一种新型的机器人自动拧紧夹具的制作方法
1.本实用新型涉及拧紧夹具技术领域,尤其涉及一种新型的机器人自动拧紧夹具。
背景技术:
2.螺栓拧紧器是用于变电设备间接作业时,绞紧、拆除、更换各种螺栓的工具。大扭矩的螺栓拧紧需要使用辅助臂进行拧紧时的抗扭,随着自动化设备的普及,很多自动产线上的拧紧工作由机器人来实现。
3.但是现有的机器人在进行大扭矩单轴拧紧时,拧紧反力会全部通过拧紧夹具施加到机器人本体上,如果拧紧轴扭矩太大,很容易造成机器人的损坏。
4.为此,我们提出一种新型的机器人自动拧紧夹具。
技术实现要素:
5.本实用新型主要是解决上述现有技术所存在的技术问题,提供一种新型的机器人自动拧紧夹具。
6.为了实现上述目的,本实用新型采用了如下技术方案,一种新型的机器人自动拧紧夹具,包括机器人夹具连接座,所述机器人夹具连接座活动卡合在机器人上,机器人夹具连接座的底部固定安装有安装活动框,安装活动框的底部固定安装有总连接固定板,总连接固定板的底部固定安装有回转机构,总连接固定板的顶部固定安装有固定连接块,固定连接块的外壁固定安装有拧紧轴固定板,拧紧轴固定板的顶部固定安装有拧紧轴机构,拧紧轴机构的左侧壁面固定安装有气管连接头,气管连接头的底部右侧固定安装有连接气管,连接气管的底部固定安装有气管安装头,安装活动框的右侧壁面后端设置有原点检测复位机构,拧紧轴固定板的底部右侧固定安装固定连接架,固定连接架的底部固定安装有反力杆。
7.进一步,所述回转机构包括有回转支承装置和回转驱动装置,回转驱动装置包括有转柱,回转支承装置包括有回转转盘、上支承和下支承。
8.进一步,所述拧紧轴机构的内部设置有输出轴,且输出轴活动贯穿固定连接块的内部。
9.进一步,所述原点检测复位机构包括有原点检测架,且原点检测架的左侧壁面与安装活动框的右侧壁面后端固定连接,原点检测架的内部固定安装有原点检测仪,且原点检测仪贯穿原点检测架的底部。
10.进一步,所述转柱的顶部与输出轴的底部固定连接,转柱的底部固定安装有螺栓拧紧头。
11.进一步,所述上支承的内壁活动卡合在转柱的外壁上端,下支承的内壁活动卡合在转柱的外壁下端。
12.进一步,所述原点检测架的背面固定安装有第一弹簧固定架,第一弹簧固定架的右侧壁面固定安装有复位弹簧。
13.进一步,所述复位弹簧的正面固定安装有第二弹簧固定架,且第二弹簧固定架的底部与拧紧轴固定板的顶部右侧固定连接。
14.进一步,所述拧紧轴固定板的顶部固定安装有原点检测接触片,且原点检测接触片的顶部与原点检测仪的底部活动接触。
15.有益效果
16.本实用新型提供了一种新型的机器人自动拧紧夹具。具备以下有益效果:
17.(1)、该一种新型的机器人自动拧紧夹具,通过设置了反力杆和回转机构,可将拧紧过程中产出的反力通过回转机构及反力杆施加到拧紧产品的本体上或者外部固定的机械机构上,避免了机器人本体直接承受反力做成损坏,机器人仅需要承受拧紧轴机构及夹具的自重,不需要承受拧紧过程中产生的反作用力。
18.(2)、该一种新型的机器人自动拧紧夹具,通过设置了原点检测机构,原点检测机构用于检测反力杆是否在原点位置,将信息反馈给机器人,防止反力杆没有复位导致没有起到反力的作用,避免了机器人受到反作用力导致损坏的情况发生。
19.(3)、该一种新型的机器人自动拧紧夹具,通过设置了复位弹簧,复位弹簧能够在拧紧结束后让反力杆复位,使反力杆在下一次拧紧时始终处于起始位置,保证反力杆能够起到反作用力的作用,提高了拧紧工作的效率。
20.(4)、该一种新型的机器人自动拧紧夹具,通过设置了机器人夹具连接座,可以直接将机器人夹具连接座固定在机器人上,整个操作简单便捷,提高了维修保养的效率。
21.(5)、该一种新型的机器人自动拧紧夹具,通过设置了拧紧轴固定板,拧紧轴固定板能够固定拧紧轴机构和反力杆,使反力杆能够及时受到拧紧的反作用力,同时也避免了反力杆与拧紧轴机构连接不稳定的情况发生。
附图说明
22.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义。
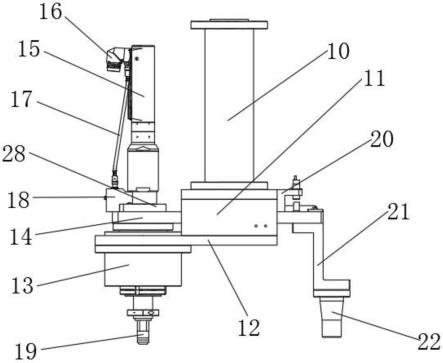
23.图1为本实用新型的正面整体结构示意图;
24.图2为本实用新型的内部结构剖视图;
25.图3为本实用新型的右侧壁面结构示意图;
26.图4为本实用新型的底部结构示意图;
27.图5为本实用新型的顶部结构示意图。
28.图例说明:10、机器人夹具连接座;11、安装活动框;12、总连接固定板;13、回转机构;14、拧紧轴固定板;15、拧紧轴机构;16、气管连接头;17、连接气管;18、气管安装头;19、螺栓拧紧头;20、原点检测架;21、固定连接架;22、反力杆;23、输出轴;24、回转转盘;25、上支承;26、下支承;27、转柱;28、固定连接块;29、原点检测仪;30、第一弹簧固定架;31、复位弹簧;32、第二弹簧固定架;34、原点检测接触片。
具体实施方式
29.实施例1
30.一种新型的机器人自动拧紧夹具,如图1-图2所示,包括机器人夹具连接座10,机器人夹具连接座10活动卡合在机器人上,机器人夹具连接座10的底部固定安装有安装活动框11,总连接固定板12的顶部固定安装有固定连接块28,固定连接块28的外壁固定安装有拧紧轴固定板14,拧紧轴机构15的左侧壁面固定安装有气管连接头16,气管连接头16的底部右侧固定安装有连接气管17,连接气管17的底部固定安装有气管安装头18,拧紧轴固定板14的底部右侧固定安装固定连接架21,固定连接架21的底部固定安装有反力杆22,转柱27的底部固定安装有螺栓拧紧头19,将机器人夹具连接座10固定在机器人上,将气泵连接到气管连接头16上,开启气泵的开关,气泵带动输出轴23开始旋转,输出轴23通过回转机构13绕轴心回转,螺栓拧紧头19将螺丝拧紧,反力杆22承受拧紧过程中产生的反力,复位弹簧31能在拧紧结束后让反力杆22复位,原点检测机构用于检测反力杆22是否在原点位置,将信息反馈给机器人,通过设置了反力杆22和回转机构13,可将拧紧过程中产出的反力通过回转机构13及反力杆22施加到拧紧产品的本体上或者外部固定的机械机构上,避免了机器人本体直接承受反力做成损坏,机器人仅需要承受拧紧轴机构15及夹具的自重,不需要承受拧紧过程中产生的反作用力。
31.实施例2
32.在实施例1的基础上,如图2所示,拧紧轴机构15的内部设置有输出轴23,且输出轴23活动贯穿固定连接块28的内部,回转机构13包括有回转支承装置和回转驱动装置,回转驱动装置包括有转柱27,且转柱27的顶部与输出轴23的底部固定连接,回转支承装置包括有回转转盘24、上支承25和下支承26,且上支承25的内壁活动卡合在转柱27的外壁上端,下支承26的内壁活动卡合在转柱27的外壁下端,通过将机器人夹具连接座10固定在机器人上,将气泵连接到气管连接头16上,开启气泵的开关,气泵带动输出轴23开始旋转,输出轴23通过回转机构13绕轴心回转,螺栓拧紧头19将螺丝拧紧,反力杆22承受拧紧过程中产生的反力,复位弹簧31能在拧紧结束后让反力杆22复位,原点检测机构用于检测反力杆22是否在原点位置,将信息反馈给机器人,将机器人夹具连接座10固定在机器人上,将气泵连接到气管连接头16上,开启气泵的开关,气泵带动输出轴23开始旋转,输出轴23通过回转机构13绕轴心回转,螺栓拧紧头19将螺丝拧紧,反力杆22承受拧紧过程中产生的反力,复位弹簧31能在拧紧结束后让反力杆22复位,原点检测机构用于检测反力杆22是否在原点位置,将信息反馈给机器人,通过设置了原点检测机构,原点检测机构用于检测反力杆22是否在原点位置,将信息反馈给机器人,防止反力杆22没有复位导致没有起到反力的作用,避免了机器人受到反作用力导致损坏的情况发生。
33.实施例3
34.在实施例1和实施例2的基础上,如图3所示,安装活动框11的右侧壁面后端设置有原点检测复位机构,原点检测复位机构包括有原点检测架20,且原点检测架20的左侧壁面与安装活动框11的右侧壁面后端固定连接,原点检测架20的内部固定安装有原点检测仪29,原点检测仪29为现有技术,在此不做赘述,且原点检测仪29贯穿原点检测架20的底部,原点检测架20的背面固定安装有第一弹簧固定架30,第一弹簧固定架30的右侧壁面固定安装有复位弹簧31,复位弹簧31的正面固定安装有第二弹簧固定架32,且第二弹簧固定架32的底部与拧紧轴固定板14的顶部右侧固定连接,拧紧轴固定板14的顶部固定安装有原点检测接触片34,且原点检测接触片34的顶部与原点检测仪29的底部活动接触,通过将机器人
夹具连接座10固定在机器人上,将气泵连接到气管连接头16上,开启气泵的开关,气泵带动输出轴23开始旋转,输出轴23通过回转机构13绕轴心回转,螺栓拧紧头19将螺丝拧紧,反力杆22承受拧紧过程中产生的反力,复位弹簧31能在拧紧结束后让反力杆22复位,原点检测机构用于检测反力杆22是否在原点位置,将信息反馈给机器人,将机器人夹具连接座10固定在机器人上,将气泵连接到气管连接头16上,开启气泵的开关,气泵带动输出轴23开始旋转,输出轴23通过回转机构13绕轴心回转,螺栓拧紧头19将螺丝拧紧,反力杆22承受拧紧过程中产生的反力,复位弹簧31能在拧紧结束后让反力杆22复位,原点检测机构用于检测反力杆22是否在原点位置,将信息反馈给机器人,通过设置了复位弹簧31,复位弹簧31能够在拧紧结束后让反力杆22复位,使反力杆22在下一次拧紧时始终处于起始位置,保证反力杆22能够起到反作用力的作用,提高了拧紧工作的效率。
35.实施例4
36.在实施例1、实施例2和实施例3的基础上,如图4所示,安装活动框11的底部固定安装有总连接固定板12,总连接固定板12的底部固定安装有回转机构13,通过将机器人夹具连接座10固定在机器人上,将气泵连接到气管连接头16上,开启气泵的开关,气泵带动输出轴23开始旋转,输出轴23通过回转机构13绕轴心回转,螺栓拧紧头19将螺丝拧紧,反力杆22承受拧紧过程中产生的反力,复位弹簧31能在拧紧结束后让反力杆22复位,原点检测机构用于检测反力杆22是否在原点位置,将信息反馈给机器人,将机器人夹具连接座10固定在机器人上,将气泵连接到气管连接头16上,开启气泵的开关,气泵带动输出轴23开始旋转,输出轴23通过回转机构13绕轴心回转,螺栓拧紧头19将螺丝拧紧,反力杆22承受拧紧过程中产生的反力,复位弹簧31能在拧紧结束后让反力杆22复位,原点检测机构用于检测反力杆22是否在原点位置,将信息反馈给机器人,将机器人夹具连接座10固定在机器人上,将气泵连接到气管连接头16上,开启气泵的开关,气泵带动输出轴23开始旋转,输出轴23通过回转机构13绕轴心回转,螺栓拧紧头19将螺丝拧紧,反力杆22承受拧紧过程中产生的反力,复位弹簧31能在拧紧结束后让反力杆22复位,原点检测机构用于检测反力杆22是否在原点位置,将信息反馈给机器人,通过设置了机器人夹具连接座10,可以直接将机器人夹具连接座10固定在机器人上,整个操作简单便捷,提高了维修保养的效率。
37.实施例5
38.在实施例1、实施例2、实施例3和实施例4的基础上,如图5所示,拧紧轴固定板14的顶部固定安装有拧紧轴机构15,拧紧轴机构15为现有技术,在此不做赘述,通过将机器人夹具连接座10固定在机器人上,将气泵连接到气管连接头16上,开启气泵的开关,气泵带动输出轴23开始旋转,输出轴23通过回转机构13绕轴心回转,螺栓拧紧头19将螺丝拧紧,反力杆22承受拧紧过程中产生的反力,复位弹簧31能在拧紧结束后让反力杆22复位,原点检测机构用于检测反力杆22是否在原点位置,将信息反馈给机器人,将机器人夹具连接座10固定在机器人上,将气泵连接到气管连接头16上,开启气泵的开关,气泵带动输出轴23开始旋转,输出轴23通过回转机构13绕轴心回转,螺栓拧紧头19将螺丝拧紧,反力杆22承受拧紧过程中产生的反力,复位弹簧31能在拧紧结束后让反力杆22复位,原点检测机构用于检测反力杆22是否在原点位置,将信息反馈给机器人,将机器人夹具连接座10固定在机器人上,将气泵连接到气管连接头16上,开启气泵的开关,气泵带动输出轴23开始旋转,输出轴23通过回转机构13绕轴心回转,螺栓拧紧头19将螺丝拧紧,反力杆22承受拧紧过程中产生的反力,
复位弹簧31能在拧紧结束后让反力杆22复位,原点检测机构用于检测反力杆22是否在原点位置,将信息反馈给机器人,通过设置了拧紧轴固定板14,拧紧轴固定板14能够固定拧紧轴机构15和反力杆22,使反力杆22能够及时受到拧紧的反作用力,同时也避免了反力杆22与拧紧轴机构15连接不稳定的情况发生。
39.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1