一种钢格板封边焊接设备的制作方法
1.本实用新型涉及焊接设备技术领域,特别是涉及一种钢格板封边焊接设备。
背景技术:
2.由钢格板行业生产工艺所致,原材料下料精度不足,传统焊接机器人通过示教再现的方式,会频繁发生撞机,无法实现自动化生产。
技术实现要素:
3.本实用新型的目的是针对现有技术中存在的技术缺陷,而提供一种钢格板封边焊接设备。
4.为实现本实用新型的目的所采用的技术方案是:
5.一种钢格板封边焊接设备,包括矩形状的焊接机架,所述焊接机架的中部形成的空间中布置有焊接机器人,所述焊接机器人的两侧中心对称对称有第一旋转焊接工位以及第二旋转焊接工位,所述焊接机器人的前端设有的焊枪以及激光视觉传感器。
6.其中,所述焊接机器人的机械臂上设有送丝机,所述焊接机器人的机座上方的旋转盘上设有焊丝盘。
7.其中,所述第一旋转焊接工位以及第二旋转焊接工位分别设置有工件定位板。
8.其中,所述焊接机架的轴向方向一侧布置焊接主机。
9.本实用新型通过接机架的中部形成的空间中布置有焊接机器人,所述焊接机器人的两侧中心对称对称有第一旋转焊接工位以及第二旋转焊接工位,所述焊接机器人的前端设有的焊枪以及激光视觉传感器,通过机器人匹配外部寻位传感器,实时寻找待焊接焊道的准确位置,有效避免撞机的发生,提高焊接效率和焊接质量。
附图说明
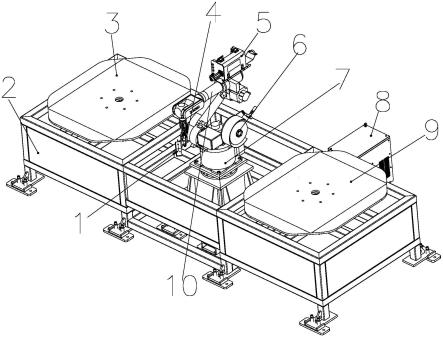
10.图1是本实用新型的钢格板封边焊接设备整体构造示意图。
11.图2是本实用新型的图1中的六轴机器人的放大示意图。
具体实施方式
12.以下结合附图和具体实施例对本实用新型作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
13.如图1所示,本实用新型实施例的钢格板封边焊接设备,包括矩形状的焊接机架2,所述焊接机架的中部形成的空间中布置有焊接机器人7,所述焊接机器人的两侧中心对称对称有第一旋转焊接工位3以及第二旋转焊接工位9,所述焊接机器人的前端设有的焊枪4以及激光视觉传感器1(寻位传感器)。
14.其中,所述焊接机器人的机械臂10上设有送丝机5,所述焊接机器人的机座上方的旋转盘上设有焊丝盘6。
15.其中,所述第一旋转焊接工位以及第二旋转焊接工位分别设置有工件定位板,所述工件定位板的底部与旋转驱动电机(未示出)的驱动轴连接,受所述旋转驱动电机的驱动可以旋转相应的角度,以改变位置。
16.其中,所述焊接机架2的轴向方向一侧布置焊接主机8。
17.其中,所述的焊接机架2由矩形管焊接或钉合形成,其前后侧,左右端均配置有封板,所述旋转驱动电机(未示出)布置于所述焊接机架2的内部,所述的焊接机架2的底部带有八个调平地脚或支撑地脚。
18.其中,所述的焊接机器人采用现有六轴机器人,置于所述的焊接机架的中间,即位于两个所述第一旋转焊接工位以及第二旋转焊接工位之间。
19.其中,所述的焊接机架与第一旋转焊接工位以及第二旋转焊接工位、焊接机器人固定安装在一起,所述焊接机器人的底部固定所述焊接机架的底部中间的支撑底板上,所述支撑底板为下凸型设置。
20.本实用新型的钢格板封边焊接设备使用过程如下:
21.将待焊接钢格板通过夹具固定在旋转焊接工位的工件定位板上,机器人夹持寻位传感器进行扫描,通过寻位传感器扫描得到位置数据,引导机器人根据位置数据执行焊接工作;工件的单边焊接完成后,旋转焊接工位的工件定位板水平旋转预定角度;另一边重复执行以上工作,直到该工件定位板上的工件焊接完成;然后焊接机器人旋转,使焊枪位于另一个工件定位板的上方,对另一个工件定位板上预先放好的工件如前所述进行焊接,直到焊接完成。
22.其中,在机器人旋转到另一侧焊接的另一个工件定位板上的工件的同时,焊接完成后的工件执行下料以及换料工作的工序,这样大大提升了生产节拍,焊接机器人可以实现连续生产作业,需须等待下料换料作业。
23.本实用新型钢格板封边焊接设备,通过接机架的中部形成的空间中布置有焊接机器人,所述焊接机器人的两侧中心对称对称有第一旋转焊接工位以及第二旋转焊接工位,所述焊接机器人的前端设有的焊枪以及激光视觉传感器,通过机器人匹配外部寻位传感器,实时寻找待焊接焊道的准确位置,有效避免撞机的发生,提高焊接效率和焊接质量。
24.以上所述仅是本实用新型的优选实施方式,应当指出的是,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种钢格板封边焊接设备,其特征在于,包括矩形状的焊接机架,所述焊接机架的中部形成的空间中布置有焊接机器人,所述焊接机器人的两侧中心对称对称有第一旋转焊接工位以及第二旋转焊接工位,所述焊接机器人的前端设有的焊枪以及激光视觉传感器。2.根据权利要求1所述钢格板封边焊接设备,其特征在于,所述焊接机器人的机械臂上设有送丝机,所述焊接机器人的机座上方的旋转盘上设有焊丝盘。3.根据权利要求2所述钢格板封边焊接设备,其特征在于,所述第一旋转焊接工位以及第二旋转焊接工位分别设置有工件定位板。4.根据权利要求3所述钢格板封边焊接设备,其特征在于,所述焊接机架的轴向方向一侧布置焊接主机。5.根据权利要求1-4任一项所述钢格板封边焊接设备,其特征在于,所述的焊接机架与第一旋转焊接工位以及第二旋转焊接工位、焊接机器人固定安装在一起,所述焊接机器人的底部固定所述焊接机架的底部中间的支撑底板上,所述支撑底板为下凸型设置。6.根据权利要求1所述钢格板封边焊接设备,其特征在于,所述的焊接机器人采用现有六轴机器人。7.根据权利要求3所述钢格板封边焊接设备,其特征在于,所述工件定位板的底部与旋转驱动电机的驱动轴连接,受所述旋转驱动电机的驱动而旋转,所述旋转驱动电机布置于所述焊接机架的内部,所述的焊接机架的底部带有八个调平地脚或支撑地脚。
技术总结
本实用新型公开一种钢格板封边焊接设备,包括矩形状的焊接机架,所述焊接机架的中部形成的空间中布置有焊接机器人,所述焊接机器人的两侧中心对称对称有第一旋转焊接工位以及第二旋转焊接工位,所述焊接机器人的前端设有的焊枪以及激光视觉传感器。本实用新型通过接机架的中部形成的空间中布置有焊接机器人,所述焊接机器人的两侧中心对称对称有第一旋转焊接工位以及第二旋转焊接工位,所述焊接机器人的前端设有的焊枪以及激光视觉传感器,可以实现有效焊接生产。实现有效焊接生产。实现有效焊接生产。
技术研发人员:张天江 刘源 张华平 陈聪 杨春宁
受保护的技术使用者:天津泰华易而速机器人科技有限公司
技术研发日:2021.12.29
技术公布日:2022/6/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1