一种用于合成闸瓦钢背抓取运输的电磁吸附机械手的制作方法
1.本实用新型涉及机械加工技术领域,尤其涉及一种用于合成闸瓦钢背抓取运输的电磁吸附机械手。
背景技术:
2.合成闸瓦由钢背和摩擦体两部分构成,其中钢背冲压是闸瓦制作的一个主要工序。目前钢背的冲压均需人工将金属块抓取放到冲压床上进行冲压,其过程简单、重复、且具有规律性,长时间站立重复同样的工作会让人疲倦,使其效率低下,极易造成安全事故。
3.通过设置带有抽气吸盘的机械手臂,使用机械手臂对金属块进行抓取,在提高生产效率的同时,从根本上消除安全隐患,从而保障工人的生命财产安全。
4.但使用上述带有抽气吸盘的机械手臂在恶劣的环境下抓取钢背,其吸附效果不佳,稳定性较差,工作寿命短。
技术实现要素:
5.本实用新型的目的在于提供一种用于合成闸瓦钢背抓取运输的电磁吸附机械手,旨在解决现有技术中的在抓取合成闸瓦钢背的过程中,吸附效果不佳,从而影响稳定性的技术问题。
6.为实现上述目的,本实用新型采用的一种用于合成闸瓦钢背抓取运输的电磁吸附机械手,包括连接臂模块、左右缓冲模块、前后缓冲模块和钢背抓取模块,所述左右缓冲模块设置于所述连接臂模块的上方,所述前后缓冲模块设置于所述左右缓冲模块的上方,所述钢背抓取模块设置于所述前后缓冲模块的上方;
7.所述连接臂模块包括基板、连接板和继电器pcb板,所述连接板与所述基板固定连接,并位于所述左右缓冲模块的下方,所述继电器pcb板与所述连接板固定连接,并位于所述连接板的上方。
8.其中,所述左右缓冲模块包括横轴基板、第一光轴支撑座、第一轴承、第一光轴、第一固定环、第一弹簧和第一接近传感器,所述第一光轴支撑座设置于所述基板的外侧壁,所述第一光轴贯穿所述第一光轴支撑座,并依次与所述第一弹簧、所述第一固定环和所述第一轴承同轴心配合,所述第一固定环的一端与所述第一弹簧固定连接,所述第一固定环的另一端与所述第一轴承相贴合,所述第一轴承的上表面与所述横轴基板的下表面相配合,所述第一接近传感器设置于所述横轴基板的外侧壁。
9.其中,所述前后缓冲模块包括第二光轴支撑座、第二光轴、第二轴承、第二固定环和第二弹簧,所述第二光轴支撑座设置于所述横轴基板的外侧壁,所述第二光轴贯穿所述第二光轴支撑座,并依次与所述第二弹簧、所述第二固定环和所述第二轴承同轴心配合,所述第二固定环的一端与所述第二弹簧固定连接,所述第二固定环的另一端与所述第二轴承相贴合。
10.其中,所述前后缓冲模块还包括钢背缓冲板和第二接近传感器,所述钢背缓冲板
设置于所述第二轴承的下方,且所述第二光轴分别贯穿所述第二光轴支撑座和钢背缓冲板,所述第二接近传感器设置于所述钢背缓冲板的外侧壁。
11.其中,所述钢背抓取模块包括电磁铁背板、法兰、第一平垫片、第三弹簧、第二平垫片、第三固定环、轴肩螺丝、第三接近传感器和电磁铁,所述轴肩螺丝分别贯穿所述电磁铁背板和所述钢背缓冲板,并依次与所述法兰、所述第一平垫片、所述第三弹簧、所述第二平垫片和所述第三固定环轴心配合,所述第三固定环的上表面与所述第二平垫片的下表面相贴合,所述第三固定环的下表面与所述钢背缓冲板的上表面相贴合,所述第三弹簧的一端与所述第二平垫片的上表面相贴合,所述第三弹簧的另一端与所述第一平垫片的下表面相贴合,所述法兰的下表面与所述第一平垫片的上表面相贴合,所述法兰的上表面与所述电磁铁背板的下表面相贴合,所述电磁铁的下表面与所述电磁铁背板的上表面相贴合,所述电磁铁背板的外侧壁设置有所述第三接近传感器。
12.其中,所述继电器pcb板包括pcb板、继电器和接线端子,所述pcb板与所述连接板固定连接,并位于所述连接板的外侧壁,所述继电器和所述接线端子分别设置于所述pcb板的外侧壁。
13.本实用新型的一种用于合成闸瓦钢背抓取运输的电磁吸附机械手,所述连接板与所述基板都为u型钢板,所述连接板倒扣于所述基板中,通过两侧通孔固定,所述连接板左端设有安装孔,用于将所述连接板固定在所述基板上,右端留有通孔,用于所述继电器pcb板的安装,所述钢背抓取模块用于抓取合成闸瓦钢背,所述左右缓冲模块和所述前后缓冲模块在抓取过程中起缓冲效果,实现了提高在抓取合成闸瓦钢背的过程中的吸附效果,从而提高稳定性。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
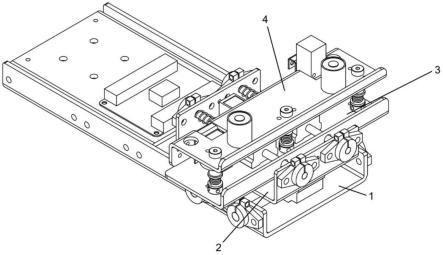
15.图1是本实用新型的用于合成闸瓦钢背抓取运输的电磁吸附机械手的结构示意图。
16.图2是本实用新型的连接臂模块的结构示意图。
17.图3是本实用新型的继电器pcb板的结构示意图。
18.图4是本实用新型的左右缓冲模块的从上至下的结构示意图。
19.图5是本实用新型的左右缓冲模块的从下至上的结构示意图。
20.图6是本实用新型的前后缓冲模块的结构示意图。
21.图7是本实用新型的钢背抓取模块的从上至下的结构示意图。
22.图8是本实用新型的钢背抓取模块的从下至上的结构示意图。
23.1-连接臂模块、2-左右缓冲模块、3-前后缓冲模块、4-钢背抓取模块、5-基板、6-连接板、7-继电器pcb板、8-pcb板、9-继电器、10-接线端子、11-横轴基板、12-第一光轴支撑座、13-第一轴承、14-第一光轴、15-第一固定环、16
‑ꢀ
第一弹簧、17-第一接近传感器、18-第二光轴支撑座、19-第二光轴、20-第二轴承、21-第二固定环、22-第二弹簧、23-第二接近传
感器、24-钢背缓冲板、25
‑ꢀ
电磁铁背板、26-法兰、27-第一平垫片、28-第三弹簧、29-第二平垫片、30-第三固定环、31-轴肩螺丝、32-第三接近传感器、33-第一传感器安装支架、34-第四接近传感器、35-第二传感器安装支架、36-电磁铁。
具体实施方式
24.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
25.在本实用新型的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
26.请参阅图1至图8,其中图1是用于合成闸瓦钢背抓取运输的电磁吸附机械手的结构示意图,图2是连接臂模块的结构示意图,图3是继电器pcb板的结构示意图,图4是左右缓冲模块的从上至下的结构示意图,图5是左右缓冲模块的从下至上的结构示意图,图6是前后缓冲模块的结构示意图,图7是钢背抓取模块的从上至下的结构示意图,图8是钢背抓取模块的从下至上的结构示意图,本实用新型提供了一种用于合成闸瓦钢背抓取运输的电磁吸附机械手,包括连接臂模块1、左右缓冲模块2、前后缓冲模块3和钢背抓取模块4,所述左右缓冲模块2设置于所述连接臂模块1的上方,所述前后缓冲模块3设置于所述左右缓冲模块2的上方,所述钢背抓取模块4设置于所述前后缓冲模块3 的上方;
27.所述连接臂模块1包括基板5、连接板6和继电器pcb板7,所述连接板6 与所述基板5固定连接,并位于所述左右缓冲模块2的下方,所述继电器pcb 板7与所述连接板6固定连接,并位于所述连接板6的上方。
28.在本实施方式中,所述连接板6与所述基板5都为u型钢板,所述连接板 6倒扣于所述基板5中,通过两侧通孔固定,所述连接板6左端设有安装孔,用于将所述连接板6固定在所述基板5上,右端留有通孔,用于所述继电器pcb 板7的安装,所述钢背抓取模块4用于抓取合成闸瓦钢背,所述左右缓冲模块2 和所述前后缓冲模块3在抓取过程中起缓冲效果,实现了提高在抓取合成闸瓦钢背的过程中的吸附效果,从而提高稳定性。
29.进一步地,所述左右缓冲模块2包括横轴基板11、第一光轴支撑座12、第一轴承13、第一光轴14、第一固定环15、第一弹簧16和第一接近传感器17,所述第一光轴支撑座12设置于所述基板5的外侧壁,所述第一光轴14贯穿所述第一光轴支撑座12,并依次与所述第一弹簧16、所述第一固定环15和所述第一轴承13同轴心配合,所述第一固定环15的一端与所述第一弹簧16固定连接,所述第一固定环15的另一端与所述第一轴承13相贴合,所述第一轴承13 的上表面与所述横轴基板11的下表面相配合,所述第一接近传感器17设置于所述横轴基板11的外侧壁。
30.在本实施方式中,当所述横轴基板11受到向右方向力时,所述第一弹簧16 将被压
缩,所述左右缓冲模块2带动所述前后缓冲模块3和所述钢背抓取模块4 向右移动,所述第一接近传感器17安装于所述横轴基板11的下表面,当所述横轴基板11受力向右移动,所述第一接近传感器17感应所述基板5时,所述第一接近传感器17的指示灯变亮同时给机械臂主机发送信号,从而调节所述钢背抓取模块4的运动轨迹。
31.进一步地,所述前后缓冲模块3包括第二光轴支撑座18、第二光轴19、第二轴承20、第二固定环21和第二弹簧22,所述第二光轴支撑座18设置于所述横轴基板11的外侧壁,所述第二光轴19贯穿所述第二光轴支撑座18,并依次与所述第二弹簧22、所述第二固定环21和所述第二轴承20同轴心配合,所述第二固定环21的一端与所述第二弹簧22固定连接,所述第二固定环21的另一端与所述第二轴承20相贴合。
32.进一步地,所述前后缓冲模块3还包括钢背缓冲板24和第二接近传感器23,所述钢背缓冲板24设置于所述第二轴承20的下方,且所述第二光轴19分别贯穿所述第二光轴支撑座18和钢背缓冲板24,所述第二接近传感器23设置于所述钢背缓冲板24的外侧壁。
33.在本实施方式中,当所述钢背缓冲板24受到向后的力时,所述第二弹簧22 将被压缩,所述前后缓冲模块3带动所述钢背抓取模块4向后移动,当所述第二接近传感器23感应所述横轴基板11时,所述第二接近传感器23的指示灯变亮同时给机械臂主机发送信号,从而调节所述钢背抓取模块4的运动轨迹。
34.进一步地,所述钢背抓取模块4包括电磁铁背板25、法兰26、第一平垫片 27、第三弹簧28、第二平垫片29、第三固定环30、轴肩螺丝31、第三接近传感器32和电磁铁36,所述轴肩螺丝31分别贯穿所述电磁铁背板25和所述钢背缓冲板24,并依次与所述法兰26、所述第一平垫片27、所述第三弹簧28、所述第二平垫片29和所述第三固定环30轴心配合,所述第三固定环30的上表面与所述第二平垫片29的下表面相贴合,所述第三固定环30的下表面与所述钢背缓冲板24的上表面相贴合,所述第三弹簧28的一端与所述第二平垫片29的上表面相贴合,所述第三弹簧28的另一端与所述第一平垫片27的下表面相贴合,所述法兰26的下表面与所述第一平垫片27的上表面相贴合,所述法兰26 的上表面与所述电磁铁背板25的下表面相贴合,所述电磁铁36的下表面与所述电磁铁背板25的上表面相贴合,所述电磁铁背板25的外侧壁设置有所述第三接近传感器32。
35.在本实施方式中,当所述电磁铁36受到向下的力时,所述第三弹簧28被压缩,所述电磁铁背板25向下移动,当所述第三接近传感器32感应到所述钢背缓冲板24时,所述第三接近传感器32的指示灯变亮同时给机械臂主机发送信号,从而调节所述钢背抓取模块4的运动轨迹;在使用所述用于合成闸瓦钢背抓取运输的电磁吸附机械手对合成闸瓦钢背进行抓取的过程中,机械臂主机控制所述钢背抓取模块4移动至待取钢背的正上方,并垂直下降,所述第四接近传感器34的指示灯变亮,说明有钢背存在,继续向下移动,所述第三接近传感器32指示灯变亮,说明所述电磁铁36已触碰到钢背,主机控制所述继电器9 断开所述电磁铁36的电源,所述电磁铁36吸附钢背,所述钢背抓取模块4垂直上升至示教点,抓取过程结束;抓取钢背后,机械臂主机控制所述钢背抓取模块4移动至冲压机床的正上方示教点,控制所述钢背抓取模块4左移,当钢背触碰到冲压床左挡块时,所述左右缓冲模块2中的第一弹簧16被压缩,继续左移,当所述第一接近传感器17感应到信号时,指示灯变亮同时给机械臂主机发送信号,控制所述钢背抓取模块4前移,当钢背触碰到冲压床前挡块时,所述前后缓冲模块3中的所述第二弹簧22被压缩,继续前移,当所述第二接近传感器23感应到信
号时,指示灯变亮同时给机械臂主机发送信号,控制所述钢背抓取模块4下移,当钢背触碰到冲压床时,所述钢背抓取模块4中的所述第三弹簧28被压缩,继续下移,当所述第三接近传感器32感应到信号时,指示灯变亮同时给机械臂主机发送信号,主机控制所述继电器9接通所述电磁铁36的电源,所述电磁铁36释放钢背,钢背释放结束,期间,所述第四接近传感器34 用于检测钢背是否掉落,待所述钢背抓取模块4移动到冲压床外示教点,主机控制机床冲压,冲压结束,重复上述过程,即可实现钢背冲压自动化。
36.进一步地,所述继电器pcb板7包括pcb板8、继电器9和接线端子10,所述pcb板8与所述连接板6固定连接,并位于所述连接板6的外侧壁,所述继电器9和所述接线端子10分别设置于所述pcb板8的外侧壁。
37.在本实施方式中,所述pcb板8的螺丝孔与所述连接板6上的安装孔配合,所述继电器9与所述接线端子10通过所述pcb板8预留孔,将其焊接在所述 pcb板8上。
38.进一步地,所述用于合成闸瓦钢背抓取运输的电磁吸附机械手还包括第一传感器安装支架33和第四接近传感器34,所述第一传感器安装支架33与所述电磁铁背板25固定连接,并位于所述电磁铁背板25的外侧壁,所述第四接近传感器34与所述第一传感器安装支架33固定连接。
39.在本实施方式中,所述第四接近传感器34安装在所述第一传感器安装支架 33上,所述第四接近传感器34的感应面朝上方,可根据需要调节相应位置。
40.进一步地,所述用于合成闸瓦钢背抓取运输的电磁吸附机械手还包括第二传感器安装支架35,所述第二传感器安装支架35与所述电磁铁背板25固定连接,并位于所述电磁铁背板25的外侧壁,所述第三接近传感器32与所述第二传感器安装支架35固定连接。
41.在本实施方式中,所述第三接近传感器32安装在所述第二传感器安装支架 35上,所述第二接近传感器23的感应面朝下方,可根据需要调节相应位置。
42.以上所揭露的仅为本实用新型一种较佳实施例而已,当然不能以此来限定本实用新型之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本实用新型权利要求所作的等同变化,仍属于实用新型所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1