充机构中进行再次自动填粉。
9.进一步地,在第一载具输送轨道与第三载具输送轨道相交的位置处设有上料机构,在第三载具输送轨道的上方,与上料机构相邻依次设有第一视觉检测机构、粉末自动填充机构和第二视觉检测机构。
10.第一视觉检测机构和第二视觉检测机构可分别对上料完成的载具,以及填料完成的载具进行视觉检测,可检测精度0.01mm,能够检出不良品,并向控制系统发出信号及时地
将不良品挑出。
11.粉末自动填充机构的填粉精度可控制在0.01g,能保证填粉的抛光精度做到镜面级,确保填粉质量。
12.进一步地,所述上料机构包括依次独立设置的圆振机构、平振机构和吸料上料机构;其中吸料上料机构与第一视觉检测机构和相邻设置。
13.吸料上料机构采用真空吸附系统连接吸嘴实现吸料和上料,吸嘴上设置高精度的直径为1.0mm的内壁光洁的微孔,吸嘴头部设有安全防护机构,在运动过程中吸附的物料不会轻易掉落。
14.进一步地,在第一载具输送轨道和第二载具输送轨道之间,设有热压成型机构,热压成型机构中依次设有自动恒温区、热压成型区和冷却区,自动恒温区与第二载具输送轨道相邻设置,冷却区与第一载具输送轨道相邻设置。
15.本实用新型中的冷却区可实现载具的快速均匀散热,温度可在10-50℃温度范围内调节,载具120℃从下降到30℃仅需要20s。
16.进一步地,所述热压成型机构为≧2台,并列设置在第一载具输送轨道和第二载具输送轨道之间。设置多台热压成型机构,可以提高工作效率,在不同的应用场景中,根据实际需要选择合适台数的热压成型机构,并列设置在第一载具输送轨道和第二载具输送轨道之间,可多工位同时进行热压工艺的操作。
17.进一步地,在第三载具输送轨道上ng暂放区域的上方设有载具搬运机构,在第二载具输送轨道上与自动恒温区相连接的位置处设有上料搬运机构,在第一载具输送轨道上与冷却区相邻的位置处设有下料搬运机构,在第一载具输送轨道上的下料搬运机构的左侧,依次设有脱料机构、拨爪机构和位移模组。
18.进一步地,在控制柜的底部设有防滑踏板,防滑踏板为铝板,铝板强度高,铝板表面设有防滑凸点,可有效增加摩擦力。
19.采用本实用新型的粉末热压成型设备进行粉末热压成型的工艺过程包括如下步骤:
20.(1)在上料机构中加入待加工产品,上料机构将待加工产品按照一定的顺序和方向依次摆放至载具中;
21.(2)载具中摆放完毕待加工产品后,由载具输送轨道将载具输送至粉末自动填料机构中,粉末自动填料机构对载具中的待加工产品进行自动填粉,填粉完成后,由上料搬运机构将载具输送进入热压成型机构中;
22.(3)热压完成后,下料搬运机构将载具从热压成型机构中搬运至载具输送轨道中,载具沿着载具输送轨道进入脱料机构中;
23.(4)脱料机构首先将载具错位,使载具的上孔与下孔对齐轴心,脱料机构下压,将热压成型后的产品脱出载具;
24.(5)成型后的产品脱出载具后,拨爪机构移动载具,在移动的过程中,使载具复位;然后位移模组将载具移动至载具输送轨道中,上料机构即可对载具进行下一次上料,随后进行自动填料和热压成型作业,从而实现循环工作。
25.与现有产品相比,本实用新型的粉末热压成型设备具有如下优点:
26.(1)本实用新型的粉末热压成型设备通过设置在控制柜中的控制系统控制运动机
构的动作,自动化程度高,可大大降低工人的劳动强度;
27.(2)本实用新型的粉末热压成型设备通过自动化控制程序实现作业过程,整个过程均由自动化操作完成,热压成型得到的产品精度高,产品的稳定性好;
28.(3)本实用新型的粉末热压成型设备中运动机构为闭环设置,可实现载具连续的上料、热压压制成型、下料工序,设备生产效率高。
附图说明
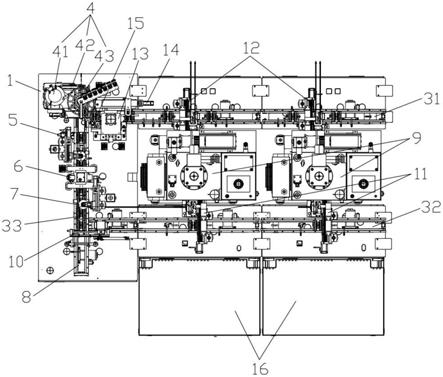
29.图1:实施例1中粉末热压成型设备的俯视结构示意图。
30.图2:实施例1中粉末热压成型设备的立体结构示意图。
31.附图标记说明:1-底板;2-控制柜;4-上料机构;5-第一视觉检测机构;6-粉末自动填充机构;7-第二视觉检测机构;8-ng暂放区域;9-热压成型机构;10-载具搬运机构;11-上料搬运机构;12-下料搬运机构;13-脱料机构;14-拨爪机构;15-位移模组;16-防滑踏板;31-第一载具输送轨道;32-第二载具输送轨道;33-第三载具输送轨道;41-圆振机构;42-平振机构;43-吸料上料机构。
具体实施方式
32.下面通过具体实施例进行详细阐述,说明本实用新型的技术方案。
33.实施例1
34.如图1-2所示,为粉末热压成型设备的结构示意图。
35.一种粉末热压成型设备,包括控制柜2和安装在控制柜2柜顶上的底板1,在底板1上设有载具输送轨道,载具输送轨道包括两条平行设置的第一载具输送轨道31和第二载具输送轨道32,以及垂直设于第一载具输送轨道31和第二载具输送轨道32左侧的第三载具输送轨道33。
36.在第一载具输送轨道31与第三载具输送轨道33相交的位置处设有上料机构4,上料机构4包括依次独立设置的圆振机构41、平振机构42和吸料上料机构43,在第三载具输送轨道33的上方,依次设有第一视觉检测机构5、粉末自动填充机构6和第二视觉检测机构7,其中第一视觉检测机构5和吸料上料机构43相邻设置;在第三载具输送轨道33的下端部设有ng暂放区域8;
37.第三载具输送轨道33的长度大于第一载具输送轨道31与第二载具输送轨道32之间的间距,第一载具输送轨道31与第二载具输送轨道32的长度相等,第一载具输送轨道31的左端部与第三载具输送轨道33的上端部对齐,第三载具输送轨道33的下端部延伸出第二载具输送轨道32的外侧,第三载具输送轨道33上延长出第二载具输送轨道32外侧的区域为ng暂放区域8;
38.该实施例1中,在第一载具输送轨道31和第二载具输送轨道32之间,并排设有两台热压成型机构9,热压成型机构9中依次设有自动恒温区、热压成型区和冷却区,自动恒温区与第二载具输送轨道32相邻设置,冷却区与第一载具输送轨道31相邻设置。热压成型机构9设置为两台,即可通过双工位同时进行热压成型,提高加工效率。
39.在第一载具输送轨道31上ng暂放区域8的上方设有载具搬运机构10,在第二载具输送轨道32上与自动恒温区相连接的位置处设有上料搬运机构11,第一载具输送轨道31上
与冷却区相邻的位置处设有下料搬运机构12,在第一载具输送轨道31上的下料搬运机构12的左侧,依次设有脱料机构13、拨爪机构14和位移模组15。
40.控制柜2中设有控制系统,控制系统与设置在底板1上的载具输送轨道、上料机构4、第一视觉检测机构5、粉末自动填充机构6、第二视觉检测机构7、载具搬运机构10、热压成型机构9、上料搬运机构11、下料搬运机构12、脱料机构13、拨爪机构14、位移模组15等均为电气连接,控制系统可对这些运动机构的动作进行控制。
41.在控制柜2的底部设有防滑踏板16,防滑踏板16为铝材质,在防滑踏板16的表面设有防滑凸点,操作工人可站立于防滑踏板16上进行操作,防滑踏板16具有防滑功能,可确保操作工人的操作安全。
42.采用本实施例1中的粉末热压成型设备进行粉末热压成型的工艺过程包括如下步骤:
43.(1)在上料机构4中加入待加工产品,圆振机构41将待加工产品筛选出正反面,再经过平振机构42将待加工产品依次排列整齐,吸料上料机构43将待加工产品从平振机构42中吸附出来并依次摆放至载具中;
44.(2)载具中摆放完毕待加工产品后,由第三载具输送轨道33输送经过第一视觉检测机构5,第一视觉检测机构5检测载具中待加工产品是否摆放完全及摆放位置是否正确:若载具中待加工产品摆放不完全或摆放位置部正确,则由第一视觉检测机构5向控制系统发出ng信号,控制系统控制第三载具输送轨道33继续输送该载具,并由载具搬运机构10将其搬运至ng暂放区域8中;若载具中待加工产品摆放完全且摆放位置正确,则由第一视觉检测机构5向控制机构发出ok信号,控制机构控制该载具经过第三载具输送轨道33进入粉末自动填充机构6中;
45.(3)粉末自动填充机构6对载具中的待加工产品进行自动填粉,填粉精度控制在0.01g,填粉完成后,第三载具输送轨道33将载具输送经过第二视觉检测机构7,第二视觉检测机构7检测填粉质量,并判断ok/ng,填粉不合格的载具会由第二视觉检测机构7向控制机构发出ng信号,控制机构控制第三载具输送轨道33继续输送该载具,并由载具搬运机构10将其搬运至ng暂放区域8中;填粉合格的载具会由第二视觉检测机构7向控制机构发出ok信号,控制机构控制该载具转移进入第二载具输送轨道32中;
46.步骤(2)和(3)中存放在ng暂放区域8中的载具可由人工取出,经过调整后重新放入上料机构4中进行再次上料,或者放入粉末自动填充机构6中进行再次自动填粉。
47.(4)进入第二载具输送轨道32中的载具,输送至热压成型机构9的位置处时,由上料搬运机构11将其搬运至热压成型机构9的自动恒温区中进行预热,当载具本体温度达到70℃时,上料搬运机构11将载具送入热压成型区中进行热压成型;热压成型保持时间为40-60s,待粉末填料热固化完成后,上料搬运机构11将载具从热压成型区搬出至冷却区中进行冷却,待载具温度降低至30℃时,下料搬运机构12将载具搬运至第一载具输送轨道31中,载具沿着第一载具输送轨道31进入脱料机构13中;
48.(5)脱料机构13首先将载具错位,使载具的上孔与下孔对齐轴心,脱料机构13下压,将热压成型后的产品脱出载具;
49.(6)成型后的产品脱出载具后,拨爪机构14移动载具,在移动的过程中,使载具复位;然后位移模组15将载具移动至第三载具输送轨道33中,上料机构4即可对载具进行二次
上料,随后进行自动填料和热压成型作业,从而实现循环工作。
50.以上所述仅为本实用新型的较佳实施例,并不用于限制本实用新型,凡在本实用新型的设计构思之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1