一种12轴全电伺服拉弯机的制作方法
1.本发明涉及一种12轴全电伺服拉弯机。
背景技术:
2.拉弯机主要用来对长条型产品进行弯曲造型,常规的拉弯机结构通常选择液压油缸作为整个设备的动力源,通过液压油缸的主轴,来推动拉弯机的夹持柱进行夹持、弯曲和移动等动作,传统的拉弯机成型产品时,产品的精度不稳定,成型精度不高,设备能耗过高,污染环境,使用麻烦,设备运转冲击振动大,噪音高,维修频率大等固有缺陷,液压油缸作为动力源时,需要多组液压控制阀来进行辅助,这会造成夹持柱的体积偏大,同时夹持立柱组装时,需要多个工人配合才能够完成液压系统的布置,大大提高了劳动力成本,同时大量使用液压元件作为动力,液压系统比较复杂,后期漏油故障概率比较多,另外会对环境造成一定污染,维护工作量大,在油泵电机开机后要一直运转,需要配备专用冷冻机对设备液压油进行冷却,功率消耗很大,不够节省电能。
技术实现要素:
3.本发明所要解决的技术问题是,提供一种12轴全电伺服拉弯机,解决了上述现有技术中产品精度不稳定、成型精度不高、设备耗能大、污染环境、噪音高、维修频率大的问题。
4.为解决上述技术问题,本发明提供的一种12轴全电伺服拉弯机,包括一机架和一工作平台组件,所述机架的两侧对称设有两个第一滑板和两个第一伺服驱动组件,所述的两个第一伺服驱动组件分别用于驱动两个第一滑板沿x轴水平方向运动,所述的工作平台组件设置在两个第一滑板之间,每个第一滑板上均设有一安装架组件和一第二伺服驱动组件,所述的安装架组件包括一第二滑板、一安装架和一第三伺服驱动组件,所述的第二伺服驱动组件用于驱动第二滑板沿y轴水平方向运动,所述的安装架与第二滑板转动连接,所述的第三伺服驱动组件用于驱动安装架以z轴为轴心做旋转运动,所述的安装架上设有一第三滑板和一第四伺服驱动组件,所述的第三滑板与安装架滑动连接,所述的第四伺服驱动组件用于驱动第三滑板沿着z轴水平方向运动,所述的第三滑板靠近工作平台组件的一侧转动连接有一第一安装块,所述的第三滑板远离工作平台组件的一侧设有一用于驱动第一安装块以x轴为轴心做旋转运动的第五伺服驱动组件,所述的第一安装块靠近工作平台组件的一侧铰链连接有一第二安装块,所述的第一安装块的一侧设有用于驱动第二安装块以y轴为轴心做旋转运动的第六伺服驱动组件,所述的第二安装块靠近工作平台组件的一侧设有一夹持头。
5.作为优选,所述的工作平台组件包括一工作平台、一底板和至少一个支架,所述的底板安装在工作平台上,所述的工作平台上设有举模器,所述的举模器设置在底板与工作平台之间,所述的支架竖直设置在底板的上端面。
6.作为优选,所述的机架的两侧对称设有第一导轨,所述的两个第一滑板的底部分
别与两个第一导轨滑动连接。
7.作为优选,所述的每个第一伺服驱动组件均包括一第一伺服电机和一第一丝杆,所述的第一伺服电机的输出端与第一丝杆的一端固定连接,所述的第一滑板的底部设有第一凸块,所述的第一丝杆与第一凸块螺纹连接。
8.作为优选,每个第一滑板的顶部均设有第二导轨,所述的第二滑板的底部与第二导轨滑动连接,所述的第二伺服驱动组件包括一第二伺服电机和一第二丝杆,所述的第二伺服电机的输出端与第二丝杆的一端固定连接,所述的第二丝杆与第二滑板的底部螺纹连接以通过第二伺服电机驱动第二滑板在第二导轨上进行位移。
9.作为优选,所述的第三伺服驱动组件包括一第三伺服电机和一第一减速器,所述的第三伺服电机的输出端与第一减速器相连接,所述的第一减速器用于驱动安装架以z轴为轴心做旋转运动。
10.作为优选,所述的第四伺服驱动组件包括一第四伺服电机和一第三丝杆,所述的第四伺服驱动电机的输出端与第三丝杆固定连接,所述的第三滑板上设有第二凸块,所述的第三丝杆与第二凸块螺纹连接。
11.作为优选,所述的第五伺服驱动组件包括一第五伺服电机和一第二减速器,所述的第五伺服电机的输出端与第二减速器相连接,所述的第二减速器的输出轴沿着朝向工作平台组件的方向穿过第三滑板,并与第一安装块靠近第三滑板的一端固定连接。
12.作为优选,所述的第一安装块靠近工作平台组件的一端与第二安装块远离工作平台组件的一端通过轴杆铰链连接,所述的第二安装块远离工作平台组件的一端与轴杆固定连接。
13.作为优选,所述的第六伺服驱动组件包括一第六伺服电机和一第三减速器,所述的第六伺服电机的输出端与第三减速器相连接,所述的第三减速器的输出端与轴杆固定连接。
14.作为优选,所述的机架的一侧设有plc控制箱,所述的第一伺服驱动组件、第二伺服驱动组件、第三伺服驱动组件、第四伺服驱动组件、第五伺服驱动组件和第六伺服驱动组件均与plc控制箱电连接。
15.作为优选,所述的夹持头上设有两个夹紧油缸。
16.采用以上结构后,本发明与现有技术相比,具有以下的优点:第一伺服驱动组件、第二伺服驱动组件、第三伺服驱动组件、第四伺服驱动组件、第五伺服驱动组件和第六伺服驱动组件均采用伺服电机作为动力,提高了设备的动作精度和动作稳定性,从而提高了产品拉弯成型时的产品精度和稳定性,通过使用伺服电机代替传统的油泵电机和油缸,规避掉了很多设备漏油部位,改善了设备工作环境,使用起来更加环保,更加的节能,同时减少了噪音污染;通过伺服电机代替传统的锁紧气缸,杜绝了这一动作引起的设备冲击和振动,使这一动作精度得到极大的提高,减少了后期设备的维护频率,降低了使用成本;通过第一伺服驱动组件、第二伺服驱动组件、第三伺服驱动组件、第四伺服驱动组件、第五伺服驱动组件和第六伺服驱动组件的运动动作相互配合,这样,可以让产品角度的成型可以更顺滑流畅,得到合格的产品表面和角度,同时各动作的位置参数均可以通过触摸屏进行方便的输入输出,替代了传统移动接近开关的方式,加上plc和存储器的一起工作,调试参数的保存记录非常方便,在很大程度上提高了设备的易用性和通用性;通过在底板与工作平台之
间举模器设置,使得在换模时可以根据情况,决定底板与工作台板是接触还是分离,减轻了换模人员的工作强度,使更换模具更加简便和轻松。
附图说明
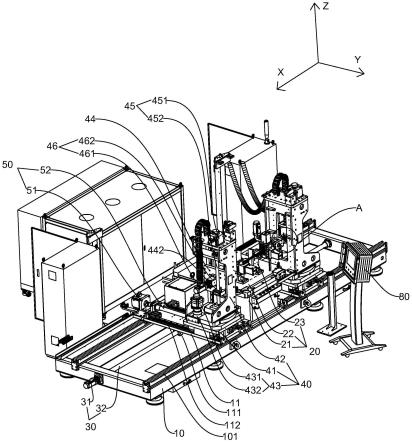
17.图1为本发明的结构示意图;
18.图2为图1中a处的局部放大图;
19.图3为图1的俯视图;
20.图4为图3中b处的局部放大图;
21.图5为图1的正视图。
具体实施方式
22.下面结合附图和具体实施方式对本发明作进一步详细地说明。
23.由图1至图5所示一种12轴全电伺服拉弯机,其特征在于,包括一机架10和一工作平台组件20,所述机架10的两侧对称设有两个第一滑板11和两个第一伺服驱动组件30,所述的两个第一伺服驱动组件30分别用于驱动两个第一滑板11沿x轴水平方向运动,所述的工作平台组件20设置在两个第一滑板11之间,每个第一滑板11上均设有一安装架组件40和一第二伺服驱动组件50,所述的安装架组件40包括一第二滑板41、一安装架42和一第三伺服驱动组件43,所述的第二伺服驱动组件50用于驱动第二滑板41沿y轴水平方向运动,所述的安装架42与第二滑板41转动连接,所述的第三伺服驱动组件43用于驱动安装架42以z轴为轴心做旋转运动,所述的安装架42上设有一第三滑板44和一第四伺服驱动组件45,所述的第三滑板44与安装架42滑动连接,所述的第四伺服驱动组件45用于驱动第三滑板44沿着z轴水平方向运动,所述的第三滑板44靠近工作平台组件20的一侧转动连接有一第一安装块441,所述的第三滑板44远离工作平台组件20的一侧设有一用于驱动第一安装块441以x轴为轴心做旋转运动的第五伺服驱动组件46,所述的第一安装块441靠近工作平台组件20的一侧铰链连接有一第二安装块60,所述的第一安装块441的一侧设有用于驱动第二安装块60以y轴为轴心做旋转运动的第六伺服驱动组件61,所述的第二安装块60靠近工作平台组件20的一侧设有一夹持头70,两个夹持头70分别用于夹持放置在工作平台组件20上的物料的两端,这样,可以通过第一伺服驱动组件30带动夹持头70沿着沿x轴水平方向运动,通过第二伺服驱动组件50带动夹持头70沿y轴水平方向运动,通过第三伺服驱动组件43带动夹持头70以z轴为轴心做旋转运动,通过第四伺服驱动组件45带动夹持头70沿z轴水平方向运动,通过第五伺服驱动组件46带动夹持头70以x轴为轴心做旋转运动,通过第六伺服驱动组件61带动夹持头70以y轴为轴心做旋转运动,从而使得在对物料进行拉弯时,各部位协调运动,相互配合,在拉弯过程中让产品角度的成型可以更顺滑流畅,得到合格的产品表面和角度,最终通过拉弯模具生产出合格的产品。
24.所述的工作平台组件20包括一工作平台21、一底板22和至少一个支架23,所述的底板22安装在工作平台21上,所述的工作平台21上设有举模器211,所述的举模器211设置在底板22与工作平台21之间,所述的支架23竖直设置在底板22的上端面,支架23用于放置物料,这样,可以在进行换模时根据情况,决定底板22与工作平台21是接触还是分离。
25.所述的机架10的两侧对称设有第一导轨101,所述的两个第一滑板11的底部分别
与两个第一导轨101滑动连接。
26.所述的每个第一伺服驱动组件30均包括一第一伺服电机31和一第一丝杆32,所述的第一伺服电机31的输出端与第一丝杆32的一端固定连接,所述的第一滑板11的底部设有第一凸块111,所述的第一丝杆32与第一凸块111螺纹连接,第一丝杆32是沿着x轴水平方向延伸的,通过第一伺服电机31带动第一丝杆32转动,使得与第一丝杆32螺纹连接的第一凸块111沿着第一丝杆32进行位移,从而带动第一滑板11进行位移。
27.每个第一滑板11的顶部均设有第二导轨112,所述的第二滑板41的底部与第二导轨112滑动连接,所述的第二伺服驱动组件50包括一第二伺服电机51和一第二丝杆52,所述的第二伺服电机51的输出端与第二丝杆52的一端固定连接,所述的第二丝杆52与第二滑板41的底部螺纹连接以通过第二伺服电机驱动第二滑板41在第二导轨112上进行位移,第二丝杆52是沿着y轴水平方向延伸的,通过第二伺服电机51带动第二丝杆52转动,使得第二滑板41沿着y轴水平方向运动。
28.所述的第三伺服驱动组件43包括一第三伺服电机431和一第一减速器432,所述的第三伺服电机431的输出端与第一减速器432相连接,所述的第一减速器432用于驱动安装架42以z轴为轴心做旋转运动。
29.所述的第四伺服驱动组件45包括一第四伺服电机451和一第三丝杆452,所述的第四伺服驱动电机451的输出端与第三丝杆452固定连接,所述的第三滑板44上设有第二凸块442,所述的第三丝杆452与第二凸块442螺纹连接,第三丝杆452是沿着z轴水平方向延伸的,第四伺服电机451带动第三丝杆452旋转,使得第三滑板44沿着z轴水平方向运动。
30.所述的第五伺服驱动组件46包括一第五伺服电机461和一第二减速器462,所述的第五伺服电机461的输出端与第二减速器462相连接,所述的第二减速器462的输出轴4621沿着朝向工作平台组件20的方向穿过第三滑板44,并与第一安装块441靠近第三滑板44的一端固定连接。
31.所述的第一安装块441靠近工作平台组件20的一端与第二安装块60远离工作平台组件20的一端通过轴杆601铰链连接,所述的第二安装块60远离工作平台组件20的一端与轴杆601固定连接。
32.所述的第六伺服驱动组件61包括一第六伺服电机611和一第三减速器612,所述的第六伺服电机611的输出端与第三减速器612相连接,所述的第三减速器612的输出端与轴杆601固定连接,这样,可以通过驱动轴杆601转动,使得夹持头70以y轴为轴心做旋转运动。
33.所述的机架10的一侧设有plc控制箱80,所述的第一伺服驱动组件30、第二伺服驱动组件50、第三伺服驱动组件43、第四伺服驱动组件45、第五伺服驱动组件46和第六伺服驱动组件61均与plc控制箱80电连接,这样,可以通过plc控制箱80控制使各部位协调运动,相互配合,提高设备动作精度和动作稳定性。
34.所述的夹持头70上设有两个夹紧油缸71。
35.需要说明的是,12轴全电伺服拉弯机,在工作时,将物料放置在支架23上,夹持头70夹持物料的两端,通过两个第一伺服驱动组件30同时向背离的方向运动,使得夹持头70同时向背离的方向运动,并且牵引物料达到物料材料的屈服强度,此时物料会贴紧拉弯摸具模块型腔,然后两个第一滑板11上的第二伺服驱动组件50和第四伺服驱动组件45带动夹持头70向y轴水平方向运动和向z轴水平方向运动,根据产品两侧弧度不同,通过plc控制箱
80控制各部件的运动位置和运动速度,并在第二伺服驱动组件50和第四伺服驱动组件45带动夹持头70运动的同时,通过第三伺服驱动组件43带动夹持头70以z轴为轴心做旋转运动,并且第三伺服驱动组件43会根据第二伺服驱动组件50和第四伺服驱动组件45的运动速度和运动位置来调节夹持头70的旋转角度,从而将物料达到产品成型的基本形状,此时,两个第六伺服驱动组件61带动夹持头70以y轴为轴心做旋转运动对第三伺服驱动组件43带动夹持头70的旋转角度做出相应的补偿,使得产品角度的成型可以更顺滑流畅,得到合格的产品表面和角度,通过两个第五伺服驱动组件46带动夹持头70以x轴为轴心做旋转运动,使得通过伺服电机的输出动力让夹头以不同的速度和位置来扭转产品,使产品任意位置的任一断面尺寸达到图纸要求,以上所有动作需要的的参数均可以通过触摸屏进行设置,整个运动过程的控制通过plc进行,使各部位协调运动,相互配合,最终通过拉弯模具生产出合格的产品。
36.以上仅就本发明应用较佳的实例做出了说明,但不能理解为是对权利要求的限制,本发明的结构可以有其他变化,不局限于上述结构。总之,凡在本发明的独立权利要求的保护范围内所作的各种变化均在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1