一种动臂全自动焊接装置的制作方法
本发明涉及机械焊接,具体的说是一种动臂全自动焊接装置。
背景技术:
1、动臂,是指挖掘机上的一种装配零件,通常也叫大臂,主要作用是用来支配挖斗的挖掘、装车等动作;因为臂长整体较长,所以俗称为大臂,其术语称作动臂,而动臂在安装过程中,需要多个不同大小的销轴,这些销轴零件在实际使用中,一般都需要事先对其进行合适的焊接加工,以改善零件的工况,这些大都需要相应的动臂自动焊接装置来完成。
2、然而,现有的动臂全自动焊接装置在实际操作中,一般都是采用传统的夹持组件来直接对动臂上的销轴零件进行夹持,这样在持续的夹持过程中,容易出现销轴零件各处受力不均的情况,甚至产生夹持的松动;且在焊接时,根据不同情况有时还需对零件进行位置调整,操作比较繁琐;此外,焊接过程中,不可避免的会产生一些焊渣,这些焊渣会直接掉落至工作台上,后续的清洁工作较麻烦;同时,焊接过程还会产生一些烟雾,不但对工作环境造成污染,更容易令操作人员产生不适。
技术实现思路
1、针对现有技术中的问题,本发明提供了一种动臂全自动焊接装置。
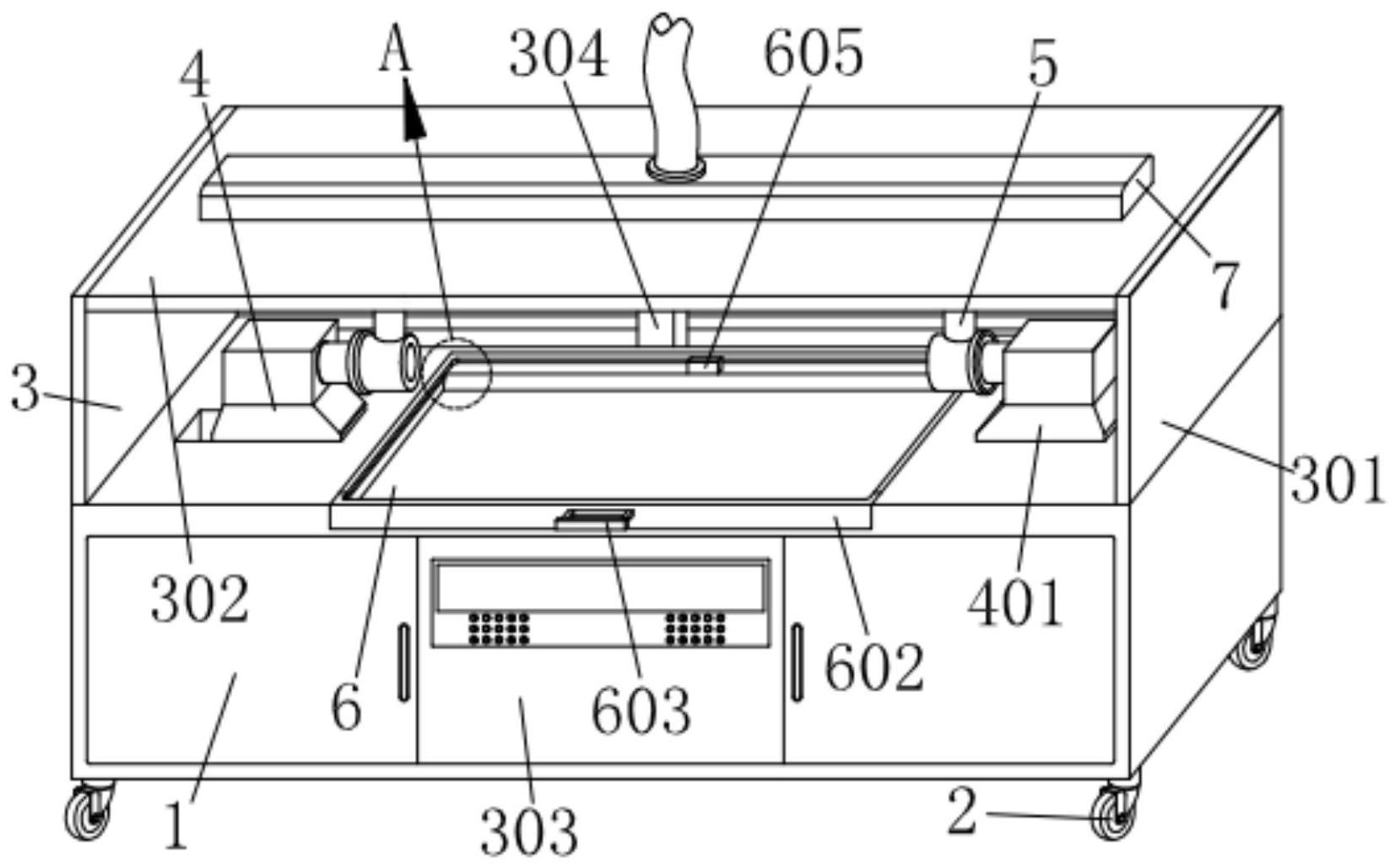
2、本发明解决其技术问题所采用的技术方案是:一种动臂全自动焊接装置,包括安置台,所述安置台上安装有多个滚轮,所述安置台上设有操作机构,所述安置台上设有限位机构,所述限位机构上设有夹持机构,所述安置台上设有收集机构,所述操作机构上设有抽吸机构;
3、所述限位机构包括滑块,所述安置台上滑动连接有两个滑块,所述滑块上固定连接有安置块,所述安置块内部设有电机,所述电机的输出端上连接有限位框,所述限位框转动连接于安置块,所述安置台的内部设有两个第一电动推杆,两个所述第一电动推杆的伸长端分别连接于一个滑块,且所述滑块的截面呈矩形状;
4、所述夹持机构包括固定块,所述限位框上固定连接有固定块,所述固定块内部设有第二电动推杆,所述第二电动推杆的伸长端上固定连接有推块,所述推块滑动连接于固定块的内部,所述限位框内部滑动连接有受压块,所述受压块上固定连接有夹块,所述夹块滑动连接于限位框上,所述限位框内部设有通槽,所述通槽连通于推块所处的内腔和受压块所处的内腔,所述推块和受压块的一侧都呈斜面状,且所述通槽的整体呈环槽状,多个所述夹块在限位框内部呈环形阵列式分布,且所述夹块上固定连接有夹齿,所述夹块上固定连接有两根限位杆,所述限位杆滑动连接于限位框内部,且所述限位杆上缠绕有弹簧,所述弹簧的一端固定连接于限位杆。
5、具体的,所述操作机构包括立板,所述安置台上固定连接有两块立板,两块所述立板上共同固定连接有顶板,所述安置台的一侧设有操控面板主体,所述安置台上设有焊接头主体,所述焊接头主体设于安置台顶部的一侧。
6、具体的,所述收集机构包括收集框,所述安置台上滑动连接有收集框,所述收集框上安装有扣盖,所述扣盖上固定连接有把手,所述收集框的内部滑动连接有清洁块,所述清洁块上固定连接有拉块。
7、具体的,所述抽吸机构包括排气罩,所述顶板上固定连接有排气罩,所述排气罩的顶部固定连接有排管,所述排气罩的底部固定连接有收集罩,所述收集罩朝向收集框。
8、本发明的有益效果是:
9、(1)本发明所述的一种动臂全自动焊接装置,使用时,将限位机构设于安置台上,将夹持机构设于限位机构上,通过限位机构和夹持机构的配合,从而方便对动臂的销轴零件进行全方位的夹持限位,令零件的受力更加均匀,减少夹持过程产生松动的情况,同时,也便于随时对待加工的销轴零件进行旋转调节,令焊接过程更加的方便;即:使用时,可将需要加工的销轴零件的一端先安置于一个限位框的内部,接着,通过第一电动推杆,对滑块进行推动,进而带动安置块和其上的限位框一起移动,直至销轴零件的另一端进入另一个限位框内部,然后,再将第二电动推杆接通电源,则第二电动推杆对推块进行推动,随着推块的移动,就会对滑动腔中的气压进行调节,随即作用至相应的受压块上,而进一步的,通过通槽,方便同时作用于多个受压块,而受压块受压产生移动,随即带动夹块和夹齿一起移动,限位杆随即产生移动,则弹簧同时被压缩,直至令夹块上的夹齿抵触于销轴零件,从而方便对动臂的销轴零件进行全方位的夹持限位,令零件的受力更加均匀,减少夹持过程产生松动的情况;同时,通过电机,从而方便带动限位框一起转动,进而带动其上夹持的销轴零件一起转动,从而便于随时对待加工的销轴零件进行旋转调节,令焊接过程更加的方便。
10、(2)本发明所述的一种动臂全自动焊接装置,使用时,将收集机构设于安置台上,通过收集机构,从而方便对焊接过程中产生的焊渣碎屑进行统一的清洁处理,避免焊渣直接掉落掉工作台上,方便后续的清洁工作;即:实际焊接过程中,当出现一些焊渣时,这些焊渣会随之掉落到收集框的内部,待操作一段时间后,使用者可通过把手将收集框抽出,接着将扣盖打开,然后手动握住拉块,对清洁块进行拉动,则随着清洁块的移动,就会方便对存储于收集框内部的焊渣进行统一的清扫,从而方便对焊接过程中产生的焊渣碎屑进行统一的清洁处理,避免焊渣直接掉落掉工作台上,方便后续的清洁工作。
11、(3)本发明所述的一种动臂全自动焊接装置,使用时,将抽吸机构设于操作机构上,通过抽吸机构,从而方便对焊接过程中产生的烟雾进行抽吸,避免对工作环境造成污染,更减少了操作人员产生的不适感;即:实际操作时,还可将排管的端部连接于相应的抽吸装置上,接着,通过相应的抽吸装置,配合排气罩和收集罩,实现对焊接时产生的烟雾进行抽吸,从而方便对焊接过程中产生的烟雾进行抽吸,避免对工作环境造成污染,更减少了操作人员产生的不适感。
技术特征:
1.一种动臂全自动焊接装置,其特征在于,包括安置台(1),所述安置台(1)上安装有多个滚轮(2),所述安置台(1)上设有操作机构(3),所述安置台(1)上设有限位机构(4),所述限位机构(4)上设有夹持机构(5),所述安置台(1)上设有收集机构(6),所述操作机构(3)上设有抽吸机构(7);
2.根据权利要求1所述的一种动臂全自动焊接装置,其特征在于:所述安置台(1)的内部设有两个第一电动推杆(403),两个所述第一电动推杆(403)的伸长端分别连接于一个滑块(401),且所述滑块(401)的截面呈矩形状。
3.根据权利要求1所述的一种动臂全自动焊接装置,其特征在于:所述推块(503)和受压块(504)的一侧都呈斜面状,且所述通槽(507)的整体呈环槽状。
4.根据权利要求1所述的一种动臂全自动焊接装置,其特征在于:多个所述夹块(505)在限位框(405)内部呈环形阵列式分布,且所述夹块(505)上固定连接有夹齿(506)。
5.根据权利要求4所述的一种动臂全自动焊接装置,其特征在于:所述夹块(505)上固定连接有两根限位杆(508),所述限位杆(508)滑动连接于限位框(405)内部,且所述限位杆(508)上缠绕有弹簧(509),所述弹簧(509)的一端固定连接于限位杆(508)。
6.根据权利要求1所述的一种动臂全自动焊接装置,其特征在于:所述操作机构(3)包括立板(301),所述安置台(1)上固定连接有两块立板(301),两块所述立板(301)上共同固定连接有顶板(302),所述安置台(1)的一侧设有操控面板主体(303)。
7.根据权利要求1所述的一种动臂全自动焊接装置,其特征在于:所述安置台(1)上设有焊接头主体(304),所述焊接头主体(304)设于安置台(1)顶部的一侧。
8.根据权利要求6所述的一种动臂全自动焊接装置,其特征在于:所述收集机构(6)包括收集框(601),所述安置台(1)上滑动连接有收集框(601),所述收集框(601)上安装有扣盖(602),所述扣盖(602)上固定连接有把手(603)。
9.根据权利要求8所述的一种动臂全自动焊接装置,其特征在于:所述收集框(601)的内部滑动连接有清洁块(604),所述清洁块(604)上固定连接有拉块(605)。
10.根据权利要求9所述的一种动臂全自动焊接装置,其特征在于:所述抽吸机构(7)包括排气罩(701),所述顶板(302)上固定连接有排气罩(701),所述排气罩(701)的顶部固定连接有排管(703),所述排气罩(701)的底部固定连接有收集罩(702),所述收集罩(702)朝向收集框(601)。
技术总结
本发明涉及机械焊接技术领域,具体的说是一种动臂全自动焊接装置,包括安置台,所述安置台上设有操作机构,所述安置台上设有限位机构,所述限位机构上设有夹持机构,所述安置台上设有收集机构,所述操作机构上设有抽吸机构;通过限位机构和夹持机构,方便对动臂的销轴零件进行全方位的夹持限位,令零件的受力更加均匀,减少夹持过程产生松动的情况,同时,也便于随时对待加工的销轴零件进行旋转调节;通过收集机构,方便对焊接过程中产生的焊渣碎屑进行统一的清洁处理,避免焊渣直接掉落掉工作台上;通过抽吸机构,方便对焊接过程中产生的烟雾进行抽吸,避免对工作环境造成污染,更减少了操作人员产生的不适感。
技术研发人员:张士磊,房北方
受保护的技术使用者:山东硕诚机械有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!