一种激光加工过程中多参量实时监测光学装置及方法与流程
1.本发明涉及激光加工探测技术领域,尤其涉及一种激光加工过程中多参量实时监测光学装置及方法。
背景技术:
2.激光加工技术是近几十年内发展起来的新型加工技术,由于激光束具有高能量的特点,可使材料在短时间内达到很高的温度,从而通过融化或气化效应实施材料的加工。此外,激光为无接触式的加工方式,不会对材料产生机械冲击、无机械磨损,因而热影响区小。并且,由于激光束可以聚焦到很小的尺寸,因而可对各类材料进行高质量的精密加工,已在各类工业和科研领域得到了广泛应用。
3.为了进一步保证激光加工的质量,往往需要对加工过程中的各种现象或参量进行实时监测,比如:实时观察加工区域的视觉图像以修正加工参数、通过实时温度监测对激光输出的平均功率进行反馈控制等等。这些参量的监测一般也都是通过光学的检测或成像而得到,但不同的监测对象往往具有不同的波长。例如,视觉成像一般采用可见光波段进行检测,测温一般采用红外波段进行检测,其中,不同温度范围的检测波长也不相同。而作为加工光源的激光波长一般以355nm、532nm和1064nm这三类为主,与这些检测光源的波长几乎都不同,这就导致加工光源和检测光源在通过同一套光学系统时由于色散效应的存在而无法聚焦到同一位置的问题,因而无法准确监测,甚至无法监测。
4.消色差透镜就是一种专门为消除多波长光源色散效应而设计的光学器件,但对高功率激光而言,由于普通玻璃材料的热透镜效应,激光设备中聚焦透镜所使用的玻璃种类存在一定的限制,导致聚焦透镜无法实现消色差设计。另一种方法是面阵扫描的方式,通过振镜在加工区域附近扫描一个面阵,然后通过探测器分析处理得到最终的检测结果,但是这种方案价格比较昂贵,且需要一定的处理时间,远不能满足测温这一类需要μs量级的探测时间需求。
5.公开号为cn112828452b的发明专利公开了一种二维激光云扫描成像装置,该装置利用单台或两台激光器发出扫描成像激光和加工激光,通过加工光路振镜的扫描实现样件表面的二维扫描成像。由于二者波长一样或相近,可避免色散效应的影响。然而,单台激光器情况下,由于扫描成像激光为低功率激光,与加工激光要分时输出,因而无法实现实时监测。虽然采用两台激光器可实现实时监测,但确定的波长限制了此成像装置的应用范围。此外,若采用的激光源为红外或紫外,还需要特殊的探测器才能实现成像功能,增加了成本。
技术实现要素:
6.本发明的目的在于针对已有的技术现状,提供一种激光加工过程中多参量实时监测光学装置及方法,可以在激光加工过程中对多参量进行准确的实时监测,而且响应速度快、成本低,具有很强的工业实用性。
7.为达到上述目的,本发明采用如下技术方案:
一种激光加工过程中多参量实时监测光学装置,包括加工系统以及至少一路探测系统;所述加工系统包括激光器、扩束准直镜、第一反射镜组和聚焦装置,激光器发出的加工光束经过扩束准直镜放大和准直,再经过第一反射镜组导光至聚焦装置,最终由聚焦装置聚焦至待加工产品表面,形成加工作用点;所述探测系统包括探测器、探测光源、扫描装置和第二反射镜组,探测光源发出的探测光束经过扫描装置偏转,再依次经过第二反射镜组导光至第一反射镜组、经过第一反射镜组导光至聚焦装置,并由聚焦装置聚焦至待加工产品表面,形成与加工作用点重合的探测作用点,探测光束在待加工产品表面产生反射,随后依次经过第一反射镜组、第二反射镜组、扫描装置,最终被探测器接收。
8.进一步的,所述扫描装置为振镜或压电扫描器或声光调制器。
9.进一步的,所述聚焦装置为振镜扫描式或物镜式。
10.进一步的,所述激光器为超快激光器或非超快激光器,其波长为紫外波段或可见光波段或红外波段。
11.进一步的,所述第一反射镜组包括第一反射镜和第二反射镜,第一反射镜用于导光至第二反射镜,第二反射镜用于导光至聚焦装置。
12.进一步的,所述第二反射镜组包括第三反射镜,第三反射镜用于导光至第二反射镜。
13.一种激光加工过程中多参量实时监测方法,采用上述激光加工过程中多参量实时监测光学装置,包括以下步骤:通过加工系统开展激光加工作业,同时,通过各个探测系统执行不同参量的实时监测,其中:当加工系统的聚焦装置为物镜式时,包括以下步骤:对每一探测系统的扫描装置进行校正,使探测作用点与加工作用点重合,再开展激光加工作业,并执行不同参量的实时监测;当加工系统的聚焦装置为振镜扫描式时,包括以下步骤:s1、对加工系统的聚焦装置进行校正,使加工作用点满足加工要求;s2、对每一探测系统的扫描装置进行校正,得到探测作用点与相应加工作用点之间的补偿关系;s3、加工系统沿加工路径执行加工扫描,开展激光加工作业,各个探测系统根据步骤s2所得补偿关系沿加工路径执行补偿扫描,使每一探测系统的探测作用点与加工系统的加工作用点始终重合,执行不同参量的实时监测。
14.进一步的,对每一探测系统的扫描装置进行校正后,执行不同参量的实时监测,包括以下步骤:通过扫描装置驱动探测光束进行高速二维扫描,再通过探测器识别、分析从待加工产品表面产生反射的探测光束,得出对应参量的最终监测结果。
15.本发明的有益效果为:相比于现有技术,本发明在探测系统中增加扫描装置,可以使探测光束偏转一个特定角度,进而使探测光束与加工光束非同轴传输,并对扫描装置进行校正,保证探测作用点与加工作用点在待加工产品表面重合,从而避免色散效应影响,实现在激光加工过程中对多参量进行准确的实时监测,而且响应速度快、成本低,具有很强的工业实用性。
附图说明
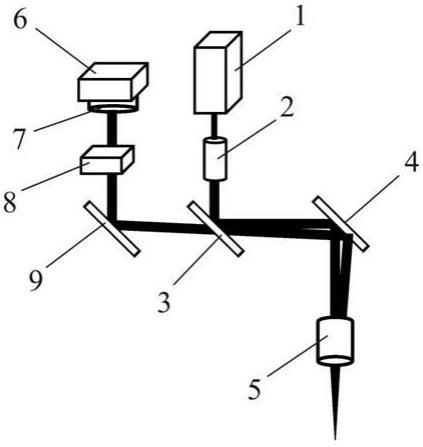
16.图1为本发明激光加工过程中多参量实时监测光学装置的光路结构示意图;图2为加工光束与探测光束同轴传输的光学装置的光路结构示意图;图3为加工光束与探测光束同轴传输的光学装置中发生色散效应的示意图,其中:(a)加工光束的聚焦示意图;(b)待加工产品表面的加工作用点、监测作用点示意图。
17.标注说明:1、激光器,2、扩束准直镜,3、第一反射镜,4、第二反射镜,5、聚焦装置,6、探测器,7、探测光源,8、扫描装置,9、第三反射镜。
具体实施方式
18.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施实例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实例仅仅用以解释本发明,并不用于限定本发明。
19.请参阅图1所示,一种激光加工过程中多参量实时监测光学装置,包括加工系统以及至少一路探测系统。
20.加工系统包括激光器1、扩束准直镜2、第一反射镜组和聚焦装置5,激光器1发出的加工光束经过扩束准直镜2放大和准直,再经过第一反射镜组导光至聚焦装置5,最终由聚焦装置5聚焦至待加工产品表面,形成加工作用点。
21.上述技术方案中:激光器1为超快激光器或非超快激光器,其波长为紫外波段或可见光波段或红外波段,具体选型以工艺需求为准;第一反射镜组包括第一反射镜3和第二反射镜4,第一反射镜3用于导光至第二反射镜4,第二反射镜4用于导光至聚焦装置5;聚焦装置5为振镜扫描式或物镜式,具体选型以工艺需求为准。
22.探测系统包括探测器6、探测光源7、扫描装置8和第二反射镜组,探测光源7发出的探测光束经过扫描装置8偏转,再依次经过第二反射镜组导光至第一反射镜组、经过第一反射镜组导光至聚焦装置5,并由聚焦装置5聚焦至待加工产品表面,形成与加工作用点重合的探测作用点,探测光束在待加工产品表面产生反射,随后依次经过第一反射镜组、第二反射镜组、扫描装置8,最终被探测器6接收。
23.上述技术方案中:探测器6根据监测对象进行合理选择,比如:视觉监测采用ccd(电荷耦合器件),温度传感采用热电偶或红外测温仪等;探测光源7也需要根据监测对象进行合理选择,比如:视觉监测采用波长为480nm或650nm或850nm的光源,低温测温采用波长为10μm的红外光源,高温测温采用波长为1.0μm的红外光源,其他温区可采用波长为1.6μm或2.2μm或3.9μm红外光源;扫描装置8为振镜或压电扫描器或声光调制器,具体选型以工艺需求为准。其中,振镜为双轴式扫描器件,速度快,可实现微秒级响应;压电扫描器虽然比振镜稍慢,但仍然可满足视觉监测等一类静态探测的需求,而且配置简单,系统灵活多变,价格经济;声光调制器的响应速度达纳秒级别,可实现高速实时监测的需求;第二反射镜组包括第三反射镜9,第三反射镜9用于导光至第二反射镜4。
24.请参阅图1所示,一种激光加工过程中多参量实时监测方法,采用上述激光加工过程中多参量实时监测光学装置,通过加工系统开展激光加工作业,同时,通过各个探测系统执行不同参量的实时监测,其中:当加工系统的聚焦装置5为物镜式时,激光焦点为静态,仅依靠移动待加工产品的位移台即可实现加工操作,操作步骤如下:对每一探测系统的扫描装置8进行校正,使探测作用点与加工作用点重合,再开展激光加工作业,并执行不同参量的实时监测;当加工系统的聚焦装置5为振镜扫描式时,加工作用点依靠振镜扫描式聚焦装置5的驱动实现加工操作,其在待加工产品表面的轨迹是不断变动的,操作步骤如下:s1、对加工系统的聚焦装置5进行校正,使加工作用点满足加工要求;s2、对每一探测系统的扫描装置8进行校正,得到探测作用点与相应加工作用点之间的补偿关系;s3、加工系统沿加工路径执行加工扫描,开展激光加工作业,各个探测系统根据步骤s2所得补偿关系沿加工路径执行补偿扫描,使每一探测系统的探测作用点与加工系统的加工作用点始终重合,执行不同参量的实时监测。
25.上述技术方案中,为获取探测作用点与相应加工作用点之间的补偿关系(包含距离、方向等要素),需要对每一探测系统的扫描装置8进行校正,形成探测作用点与相应加工作用点之间的补偿值,然而校正点的数量有限,需要再通过拟合的方法将有限的校正点扩大到整个加工幅面。
26.此外,由于各个探测系统的扫描装置8之间的执行时间存在差异,还需要通过上位机对控制器下发协调命令,以保证不同探测作用点与加工作用点在时间上的一致性。
27.优选的,为了降低对位难度,对每一探测系统的扫描装置8进行校正后,执行不同参量的实时监测,包括以下步骤:通过扫描装置8驱动探测光束进行高速二维扫描,再通过探测器6识别、分析从待加工产品表面产生反射的探测光束,得出对应参量的最终监测结果。
28.请参阅图2-3所示,作为对比,加工光束与探测光束同轴传输的光学装置中,由于检测光源与加工光源波长不同,在同一套光路系统中,显然会受到色散效应的影响。
29.具体来说,为了保证加工质量,加工系统的聚焦装置5需与加工光源匹配,而其他波长的检测光源在通过此光路系统后会出现轴向偏移和垂轴偏移,最终在待加工产品表面上,表现为加工作用点与探测作用点不一致。
30.总的来说,本发明在探测系统中增加扫描装置8,可以使探测光束偏转一个特定角度,进而使探测光束与加工光束非同轴传输,并对扫描装置8进行校正,保证探测作用点与加工作用点在待加工产品表面重合,从而避免色散效应影响,实现在激光加工过程中对多参量进行准确的实时监测,而且响应速度快、成本低,具有很强的工业实用性。
31.本发明不仅局限于上述具体实施方式,本领域一般技术人员根据本发明公开的内容,可以采用其它多种具体实施方式实施本发明,因此,凡是采用本发明的设计结构和思路,做一些简单的变化或更改的设计,都落入本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1