一种桁架臂起重机平衡梁及转接拉板焊接变位机的制作方法
本技术涉及一种焊接变位机,尤其涉及一种桁架臂起重机平衡梁及转接拉板焊接变位机。
背景技术:
1、为实现复杂工件的机器人自动焊接,需要使用变位机装夹和调整工件焊接角度。平衡梁及转接拉板是桁架臂起重机拉索的重要组成部分,用于调整起重机主臂俯仰角度,适应不同的工作范围。这些工件需要通过焊接进行制造。然而由于起重机型号不同,平衡梁及转接拉板的尺寸也不同。即使是一台起重机的不同位置上,也使用不同规格的平衡梁及转接拉板,因此全部的平衡梁及转拉板在整体长度、截面尺寸,两端连接形式,焊缝位置等方面变化很大,给工件装夹带来很大困难。
2、因为平衡梁和转接拉板形式很多,按照常规思路,就需要在变位机上安装不同形式的工装。为实现生产需要,一方面需要设计和制造的工装种类多、投资大,且每次切换产品时,都需要提前更换工装,安装调整时间影响整体生产效率。另外一方面,因为一部分焊缝会被工装本身遮挡,造成机器人无法焊接,所以需要拆卸翻转后重新装夹,才能焊接全部焊缝,占用人工并影响生产效率。此外,使用工装固定零部件的方式也比较繁琐,需要人工操作插销、挡块、压板等。
3、此外,也可以考虑使用工件两端的圆孔进行装夹定位,为兼容直径范围有变化的圆孔,通常采用锥销的方式定位。但是此种定位方式适应性很差,因为一方面圆孔直径变化大,需要锥销的高度变高,但圆锥变高之后,又无法兼容宽度比较窄的工件,因为对中夹紧时锥销顶端会互相干涉。虽然可以通过根据不同类型的工件更换锥销,但是也随之带来额外的人工操作成本,更换错误还有可能导致工件或者设备受损。
4、由此可见,现有工装在对工件进行装夹及翻转过程中并不能实现自动运行,且针对不同形式的工件需要更换不同的工装。
技术实现思路
1、实用新型目的:本实用新型目的是提供一种桁架臂起重机平衡梁及转接拉板焊接变位机,通过独立旋转和距离可调的两套对中装置,实现对平衡梁及转接拉板的自动装夹定位和翻转变位,且针对不同形式的工件,适应性好,不需要更换特定零件。
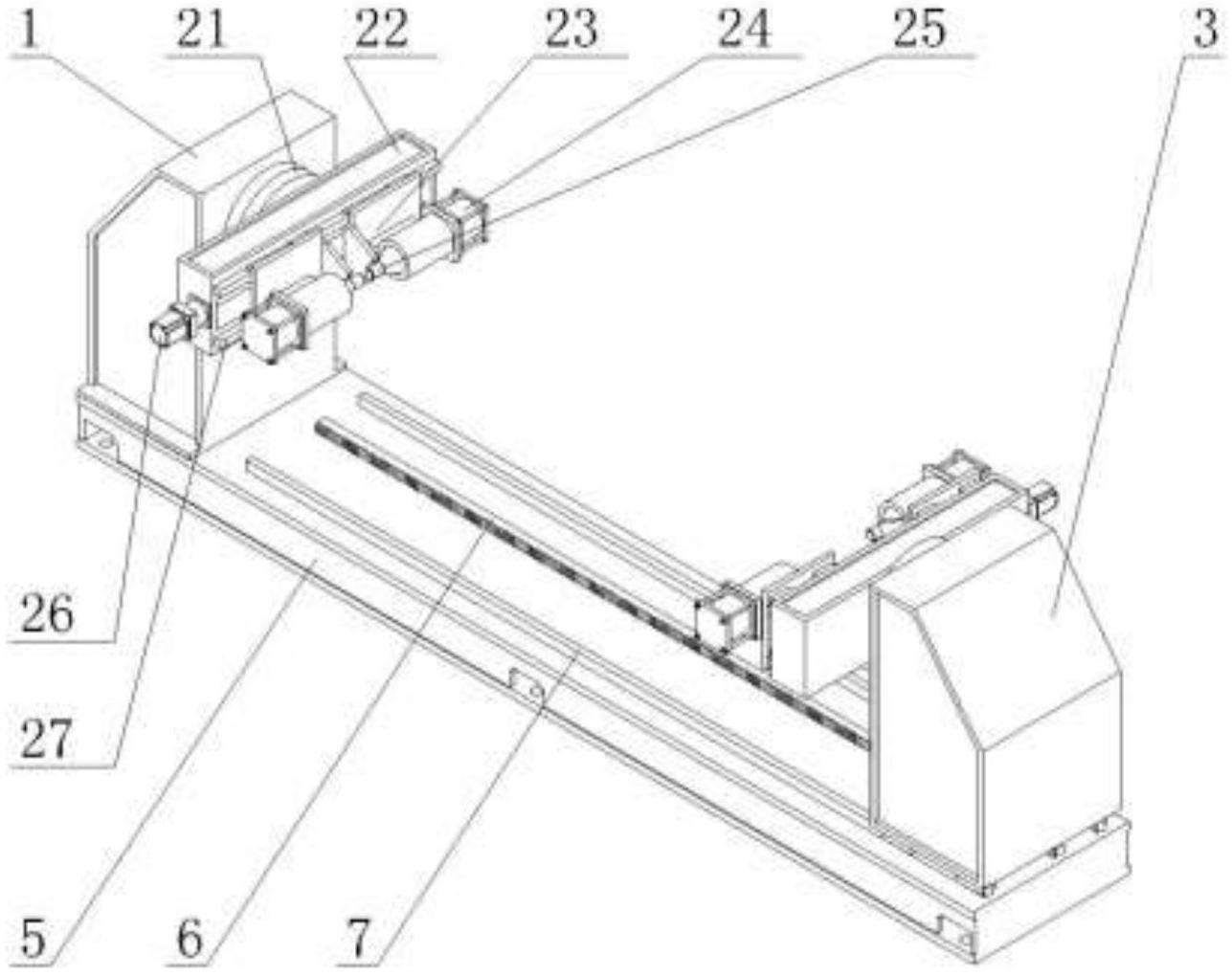
2、技术方案:本实用新型包括第一底座,所述第一底座表面相对的两侧分别安装有第一支架和第二支架,两侧支架相对的一侧分别转动连接有对中装置,所述对中装置包括第二底座,两侧第二底座相对的一面均滑动连接有对中机构,对中机构包括滑动设置在第二底座上的对中挡板,两侧的对中挡板相对设置,对中挡板上设有伸缩机构,两侧的伸缩机构相对设置。
3、所述伸缩机构包括驱动机构,两侧的驱动机构分别安装在两侧对中挡板相互远离的一端,驱动机构的伸出端安装有伸缩结构,两侧的伸缩结构相对设置。
4、所述的伸缩结构采用杆件结构,杆件头部与工件接触部位为平面或中空面,杆件结构和工件接触部分的周向尺寸较小,中部平滑过渡,导向部分的周向尺寸较大。
5、所述第一支架和第二支架中至少有一个为移动支架。
6、所述第一底座上设有第一导轨,所述移动支架在第一导轨上滑动。
7、所述第二底座上设有第二导轨,所述第二导轨上滑动连接有对中挡板。
8、所述第二底座一侧安装有传动机构,所述传动机构与对中挡板连接。
9、所述第一支架和第二支架上转动连接有转盘,所述转盘上转动连接有对中装置。
10、所述伸缩结构外侧设有导套。
11、有益效果:本实用新型通过独立旋转和距离可调的两套对中装置,实现对平衡梁及转接拉板的自动装夹定位和翻转变位,装夹的同时也可以实现翻转变位,节省了拆卸工件并翻转的时间,提高了整体的工作效率;可实现多种工件的装夹定位,不需要根据工件制作多种装夹工装,降低了生产成本,减少了更换工装所需的时间。
技术特征:
1.一种桁架臂起重机平衡梁及转接拉板焊接变位机,其特征在于,包括第一底座,所述第一底座表面相对的两侧分别安装有第一支架和第二支架,两侧支架相对的一侧分别转动连接有对中装置,所述对中装置包括第二底座,两侧第二底座相对的一面均滑动连接有对中机构,对中机构包括滑动设置在第二底座上的对中挡板,两侧的对中挡板相对设置,对中挡板上设有伸缩机构,两侧的伸缩机构相对设置。
2.根据权利要求1所述的一种桁架臂起重机平衡梁及转接拉板焊接变位机,其特征在于,所述伸缩机构包括驱动机构,两侧的驱动机构分别安装在两侧对中挡板相互远离的一端,驱动机构的伸出端安装有伸缩结构,两侧的伸缩结构相对设置。
3.根据权利要求2所述的一种桁架臂起重机平衡梁及转接拉板焊接变位机,其特征在于,所述的伸缩结构采用杆件结构,杆件头部与工件接触部位为平面或中空面,杆件结构和工件接触部分的周向尺寸较小,中部平滑过渡,导向部分的周向尺寸较大。
4.根据权利要求3所述的一种桁架臂起重机平衡梁及转接拉板焊接变位机,其特征在于,所述第一支架和第二支架中至少有一个为移动支架。
5.根据权利要求4所述的一种桁架臂起重机平衡梁及转接拉板焊接变位机,其特征在于,所述第一底座上设有第一导轨,所述移动支架在第一导轨上滑动。
6.根据权利要求1或5所述的一种桁架臂起重机平衡梁及转接拉板焊接变位机,其特征在于,所述第二底座上设有第二导轨,所述第二导轨上滑动连接有对中挡板。
7.根据权利要求6所述的一种桁架臂起重机平衡梁及转接拉板焊接变位机,其特征在于,所述第二底座一侧安装有传动机构,所述传动机构与对中挡板连接。
8.根据权利要求4所述的一种桁架臂起重机平衡梁及转接拉板焊接变位机,其特征在于,所述第一支架和第二支架上转动连接有转盘,所述转盘上转动连接有对中装置。
9.根据权利要求2所述的一种桁架臂起重机平衡梁及转接拉板焊接变位机,其特征在于,所述伸缩结构外侧设有导套。
技术总结
本技术公开了一种桁架臂起重机平衡梁及转接拉板焊接变位机,包括第一底座,所述第一底座表面相对的两侧分别安装有第一支架和第二支架,两侧支架相对的一侧分别转动连接有对中装置,对中装置包括第二底座,两侧第二底座相对的一面均滑动连接有对中机构,对中机构包括滑动设置在第二底座上的对中挡板,两侧的对中挡板相对设置,对中挡板上设有伸缩机构,两侧的伸缩机构相对设置。本技术通过独立旋转和距离可调的两套对中装置,实现对平衡梁及转接拉板的自动装夹定位和翻转变位,节省了拆卸工件并翻转的时间,提高了整体的工作效率;可实现多种工件的装夹定位,不需要根据工件制作多种装夹工装,降低了生产成本,减少了更换工装所需的时间。
技术研发人员:余钦伟,周鑫淼,马永超,毛耀本
受保护的技术使用者:徐工集团工程机械股份有限公司建设机械分公司
技术研发日:20221208
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!