一种多功能的气缸装配设备的制作方法
本发明涉及一种多功能的气缸装配设备,属于工业控制。
背景技术:
1、目前,随着工业4.0时代发展,很多重复性,简单化的工艺工序都会选择自动化产品代替人工劳动,减轻了工人的劳动强度,企业也大大的减少人力成本的投入。随之企业需要的是能够设计设备、装配设备、操作设备,检测设备、维修设备等技术性较高的技术人员。在这样的背景下,就需要培养出在机电一体化设备和机器人应用方面的设计、装配、开发调试等综合能力强的技术人员。
2、针对以上需求,我们设计一款多功能的气缸装配设备不但可用于不同层次、不同技能水平要求的中、高职院校及应用型本科院校的一线教学实验实训需求,还能够作为企业、行业的职业技能培训设备使用。目前市场现有气缸装配设备主要还是用于工厂实际装配使用,结构复杂,体积庞大,装配工序较为复杂,设备功能单一,成本较高,不适应用于教学领域的应用与学习。
技术实现思路
1、本发明的目的在于提供一种多功能的气缸装配设备,以解决现有气缸装配设备主要还是用于工厂实际装配使用,结构复杂,体积庞大,装配工序较为复杂的缺陷。
2、一种多功能的气缸装配设备,包括:
3、基础台架,所述基础台架设有工作台,所述工作台上设有机器人组件、快换抓手库、气缸装配模块a、气缸装配模块b和缓冲接驳单元;
4、所述机器人组件包括由机器人底座、机器人和抓手工装,所述机器人设于机器人底座上,所述机器人底座与工作台固定,所述抓手工装设于机器人的执行端;
5、所述快换抓手库包括与抓手工装配合的子抓手及用于安装子抓手的安装支架;
6、所述气缸装配模块a和气缸装配模块b位于机器人侧部,用于将机器人提供气缸装配部件进行装配;
7、所述缓冲接驳单元用于运送缸体、活塞以及已装配完的气缸。
8、进一步地,所述子抓手包括搬运子抓手、吸盘子抓手、电动螺丝刀子抓手、打磨机画笔子抓手、焊枪与胶枪子抓手,每个子抓手上设有与抓手工装的电极母座匹配的电极公座。
9、进一步地,所述工作台内部上层固定带有滑轨的元件安装板,所述安装板下部设置机器人控制器。
10、进一步地,所述气缸装配模块a包括支撑框架,所述支撑框架上设有双螺钉供料单元、上缸盖供料单元和下缸盖供料单元,所述上缸盖供料单元和下缸盖供料单元结构相同。
11、进一步地,所述双螺钉供料单元包括螺钉供料安装支架一、笔形气缸一、推块一、螺钉供料仓、螺钉到位定位块、螺钉和螺钉检测传感器;所述笔形气缸一固定于螺钉供料安装支架上,所述推块一固定在笔形气缸一上,所述螺钉放置于螺钉供料仓内,并将螺钉供料仓固定于螺钉供料安装支架一上,所述笔形气缸一推动推块一将螺钉供料仓内螺钉推至螺钉到位定位块位置,螺钉检测传感器用于检测螺钉是否到位。
12、进一步地,所述上缸盖供料单元包括上缸盖供料支架、笔形气缸二、推块二、缸盖供料仓、上端盖、端盖定位块和缸盖传感器;所述笔形气缸二固定于缸盖供料支架上,所述推块二固定在笔形气缸一上,所述上端盖放置于缸盖供料仓内,并将缸盖供料仓固定于支架上,所述笔形气缸二推动推块二将缸盖供料仓内上端盖推至端盖定位块位置,缸盖传感器用于检测上端盖是否到位。
13、进一步地,所述气缸装配模块b包括支撑框架二,所述支撑框架二上设有缸体定位块、夹紧定位块、定位块缓存区、螺钉定位块、活塞缓存区、气缸翻转平台和气缸装配区,所述缸体定位块和笔形气缸三分别固定于支撑框架二上、夹紧定位块与笔形气缸三固定,笔形气缸三带动夹紧定位块夹紧装配气缸于缸体定位块。
14、进一步地,所述缓冲接驳单元包括接驳支撑框架、传输带以及托盘,所述托盘放于传输带上,所述托盘上用于放置活塞、缸体、已装配完的气缸以及用于运送装配完的气缸。
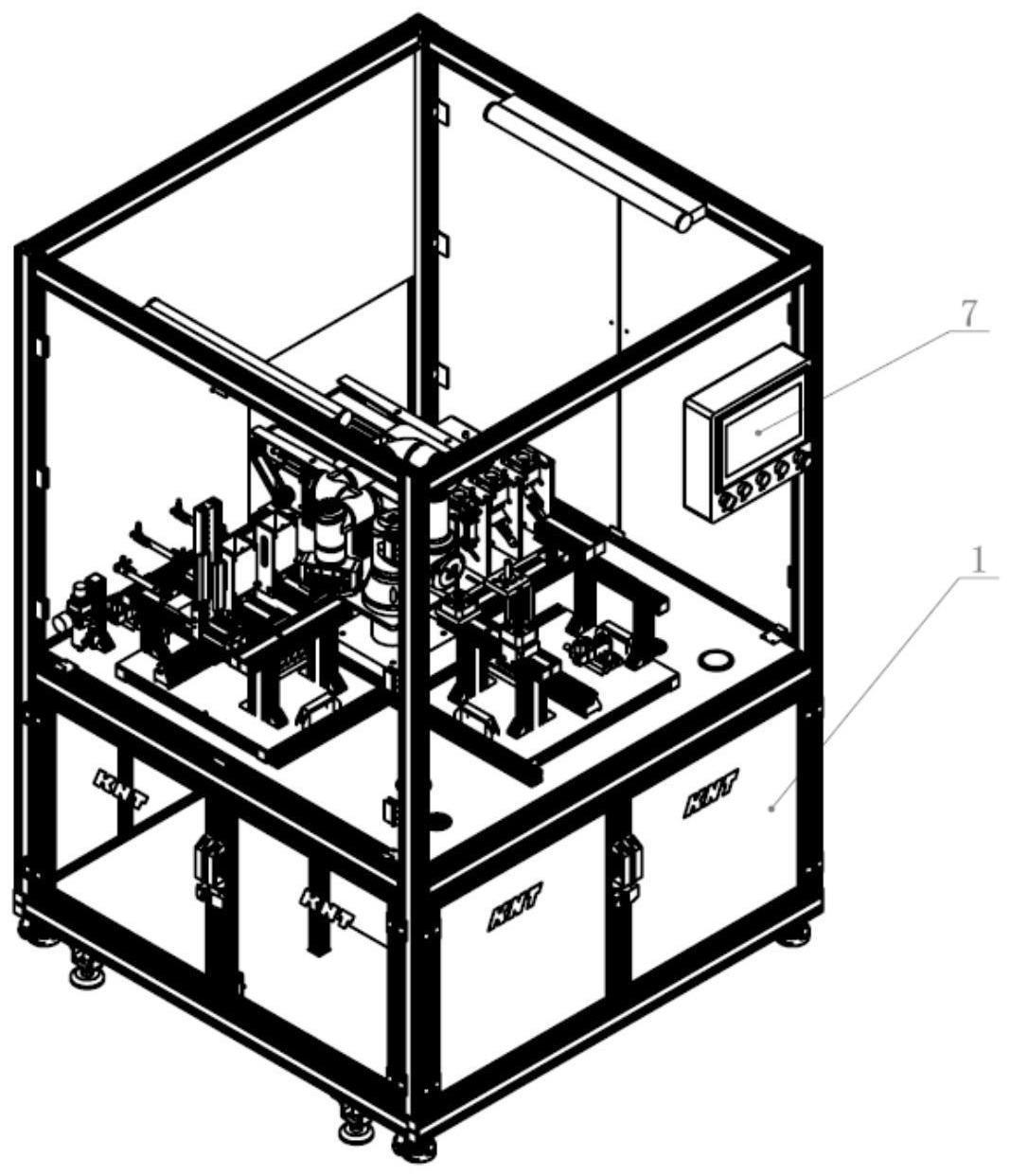
15、进一步地,所述基础台架设有触摸屏组件单元,所述触摸屏组件单元由触摸屏、按钮以及触摸屏支架组成。
16、进一步地,所述工作台两侧采用双开门,并设置有散热风机,所述工作台上面四周安装有机玻璃。
17、与现有技术相比,本发明所达到的有益效果:
18、1、本发明采用模块化功能设计,所有功能模块均固定在基础台架上,以方便快速更换功能模块。系统通过切换不同的机器人应用功能模块的配套抓手,可实现机器人搬运、模拟打磨抛光、模拟焊接、轨迹模拟、气缸装配等多种机器人典型应用技术。该设备综合了自动控制、位置控制、电机控制、气动控制、可编程控制器、触摸屏组态软件开发、传感器、机器人等技术,是典型的机电一体化控制、机器人应用设备。
19、2、本发明可完成一整套气缸装配流程,同时也可以完成典型应用训练如模拟焊接、模拟抛光、模拟码垛等专业加工训练的运行操作。也可以在目前设备的基础上实现更多的功能和应用,既源于生产实际、又符合教学规律要求,便于教师带领学生开展多项专业教学实验。
技术特征:
1.一种多功能的气缸装配设备,其特征在于,包括:
2.根据权利要求1所述的多功能的气缸装配设备,其特征在于,所述子抓手包括搬运子抓手(19)、吸盘子抓手(20)、电动螺丝刀子抓手(21)、打磨机画笔子抓手(22)、焊枪与胶枪子抓手(23),每个子抓手上设有与抓手工装(16)的电极母座(17)匹配的电极公座。
3.根据权利要求1所述的多功能的气缸装配设备,其特征在于,所述工作台内部上层固定带有滑轨的元件安装板(11),所述安装板(11)下部设置机器人控制器(12)。
4.根据权利要求1所述的多功能的气缸装配设备,其特征在于,所述气缸装配模块a(4)包括支撑框架(24),所述支撑框架(24)上设有双螺钉供料单元(25)、上缸盖供料单元(26)和下缸盖供料单元(27),所述上缸盖供料单元(26)和下缸盖供料单元(27)结构相同。
5.根据权利要求4所述的多功能的气缸装配设备,其特征在于,所述双螺钉供料单元(25)包括螺钉供料安装支架一(32)、笔形气缸一(28)、推块一(29)、螺钉供料仓(30)、螺钉到位定位块(34)、螺钉(31)和螺钉检测传感器(33);所述笔形气缸一(28)固定于螺钉供料安装支架(32)上,所述推块一(29)固定在笔形气缸一(28)上,所述螺钉(31)放置于螺钉供料仓(30)内,并将螺钉供料仓(30)固定于螺钉供料安装支架一(32)上,所述笔形气缸一(28)推动推块一(29)将螺钉供料仓(30)内螺钉(31)推至螺钉到位定位块(34)位置,螺钉检测传感器(33)用于检测螺钉(31)是否到位。
6.根据权利要求5所述的多功能的气缸装配设备,其特征在于,所述上缸盖供料单元(26)包括上缸盖供料支架(38)、笔形气缸二(35)、推块二(36)、缸盖供料仓(37)、上端盖(39)、端盖定位块(41)和缸盖传感器(40);所述笔形气缸二(35)固定于缸盖供料支架(38)上,所述推块二(36)固定在笔形气缸一(35)上,所述上端盖(39)放置于缸盖供料仓(37)内,并将缸盖供料仓(37)固定于支架(38)上,所述笔形气缸二(35)推动推块二(36)将缸盖供料仓(37)内上端盖(39)推至端盖定位块(41)位置,缸盖传感器(40)用于检测上端盖(39)是否到位。
7.根据权利要求1所述的多功能的气缸装配设备,其特征在于,所述气缸装配模块b(5)包括支撑框架二(43),所述支撑框架二(43)上设有缸体定位块(44)、夹紧定位块(45)、定位块缓存区(47)、螺钉定位块(48)、活塞缓存区(50)、气缸翻转平台(51)和气缸装配区,所述缸体定位块(44)和笔形气缸三(46)分别固定于支撑框架二(43)上、夹紧定位块(45)与笔形气缸三(46)固定,笔形气缸三(46)带动夹紧定位块(45)夹紧装配气缸于缸体定位块(44)。
8.根据权利要求1所述的多功能的气缸装配设备,其特征在于,所述缓冲接驳单元(6)包括接驳支撑框架(52)、传输带(53)以及托盘(54),所述托盘(54)放于传输带(53)上,所述托盘(54)上用于放置活塞(49)、缸体(58)、已装配完的气缸以及用于运送装配完的气缸。
9.根据权利要求1所述的多功能的气缸装配设备,其特征在于,所述基础台架(1)设有触摸屏组件单元(7),所述触摸屏组件单元(7)由触摸屏(55)、按钮(56)以及触摸屏支架(57)组成。
10.根据权利要求1所述的多功能的气缸装配设备,其特征在于,所述工作台两侧采用双开门,并设置有散热风机(13),所述工作台上面四周安装有机玻璃。
技术总结
本发明公开了一种多功能的气缸装配设备,包括:基础台架,所述基础台架设有工作台,所述工作台上设有机器人组件、快换抓手库、气缸装配模块A、气缸装配模块B和缓冲接驳单元;所述机器人组件包括由机器人底座、机器人和抓手工装,所述机器人设于机器人底座上,所述机器人底座与工作台固定,所述抓手工装设于机器人的执行端;所述快换抓手库包括与抓手工装配合的子抓手及用于安装子抓手的安装支架;所述气缸装配模块A和气缸装配模块B位于机器人侧部,用于将机器人提供气缸装配部件进行装配;所述缓冲接驳单元用于运送缸体、活塞以及已装配完的气缸。
技术研发人员:郭敏,刘蔚钊,王新
受保护的技术使用者:南京康尼电气技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!