一种石油钻杆耐磨带全自动堆焊装置的制作方法
1.本实用新型涉及金属废料处理技术领域,尤其涉及一种石油钻杆耐磨带全自动堆焊装置。
背景技术:
2.石油钻杆作为需重复利用的钻井工具之一,其在地下的旋转摩擦会对管壁造成极大磨损同时降低其使用寿命。为增加其使用寿命通常在钻杆最大直径环面堆焊一定宽度的耐磨合金材料,通过一次次堆焊修复该耐磨带从而增加钻杆的循环使用次数,确保钻杆的使用寿命,降低石油钻探成本。
3.石油钻杆使用场所一般野外,其现场环境条件较差。早期石油钻杆耐磨带采用人工焊接或简易自动焊接装置实现其环面堆焊,其焊接效率低,现场操作环境恶劣,同时,焊接过程中易造成焊接缺陷且发现较晚,从而影响钻杆使用寿命。
技术实现要素:
4.基于以上问题,本发明提供了一种石油钻杆耐磨带全自动堆焊装置,采用集装箱模块化设计可方便野外作业使用;同时采用自动化和实时监测手段可实现无人化或远程操作监控方式实现石油钻杆耐磨带的自动堆焊,可大大提高焊接效率和焊接质量。
5.为解决以上技术问题,本发明采用的技术方案如下:
6.一种石油钻杆耐磨带全自动堆焊装置,包括全自动焊接主机,所述全自动焊接主机可实现对石油钻杆的全自动堆焊,所述全自焊接主机内部设置有用于将石油钻杆输送至焊接结构内进行焊接的自动输送装置,所述自动输送装置可实现石油钻杆自动进出全自动焊接主机且在焊接过程中实现对石油钻杆的辅助支撑,所述自动输送装置的出料口处设置有用于承载石油钻杆的上、下料架装置,所述上、下料架装置可实现对待焊接的石油钻杆以及已焊接的石油钻杆进行暂时存储,采用集装箱模块化设计可方便野外作业使用;同时采用自动化和实时监测手段可实现无人化或远程操作监控方式实现石油钻杆耐磨带的自动堆焊,可大大提高焊接效率和焊接质量。
7.进一步地,所述全自动焊接主机内部设置用于在石油钻杆焊接时进行夹持的焊接主轴箱装置,所述焊接主轴箱内部设置有主要轴箱,所述主要轴箱底端一侧设置有配套使用的回转驱动系统,所述主要轴箱底端远离回转驱动系统一端设置有用于卡接钻杆的卡盘驱动系统,所述主要轴箱一侧侧壁固定连接有用于监视焊接情况的焊接过程视觉监测系统,所述主要轴箱顶端表面中心设置有用于结合回转驱动系统和卡盘驱动系统联动的夹持回转机构,所述焊接主轴箱装置旁设置有用于对石油钻杆进行焊接的焊接机器人系统,所述焊接机器人系统底端为固定在地面形成稳定姿势的机器人支撑底座,所述机器人支撑底座上方为可广角移动和转动的六轴焊接机器人,所述六轴焊接机器人靠近焊接主轴箱装置一侧延伸有用于对石油钻杆进行焊接的机器人自动焊枪,所述焊接主轴箱装置远离焊接机器人系统一旁设置有用于人工控制的现场操作盒,所述现场操作盒内部通过顶端可延伸拉
动的可旋转支撑吊架固定在全自动焊接主机内部顶端,所述可旋转支撑吊架底端固定连接有用于人工操作的操作面板,所述全自动焊接主机包括可移动集装箱,所述可移动集装箱上设有现场操作室、全密封自动焊接室、配套设备固定放置室等,所述焊接机器人旁设置有用于净化焊接时产生的刺激性气体的烟尘净化系统,所述全自动焊接主机内部一侧侧壁居中处设置有用于控制全自动焊接主机内结构的主控柜,所述焊接主轴箱装置旁设置有与之相配合使用的送丝机装置,所述送丝机装置底端电性连接于焊接电源的电力输出端,所述焊接电源旁设置有焊接循环冷却水箱,所述全自动焊接主机内部设置有用于监视集装箱内部的现场监控摄像头,该主机可实现石油钻杆的全自动堆焊和实时监控和检测。焊接主轴箱装置设置电动卡盘系统和主轴回转系统,电动卡盘系统通过电机驱动实现石油钻杆的夹紧与松开,主轴回转系统实现石油钻杆的焊接回转驱动。机器人自动焊接系统包括多轴机器人系统和焊接系统,机器人系统实现焊枪的操作与摆动,焊接系统则实现耐磨合金焊丝在钻杆环面的堆焊。
8.进一步地,所述自动输送装置的两端及居中处分别设置有多个布置在全自动焊接主机主轴方向的输送托架,用以实现石油钻杆轴向进出输送,所述输送托架设置有用于调节石油钻杆输送高度的第一升降驱动系统,所述第一升降驱动系统顶端一侧固定连接有用于输送石油钻杆的输送驱动系统,所述输送驱动系统顶端表面贯通连接有用于检测运输状态的检测传感装置;所述位于自动输送装置居中处设置的输送托架的主轴方向两侧分别设置有用于在石油钻杆焊接过程中可实现对其的辅助支撑的支撑托架,所述支撑托架顶端活动连接有万向球支撑组件,支撑托架底端为调整支撑托架高度位置的第二升降驱动系统,所述自动输送装置内设置有贯穿于输送托架和支撑托架内部的自动上下料翻转机构,所述自动上下料翻转机构设置有固定支架贯穿于支撑托架和输送托架内部,所述固定支架一侧设置有用于上下料翻转的液压联杆驱动组件,所述支撑托架、输送托架和上下料反转机构底端固定连接于固定支撑底座顶端表面,支撑托架固定在底座上,一般采用单套或两套布置,其采用电动升降设计,当钻杆焊接时其可起到辅助支撑作用。上下料翻转机构按两套设计,分别固定在底座两端,两机构采用连杆连接且通过液压缸驱动实现同步翻转动作,该机构主要实现将上料架上的钻杆传送到输送托架上,同时将输送托架上的钻杆传送到下料架上。
9.进一步地,所述自动输送装置的下料口处连接有上、下料架装置,所述上、下料架装置内设置有用于石油钻杆焊接前、后的暂时存储的暂存料架支撑模块,同时实现石油钻杆在重力作用下的自动传送,所述暂存料架支撑模块贴近自动输送装置一侧顶端设置有用于复检石油钻杆状态的传感检测装置,上、下料架装置设置在自动输送装置两端,采用独立模块设计且通过膨胀螺栓固定在地面上,料架两端支撑高度独立可调,其可实现与翻转机构传送高度匹配同时形成料架前后高度差以方便钻杆在自重作用下滚动到暂存支撑位。
10.与现有技术相比,本实用新型具有如下有益效果:
11.1.本实用新型可实现石油钻杆从进料到出料的全自动运行,可实现无人自劝操作或或人员在办公区远程操作,大大降低了人员的劳动强度、改善了操作环境;
12.2.本实用新型通过视觉检测对钻杆焊接质量进行实时监控,可有效保证焊接质量,并在出现质量问题时自动停机并第一时间发出报警信号;
13.3.本实用新型在上料架和下料架上分别设置有两组检测传感器,对石油钻杆到位
状态实行双重冗余检测,确保石油钻杆到位准确无误,从而保证动作过程的安全;
14.4.本实用新型在自动输送装置升降到位以及石油钻杆到位检测传感器,可确保石油钻杆上下传送准确可靠;
15.5.本实用新型设置有现场及远程两套控制系统,操作人员可现场操作也可远程控制,同时通过现场监控摄像头对现场状态实时监控;
16.6.本实用新型可通过数据库对所有运行参数以及完工状态等永久保存,可方便随时查看。
附图说明
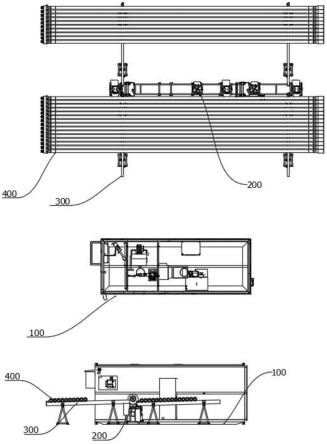
17.图1为本实用新型的一种石油钻杆耐磨带全自动堆焊装置的整体布局示意图。
18.图2为本实用新型的一种石油钻杆耐磨带全自动堆焊装置的全自动焊接主机结构示意图。
19.图3为本实用新型的一种石油钻杆耐磨带全自动堆焊装置的机器人自动焊接系统结构示意图。
20.图4为本实用新型的一种石油钻杆耐磨带全自动堆焊装置的焊接主轴箱装置结构示意图。
21.图5为本实用新型的一种石油钻杆耐磨带全自动堆焊装置的现场操作盒结构示意图。
22.图6为本实用新型的一种石油钻杆耐磨带全自动堆焊装置的自动输送装置结构示意图。
23.图7为本实用新型的一种石油钻杆耐磨带全自动堆焊装置的输送托架结构示意图。
24.图8为本实用新型的一种石油钻杆耐磨带全自动堆焊装置的支撑托架结构示意图。
25.图9为本实用新型的一种石油钻杆耐磨带全自动堆焊装置的上下料翻转机构示意图。
26.图10为本实用新型的一种石油钻杆耐磨带全自动堆焊装置的料架装置结构示意图。
27.图中:100、全自动焊接主机;101、现场监控摄像头;110、焊接主轴箱装置;111、主要轴箱;112、回转驱动系统;113、卡盘驱动系统;114、焊接过程视觉监测系统;115、夹持回转机构;120、焊接机器人系统;121、机器人自动焊枪;122、六轴焊接机器人;123、机器人支撑底座;130、现场操作盒;131、可旋转支撑吊架;132、操作面板;140、烟尘净化系统;150、主控柜;160、送丝机装置;170、焊接电源;180、焊接循环冷却水箱;190、可移动集装箱;200、自动输送装置;210、固定支撑底座;220、输送托架;221、第一升降驱动系统;222、输送驱动系统;223、检测传感装置;230、自动上下料翻转机构;231、固定支架;232、液压联杆驱动组件;240、支撑托架;241、万向球支撑组件;242、第二升降驱动系统;300、上、下料架装置;310、暂存料架支撑模块;320、传感检测装置;400、石油钻杆。
具体实施方式
28.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
29.如图1-图10所示,一种石油钻杆耐磨带全自动堆焊装置,包括全自动焊接主机100,所述全自动焊接主机100可实现对石油钻杆400的全自动堆焊,所述全自动焊接主机100内部设置有用于将石油钻杆400输送至焊接结构内进行焊接的自动输送装置200,所述自动输送装置200可实现石油钻杆400自动进出全自动焊接主机100且在焊接过程中实现对石油钻杆400的辅助支撑,所述自动输送装置200的出料口处设置有用于承载石油钻杆400的上、下料架装置300,所述上、下料架装置300可实现对待焊接的石油钻杆400以及已焊接的石油钻杆400进行暂时存储,采用集装箱模块化设计可方便野外作业使用;同时采用自动化和实时监测手段可实现无人化或远程操作监控方式实现石油钻杆400耐磨带的自动堆焊,可大大提高焊接效率和焊接质量。
30.如图1-图5所述,所述全自动焊接主机100内部设置用于在石油钻杆400焊接时进行夹持的焊接主轴箱装置110,所述焊接主轴箱内部设置有主要轴箱111,所述主要轴箱111底端一侧设置有配套使用的回转驱动系统112,所述主要轴箱111底端远离回转驱动系统112一端设置有用于卡接钻杆的卡盘驱动系统113,所述主要轴箱111一侧侧壁固定连接有用于监视焊接情况的焊接过程视觉监测系统114,所述主要轴箱111顶端表面中心设置有用于结合回转驱动系统112和卡盘驱动系统113联动的夹持回转机构115,所述焊接主轴箱装置110旁设置有用于对石油钻杆400进行焊接的焊接机器人系统120,所述焊接机器人系统120底端为固定在地面形成稳定姿势的机器人支撑底座123,所述机器人支撑底座123上方为可广角移动和转动的六轴焊接机器人122,所述六轴焊接机器人122靠近焊接主轴箱装置110一侧延伸有用于对石油钻杆400进行焊接的机器人自动焊枪121,所述焊接主轴箱装置110远离焊接机器人系统120一旁设置有用于人工控制的现场操作盒130,所述现场操作盒130内部通过顶端可延伸拉动的可旋转支撑吊架131固定在全自动焊接主机100内部顶端,所述可旋转支撑吊架131底端固定连接有用于人工操作的操作面板132,所述全自动焊接主机100包括可移动集装箱190,所述可移动集装箱190上设有现场操作室、全密封自动焊接室、配套设备固定放置室等,所述焊接机器人旁设置有用于净化焊接时产生的刺激性气体的烟尘净化系统140,所述全自动焊接主机100内部一侧侧壁居中处设置有用于控制全自动焊接主机100内结构的主控柜150,所述焊接主轴箱装置110旁设置有与之相配合使用的送丝机装置160,所述送丝机装置160底端电性连接于焊接电源170的电力输出端,所述焊接电源170旁设置有焊接循环冷却水箱180,所述全自动焊接主机100内部设置有用于监视集装箱内部的现场监控摄像头101,该主机可实现石油钻杆400的全自动堆焊和实时监控和检测。焊接主轴箱装置110设置电动卡盘系统和主轴回转系统,电动卡盘系统通过电机驱动实现石油钻杆400的夹紧与松开,主轴回转系统实现石油钻杆400的焊接回转驱动。机器人自动焊接系统包括多轴机器人系统和焊接系统,机器人系统实现焊枪的操作与摆动,焊接系统则实现耐磨合金焊丝在钻杆环面的堆焊。
31.如图1、图6、图7、图8和图9所示,所述自动输送装置200的两端及居中处分别设置有多个布置在全自动焊接主机100主轴方向的输送托架220,用以实现石油钻杆400轴向进出输送,所述输送托架220设置有用于调节石油钻杆400输送高度的第一升降驱动系统221,
所述第一升降驱动系统221顶端一侧固定连接有用于输送石油钻杆400的输送驱动系统222,所述输送驱动系统222顶端表面贯通连接有用于检测运输状态的检测传感装置223;所述位于自动输送装置200居中处设置的输送托架220的主轴方向两侧分别设置有用于在石油钻杆400焊接过程中可实现对其的辅助支撑的支撑托架240,所述支撑托架240顶端活动连接有万向球支撑组件241,支撑托架240底端为调整支撑托架240高度位置的第二升降驱动系统242,所述自动输送装置200内设置有贯穿于输送托架220和支撑托架240内部的自动上下料翻转机构230,所述自动上下料翻转机构230设置有固定支架231贯穿于支撑托架240和输送托架220内部,所述固定支架231一侧设置有用于上下料翻转的液压联杆驱动组件232,所述支撑托架240、输送托架220和上下料反转机构底端固定连接于固定支撑底座210顶端表面,支撑托架240固定在底座上,一般采用单套或两套布置,其采用电动升降设计,当钻杆焊接时其可起到辅助支撑作用。上下料翻转机构按两套设计,分别固定在底座两端,两机构采用连杆连接且通过液压缸驱动实现同步翻转动作,该机构主要实现将上料架上的钻杆传送到输送托架220上,同时将输送托架220上的钻杆传送到下料架上。
32.如图1和图10所示,所述自动输送装置200的下料口处连接有上、下料架装置300,所述上、下料架装置300内设置有用于石油钻杆400焊接前、后的暂时存储的暂存料架支撑模块310,同时实现石油钻杆400在重力作用下的自动传送,所述暂存料架支撑模块310贴近自动输送装置200一侧顶端设置有用于复检石油钻杆400状态的传感检测装置320,上、下料架装置300设置在自动输送装置200两端,采用独立模块设计且通过膨胀螺栓固定在地面上,料架两端支撑高度独立可调,其可实现与翻转机构传送高度匹配同时形成料架前后高度差以方便钻杆在自重作用下滚动到暂存支撑位。
33.本实用新型的不同装置在工作时:
34.上料:
35.自动物流线或叉车搬运将石油钻杆400传送到上、下料架上料端,石油钻杆400在重力作用下滚到紧靠自动输送装置200一端,该处的检测传感装置223将检测到石油钻杆400的到位信号传送给主控plc;物料上料准备完成,当完成焊接后,通过暂存料架支撑模块310来存放石油钻杆400,并通过上料端顶部设置的传感检测装置320对焊接后的石油钻杆400进行复检。
36.进料传送:
37.主控plc接收到检测传感装置223发送的物料检测信号后,主控系统随即向自动输送装置200发送上料指令,上下翻转机构在液压缸的驱动下翻转支承板将石油钻杆400传送到输送托架220上,当检测传感装置223检测到石油钻杆400到位信息后,主控plc根据此信号发出上升指令,输送托架220上升到位,该托架内部设置有到位检测传感器,当检测到上升到信号后,主控plc则发出传送指令,输送驱动系统222则在电机驱动下将石油钻杆400传送到全自动焊接主机100,同时支撑托架240自动上升到位对石油钻杆400进行辅助支撑,输送托架220自动下降。
38.全自动焊接:
39.当焊接主轴箱装置110后侧设置的石油钻杆400检测传感器检测到信号后,焊接主轴箱装置110内的主要轴箱111通过接受主控plc发出夹持指令,卡盘驱动系统113在电机驱动下将石油钻杆400夹紧,机器人焊接系统将焊枪移动到位,同时,夹持回转机构115在回转
驱动系统112驱动下带动石油钻杆400旋转,焊枪自动起弧并对石油钻杆400表面进行堆焊,焊接机器人系统120内的由送丝机装置160将焊接丝输送至机器人自动焊枪121内,通过机器人支撑底座123固定在地面上保持稳定后的机器人自动焊枪121由六轴焊接机器人122来沿石油钻杆400轴向摆动进行焊接;焊接过程视觉监测系统114自动对焊接质量进行实时监控,同时该监控画面可实时显示在远程监控显示屏上。按预设置角度焊接完成后,机器人自动焊枪121复位,卡盘驱动系统113驱动卡盘松开,在焊接过程中,由烟尘净化系统140来净化焊接所产生的刺激性气体,并通过焊接循环冷却水箱180来对焊接装置以及石油钻杆400进行冷却,减少机械生产所产生的残次品的概率,在非使用的情况下通过主控柜150来关闭焊接电源170对焊接装置的电源供给,方便操作控制减少能源的消耗。也可以通过人工操作现场操作盒130内的操作面板132来对全自动焊接系统进行人工操控焊接,在无人工进行全自动焊接时,通过可旋转支撑吊架131收放至一旁。
40.出料传送:
41.焊接完成后,由固定支撑底座210支撑的自动输送装置200通过第一升降驱动系统221将输送托架220自动上升到位,第二升降驱动系统242将支撑托架240自动下降到位,输送驱动系统222在电机驱动下反转将石油钻杆400传送出全自动焊接主机100;传送到位后输送托架220自动下降到位,由固定支架231固定支撑的自动上下料翻转机构230在液压联杆驱动组件232的液压缸驱动下支承板将石油钻杆400传送到上、下料架装置300的下料端,若还有焊接工作需求,则通过万向球支撑组件241同时会将上料端另一根石油钻杆400传送到输送托架220上,依次重复则可实现多根石油钻杆400的且自动焊接。
42.现场控制系统
43.现场控制系统由主控plc、焊接机器人、回转伺服、夹紧伺服、托架以及检测开关、安全光幕等组成。整个上料、下料、焊接过程由主控plc根据检测信号调度现场执行机构完成。
44.质量监测记录软件
45.焊接过程中,质量监测记录软件调用现场监控摄像头101照记录焊接过程。同时通过反馈照片自动判断焊接质量。发现质量异常时及时给主控plc下发异常处理指令并及时报警。
46.集装箱:
47.在对石油钻杆400进行焊接的过程中,本装置通过采用可移动集装箱190的模块化设计可方便野外作业使用,并且便于运输和安装,减少了在野外等恶劣环形下进行焊接后产生残次品的概率,并且减少对环境的污染。
48.如上即为本发明的实施例。上述实施例以及实施例中的具体参数仅是为了清楚表述发明的验证过程,并非用以限制本发明的专利保护范围,本发明的专利保护范围仍然以其权利要求书为准,凡是运用本发明的说明书及附图内容所作的等同结构变化,同理均应包含在本发明的保护范围内。
49.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型
要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1