一种高效高精密装配摄像头与外壳的装配装置及方法与流程
本发明涉及摄像头与外壳装配的,特别是一种高效高精密装配摄像头与外壳的装配装置及方法。
背景技术:
1、某生产型企业的车间的墙壁上通常安装有多个监控器,监控器用于实时拍摄生产设备或生产线的运行情况,并将拍摄的画面传递给监控室内的显示器中,以方便工作人员实时的查看生产设备或生产线的运行情况,进而确保生产顺利进行。
2、某监控器的结构如图1所示,它包括摄像头1和外壳2,摄像头1与外壳2连接,外壳的结构如图2~图3所示,外壳2包括顶部带开口的壳体3,壳体3的左右外侧壁上分别焊接有左侧支撑板4和右侧支撑板5,两个支撑板的顶表面上沿其纵向上均焊接有两个销钉6;摄像头的结构如图4~图5所示,摄像头1包括摄像头模组7和镜头8,镜头8设置于摄像头模组7的顶表面上,摄像头模组7的左右外侧壁上分别焊接有左侧安装板9和右侧安装板10,两个安装板的顶表面上沿其纵向上均开设有两个销孔11,销孔11的孔径与销钉6的直径相等;其中,摄像头1的摄像头模组7由上往下嵌入于外壳2的开口内,左侧安装板9上的两个销孔11分别套设于左侧支撑板4上的两个销钉6上,同时右侧安装板10上的两个销孔11分别套设于右侧支撑板5上的两个销钉6上,四个销钉6的顶部均成型有端头12,端头12抵压在安装板的顶表面上,以将安装板固定在支撑板上,进而实现的摄像头1与外壳2的装配。
3、某监控器装配车间将摄像头1与外壳2装配于一体的操作方法是:
4、s1、工人先从料筐a内取出一个外壳2,而后将外壳2定位于压力机的工装台上,如图6所示;然后工人从料筐b内取出一个摄像头1,工人将摄像头1的左侧安装板9的两个销孔11分别套设于左侧支撑板4的两个销钉6上,同时工人将摄像头1的右侧安装板10的两个销孔11分别套设在右侧支撑板5的两个销钉6上,从而实现摄像头1与外壳2的定位,如图7所示,此时摄像头1的摄像头模组7处于外壳2内,且摄像头1的镜头8朝上;
5、s2、工人控制压力机的两个液压油缸13的活塞杆向下伸出,活塞杆带动压头14向下运动,左侧的液压油缸13的压头14向下压左侧的两个销钉6的顶部,以成型出端头12,如图8~图9所示,端头12抵压在左侧安装板9的顶表面上,此时左侧安装板9与左侧支撑板4固定于一体,同时右侧的液压油缸13的压头14向下压右侧的两个销钉6的顶部,以成型出端头12,端头12抵压在右侧安装板10的顶表面上,此时右侧安装板10与右侧支撑板5固定于一体,从而最终实现了外壳2与摄像头1的装配,即得到所需产品,产品的结构如图1所示;
6、s3、装配后,控制压力机的两个液压油缸13的活塞杆缩回,然后工人将装配而成的产品周转到后段的工序中;
7、s4、重复步骤s1~s2的操作,即可连续地实现多个摄像头1与外壳2的装配,从而得到多个产品。
8、然而,装配车间内的操作方法虽然能够实现摄像头1与外壳2的装配,但是随着产品的需求量增大,这种操作方法反应出以下技术缺陷:
9、i、在步骤s1中,需要人工从料筐a内取出外壳2,且从料筐b内取出摄像头1,同时还要将摄像头1的左侧安装板9的两个销孔11套设在左侧支撑板4的两个销钉6上,将摄像头1的右侧安装板10的两个销孔11套设在右侧支撑板5的两个销钉6上,才能实现摄像头1与外壳2的定位,这无疑是增加了工人的工作强度,同时还降低了摄像头1与外壳2的装配效率。
10、此外,在步骤s3中,当装配出多个产品后,还需要工人将产品周转到后段工序中,这无疑是耽误了工人的装配时间,进一步的降低了摄像头1与外壳2的装配效率。
11、ii、在步骤s2中,两个压头14在压销钉6的顶端部时,作用力传递给了左侧支撑板4和右侧支撑板5,从而导致左侧支撑板4和右侧支撑板5均被压变形,从而极大的降低了摄像头1与外壳2的装配质量,存在装配精度低的技术缺陷。因此,亟需一种极大提高摄像头与外壳装配效率、极大提高装配精度的装配装置及方法。
技术实现思路
1、本发明的目的在于克服现有技术的缺点,提供一种极大提高摄像头与外壳装配效率、极大提高装配精度、自动化程度高的高效高精密装配摄像头与外壳的装配装置及方法。
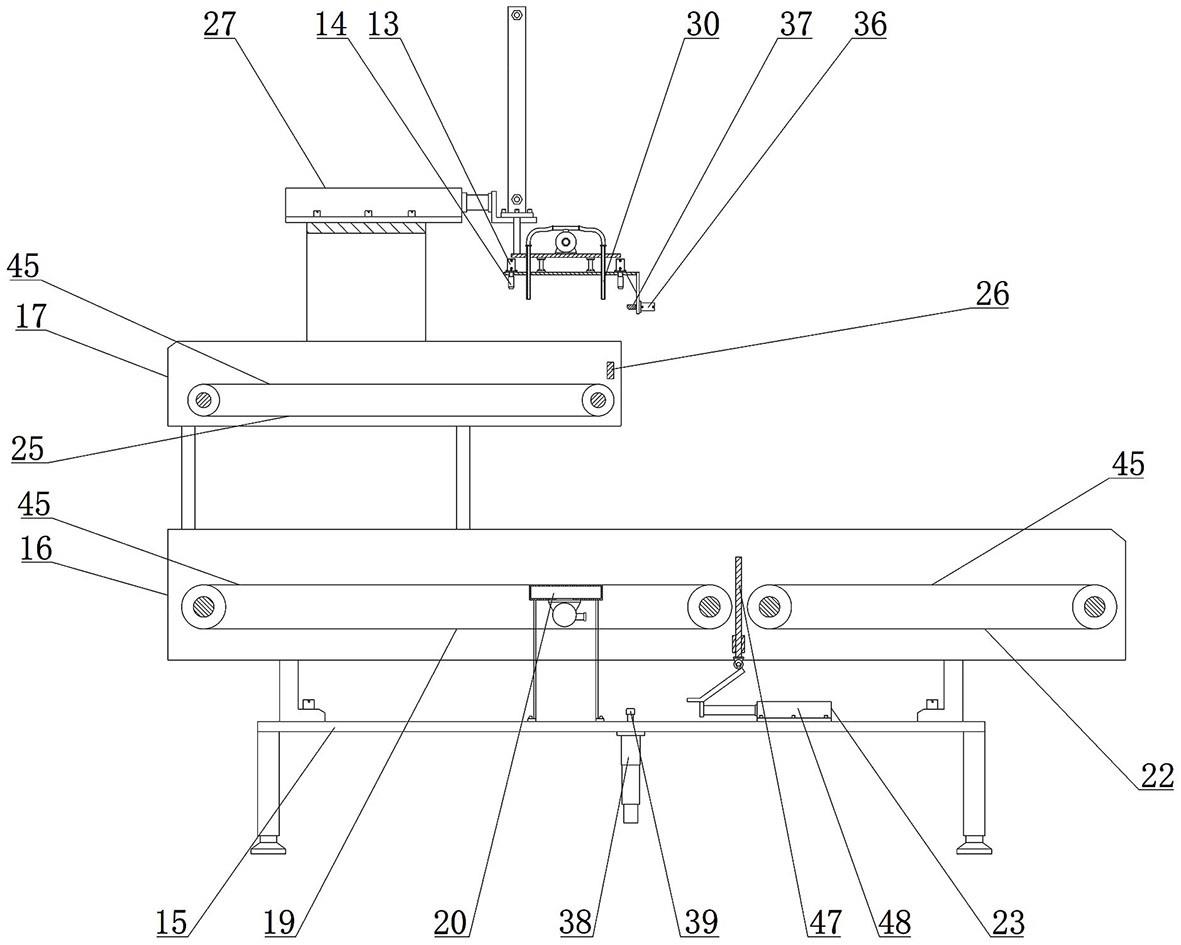
2、本发明的目的通过以下技术方案来实现:一种高效高精密装配摄像头与外壳的装配装置,它包括从下往上顺次设置的工作台、外壳输送装置和摄像头输送装置,所述外壳输送装置包括两个前后设置的护板i,两个护板i之间设置有两个皮带输送机构,两个皮带输送机构之间设置有固设于工作台上的真空盘,真空盘与真空泵i连接,真空盘的顶表面与皮带输送机构的皮带的顶表面平齐,两个护板i之间还设置有平带输送机i,平带输送机i的平带与皮带输送机构的皮带的顶表面相平齐;
3、所述工作台上且位于平带输送机i与皮带输送机构之间设置有用于阻挡外壳的阻挡机构,阻挡机构设置于真空盘的右侧,阻挡机构的升降板延伸于两个皮带输送机构的皮带所围成区域的上方;
4、所述摄像头输送装置包括两个前后设置的护板ii,两个护板ii之间设置有平带输送机ii,平带输送机ii的平带的右侧设置有焊接于两个护板ii之间的挡板,两个护板ii之间还设置有端头成型机构;
5、所述端头成型机构包括龙门架、进给油缸、升降油缸和真空管,所述龙门架架设于两个护板ii之间,进给油缸固设于龙门架上,进给油缸活塞杆的作用端上固设有连接板,升降油缸固设于连接板的顶表面上,升降油缸的活塞杆贯穿连接板设置,且延伸端上固设有顶板,顶板的底部固连有底板,底板与顶板之间固设有两根贯穿底板设置的真空管,两根真空管的顶端口均经软管均与真空泵ii连接,真空泵ii固设于顶板顶部,两根真空管的外侧均固设有液压油缸,液压油缸的活塞杆贯穿底板设置,且延伸端上固设有纵向设置的压头;所述底板右端部的底表面上固设有立板,立板的右端面上固设有水平油缸,水平油缸的活塞杆贯穿立板设置,且延伸端上固设有右支撑台;
6、该装配装置还包括固设于工作台底表面上且位于真空盘和升降板之间的多级伸缩油缸,多级伸缩油缸的活塞杆贯穿工作台设置,且延伸端上固设有左支撑台。
7、所述真空盘的顶表面上开设有多个与其内腔相连通的真空小孔,所述真空泵i固设于真空盘的底表面上,真空泵i与真空盘的内腔连通,真空盘的底表面与工作台之间固连有支架,以实现真空盘的固定。
8、位于两个护板i之间的两个皮带输送机构前后对称设置,皮带输送机构包括旋转安装于两个护板i之间的主动轴和从动轴,主动轴上安装有两个主动带轮,从动轴上安装有两个从动带轮,相对立的主动带轮和从动带轮之间安装有皮带,护板i的后侧壁上固设有伺服电机i,伺服电机i与主动轴的一端连接。
9、所述平带输送机i与平带输送机ii的结构相同,平带输送机ii包括旋转安装于两个护板ii的主动辊筒和从动辊筒,主动辊筒与从动辊筒之间安装有平带,护板ii的后侧壁上固设有伺服电机ii,伺服电机ii的输出轴与主动辊筒的一端连接。
10、所述护板i与工作台的台面之间、护板i与护板ii之间均固设有连接架,两个护板i之间的纵向宽度与外壳的纵向宽度相等,两个护板ii之间的纵向宽度与摄像头的摄像头模组的纵向宽度相等。
11、所述的工作台的底表面上固设有多根支撑于地面上的支撑腿。
12、所述的阻挡机构包括升降板、固设于工作台台面上的推送油缸、固设于两个护板i之间的导向座,推送油缸活塞杆的作用端上焊接有弯折板,升降板滑动安装于导向座内,升降板的底部旋转安装有支撑于弯折板下端部的滚轮。
13、该装配装置还包括控制器,所述控制器与进给油缸的电磁阀、升降油缸的电磁阀、液压油缸的电磁阀、伺服电机i、伺服电机ii、真空泵i、真空泵ii、推送油缸的电磁阀经信号线电连接。
14、一种高效高精密装配摄像头与外壳的装配方法,它包括以下步骤:
15、s1、外壳的上料:控制伺服电机i启动,伺服电机i带动主动轴转动,主动轴带动两个主动带轮做顺时针旋转,两个主动带轮分别带动两个皮带做顺时针旋转;随后工人将多个外壳依次放入到两个护板i所围成区域内,两个皮带带动外壳向右运动,当位于首端部处的外壳a被升降板挡住后,后续的外壳依次排列在两个护板i之间,从而实现了外壳的上料;
16、s2、摄像头的上料:控制平带输送机ii的伺服电机ii启动,伺服电机ii带动主动辊筒做顺时针旋转,主动辊筒带动平带做顺时针旋转;随后工人将多个摄像头依次放入到两个护板ii所围成的区域内,平带带动摄像头向右运动,当位于首端部处的摄像头a被挡板挡住后,后续的摄像头依次排列在两个护板ii之间,从而实现了摄像头的上料;
17、s3、摄像头a与外壳a的装配,其具体操作步骤为:
18、s31、摄像头a的抓取:工人控制升降油缸的活塞杆向下伸出,活塞杆带动顶板向下运动,顶板带动底板向下运动,底板带动真空泵ii、真空管、水平油缸、右支撑台、两个液压油缸和两个压头同步向下运动,当升降油缸的活塞杆伸出一段距离后,两个真空管的底表面均接触到摄像头a的摄像头模组的顶表面上;随后控制真空泵ii启动,真空泵ii对真空管抽真空,在负压下,摄像头a吸附在真空管上,从而实现了摄像头a的抓取;
19、s32、摄像头a的提升:控制升降油缸的活塞杆向上缩回,活塞杆带动顶板向上运动,顶板带动底板向上运动,底板带动真空泵ii、真空管、水平油缸、右支撑台、两个液压油缸和两个压头同步向上运动,真空管带动被吸附的摄像头a同步向上运动,当升降油缸的活塞杆完全缩回后,即可实现摄像头a的提升;
20、s33、摄像头a与外壳a的定位:控制进给油缸的活塞杆向右伸出,活塞杆带动连接板向右做直线运动,连接板带动升降油缸、顶板、底板、真空管、水平油缸、右支撑台和两个液压油缸和两个压头同步向右做直线运动,当进给油缸的活塞杆完全伸出后,控制器控制进给油缸关闭,此时摄像头a的左侧安装板位于外壳a的左侧支撑板的正上方,摄像头a的右侧安装板位于外壳a的右侧支撑板的正上方;然后,控制升降油缸的活塞杆向下伸出,活塞杆带动顶板向下运动,顶板带动底板向下运动,底板带动真空泵ii、真空管、水平油缸、右支撑台、两个液压油缸和两个压头同步向下运动,当升降油缸的活塞杆完全伸出后,即可实现摄像头a与外壳a的定位,此时摄像头的摄像头模组由上往下嵌入于外壳的开口内,左侧安装板上的两个销孔分别套设于左侧支撑板上的两个销钉上,同时右侧安装板上的两个销孔分别套设于右侧支撑板上的两个销钉上;
21、s34、定位后,先控制真空泵ii关闭,真空管不再吸附摄像头a,随后工人控制多级伸缩油缸的活塞杆向上伸出,活塞杆带动左支撑台向上运动,左支撑台支撑在外壳a的左侧支撑板的底表面上,然后工人控制水平油缸的活塞杆向左伸出,活塞杆带动右支撑台向左运动,右支撑台刚好支撑于外壳a的右侧支撑板的底表面上;控制两个液压油缸的活塞杆向下伸出,活塞杆带动压头向下运动,左侧的压头向下压在左侧支撑板上的两个销钉的顶部,以在销钉的顶部成型出端头,同时右侧的压头向下压在右侧支撑板上的两个销钉的顶部,以在销钉的顶部成型出端头,从而最终实现了摄像头a与外壳a的装配,进而得到所需的产品;
22、s4、装配出的产品后,先控制多级伸缩油缸的活塞杆向下缩回,活塞杆带动左支撑台复位,随后控制水平油缸的活塞杆向右缩回,活塞杆带动右支撑台复位,控制升降油缸活塞杆向上缩回,而后控制进给油缸的活塞杆向左缩回,从而使真空管运动到下一个抓取工位;
23、s5、产品的周转,其具体操作步骤为:
24、s51、工人控制真空泵i启动,真空泵i启动,真空泵i对真空盘和真空小孔抽真空,在负压下,位于产品左侧的外壳被吸附固定在真空盘上;
25、s52、工人控制推送油缸的活塞杆向右缩回,活塞杆带动弯折板向右运动,在升降板的自重下,升降板沿着弯折板的斜面向下做直线运动,当升降板与产品分离后,产品运动到平带输送机i的平带上,平带将产品输送到后段的工序中,从而实现了产品的周转;
26、s6、当第一个产品周转后,工人控制推送油缸的活塞杆向左伸出,活塞杆带动弯折板向左运动,升降板沿着弯折板的斜面向上做直线运动,当推送油缸的活塞杆完全伸出后,控制真空泵i关闭,在两个皮带的带动下,真空盘上的外壳继续向右运动,而后被升降板挡住,重复步骤s3的操作,即可实现第二个摄像头与外壳的装配,从而得到第二个产品;
27、s7、如此重复步骤s3~s6的操作,即可连续地实现多个摄像头与外壳的装配,从而得到多个产品。
28、本发明具有以下优点:本发明极大提高摄像头与外壳装配效率、极大提高装配精度、自动化程度高。
- 还没有人留言评论。精彩留言会获得点赞!