一种新型桥桁架焊接机器人的制作方法
本发明属于焊接,具体涉及一种新型桥桁架焊接机器人。
背景技术:
1、桁架构件具有结构简单、运输方便、架设快捷、载重量大、互换性好、适应性强的特点,广泛应用于公路、铁路、市政、建筑、水利建设项目等现场施工作业,桁架构件也是桁架桥的主要承重构件,现阶段,桁架桥的建设过程中,需要对桁架构件连接节点进行焊接,而对桁架构件连接节点焊接的方式主要依赖人工焊接,焊接精度不好控制,同时焊接效率也不高,从而影响了桥梁主体的稳定性。
2、经检索,中国专利cn217913522u公开了一种大跨度拱形钢结构桁架桥节点焊接装置,包括焊机、连接管和第一腔体,所述焊机通过连接管固定连接有焊枪,所述焊枪上固定安装有进气罩,所述焊机的一侧面开设有第二腔体,所述第二腔体对应的两侧壁之间固定安装有隔板,所述隔板的顶板上固定安装有过滤腔体,所述过滤腔体对应的两侧板之间固定安装有光触媒滤网;但是现有焊接装置的焊枪可调节性低,且操作时只能在施工现场地面对桁架构件进行节点焊接,无法满足高空或悬空节点焊接作业,基于此,我们提出了一种新型桥桁架焊接机器人。
技术实现思路
1、本发明的目的在于针对现有技术的不足之处,提供一种新型桥桁架焊接机器人,解决了现有焊接装置的焊枪可调节性低,且操作时只能在施工现场地面对桁架构件进行节点焊接,无法满足高空或悬空节点焊接作业的问题。
2、本发明是这样实现的,一种新型桥桁架焊接机器人,所述新型桥桁架焊接机器人包括:
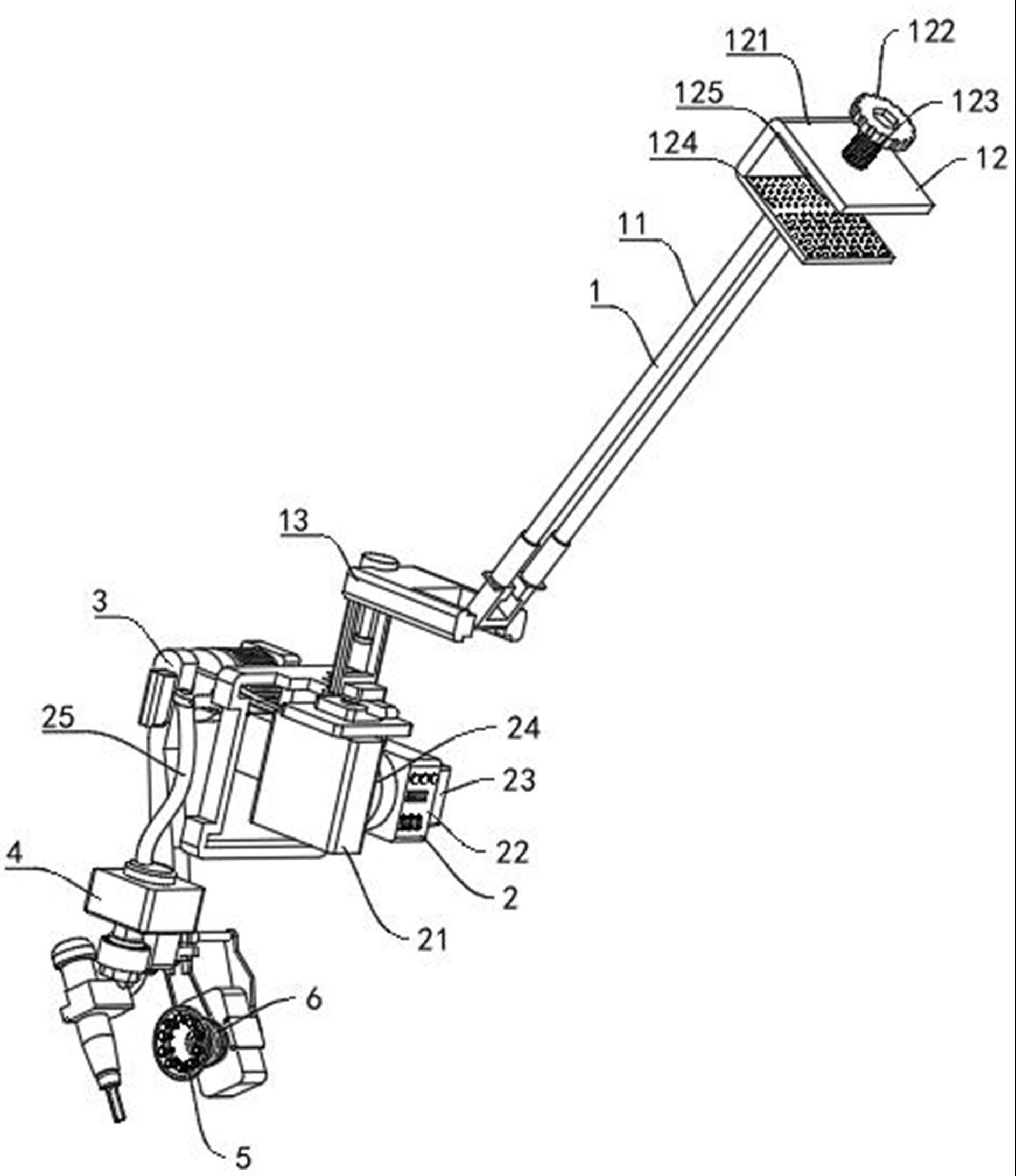
3、焊接承托机构,其中,所述焊接承托机构包括焊接承托架、承托安装部以及与焊接承托架连接的承托自适应部;
4、与焊接承托机构连接的机器人主体,焊接承托机构用于承托所述机器人主体;
5、其中,所述机器人主体包括:
6、焊接控制组件,用于控制机器人主体运行;
7、设置在所述焊接控制组件一侧的位置调节组件,所述位置调节组件用于调节焊接位置,以及
8、与位置调节组件连接的焊接执行组件,所述焊接执行组件包括连续点焊部、执行驱动机构以及辅助净化机构,所述连续点焊部与执行驱动机构连接,执行驱动机构安装在位置调节组件上,执行驱动机构用于驱动连续点焊部执行桥桁架焊接工作,并驱动所述辅助净化机构运行,保证焊接环境。
9、优选地,所述承托自适应部包括:
10、承托自适应座,所述承托自适应座与焊接承托架的一端可拆卸连接,且承托自适应座用于辅助所述机器人主体的安装,承托自适应座上设置有多组防滑件;
11、承托调节杆,所述承托调节杆贯穿所述承托自适应座,且与所述承托自适应座之间通过螺纹连接,承托调节杆的一端固定连接有承托调节件;
12、与承托调节杆一端连接的自适应压板,自适应压板上也安装有多组防滑件。
13、优选地,所述焊接控制组件包括:
14、远程控制器,所述远程控制器固定安装在所述承托安装部上;
15、设置在所述远程控制器一侧的自动送丝机;
16、焊接主机,与所述承托安装部可拆卸连接,用于控制所述焊接执行组件运行,以及
17、设置在所述焊接主机一侧的焊接供电部,以及
18、可伸缩线缆管,所述可伸缩线缆管包裹有焊接线丝以及供电导线;
19、其中,所述远程控制器分别与自动送丝机、焊接主机以及焊接供电部电性连接。
20、优选地,所述位置调节组件包括:
21、第一调节件,所述第一调节件固定安装在所述承托安装部内;
22、与第一调节件输出端固定连接的第一机器臂;
23、安装在所述第一机器臂上的第二调节件,所述第二调节件的输出端固定连接有第二机器臂,第二机器臂用于承托所述焊接执行组件。
24、优选地,所述连续点焊部包括:
25、连续焊接头,所述连续焊接头可拆卸安装在焊接卡座上;
26、与焊接卡座固定连接的第三调节件,所述第三调节件固定安装在点焊承托座内,点焊承托座与第二机器臂滑动连接,且固定连接有执行驱动机构;
27、其中,连续焊接头内安装有至少一组点焊枪以及送丝管,点焊枪用于执行桥桁架连接节点的焊接工作。
28、优选地,所述执行驱动机构包括:
29、执行驱动件,所述执行驱动件固定安装在第二机器臂内;
30、与执行驱动件连接的执行传动组,所述执行传动组包括第一齿轮、第二齿轮以及设置在所述第一齿轮一侧的第三齿轮,所述第一齿轮与第三齿轮之间啮合传动,第一齿轮与第二齿轮之间固定连接,第三齿轮转动安装在第二机器臂上;
31、焊接联动组,所述焊接联动组与点焊承托座连接,用于调节所述点焊承托座的位置,实现对节点的连续点焊作业,以及
32、净化联动组,所述净化联动组分别与第三齿轮以及辅助净化机构连接,用于驱动所述辅助净化机构作业,配合所述连续点焊部工作。
33、优选地,所述焊接联动组包括:
34、焊接联动座,所述焊接联动座的一侧固定安装有联动齿条,联动齿条与所述第二齿轮之间啮合传动;
35、与焊接联动座固定连接的焊接升降座,焊接升降座与点焊承托座之间固定连接,焊接升降座内开设有升降导向槽;
36、套设在所述焊接升降座上的焊接套设座,焊接套设座与升降导向槽之间滑动连接,且焊接套设座与第二机器臂之间固定连接。
37、优选地,所述净化联动组包括:
38、第一联动轮,所述第一联动轮设置在第三齿轮的一侧,且与第三齿轮之间通过连杆固定连接;
39、设置在第一联动轮一侧的第二联动轮,所述第二联动轮与第一联动轮之间通过联动传送件连接,且第二联动轮与辅助净化机构连接。
40、优选地,所述辅助净化机构包括:
41、辅助净化座,所述辅助净化座用于抽入气体或粉尘的净化过滤处理,且辅助净化座的一侧设置有净化抽风机,辅助净化座固定安装在第二机器臂上;
42、与辅助净化座转动连接的焊接处理部,所述焊接处理部包括进气扰流座,所述进气扰流座与辅助净化座之间贯穿连通,且与辅助净化座之间转动连接,进气扰流座内嵌装有进气扰流件,第二联动轮固定套设在所述进气扰流座上,进气扰流座的一侧固定连通有焊接处理罩。
43、优选地,所述辅助净化机构还包括:
44、至少一组组合式净化部,所述组合式净化部用于焊接过程刺激性气体的异味去除,保证焊接环境;
45、安装在所述组合式净化部内的辅助散热部,所述辅助散热部用于连续点焊部辅助散热。
46、与现有技术相比,本技术实施例主要有以下有益效果:
47、本发明实施例中设置有连续点焊部、执行驱动机构以及辅助净化机构,执行驱动机构能够驱动连续点焊部执行桥桁架焊接工作,并驱动所述辅助净化机构运行,保证焊接环境,采用位置调节组件与执行驱动机构配合工作,实现了对连续点焊部位置的灵活调节,在持续焊接的同时持续净化焊接环境,克服了现有技术焊接装置的焊枪可调节性低以及操作时只能在施工现场地面对桁架构件进行节点焊接,无法满足高空或悬空节点焊接作业的问题。
- 还没有人留言评论。精彩留言会获得点赞!