一种龙门式智能焊接机器人工作站的制作方法
本技术属于焊接机器人,具体涉及一种龙门式智能焊接机器人工作站。
背景技术:
1、焊接是制造业中必不可少的一种加工工艺方法,在汽车制造、船舶制造、工程机械、桥梁建筑等行业中占有重要地位,目前焊接作业主要以人工为主,随着许多焊接结构件的焊接精度和要求越来越高,一般工人已难以胜任,另外,焊接时产生的电弧、火花、烟雾等对人体会造成不可逆的损害、人口老龄化程度加快的不确定性,使得部分行业出现焊接招工难、产能效率过低等问题。此外,焊接制造工艺的复杂性、劳动强度、产品质量、批量要求等,使得焊接工艺对自动化、机械化的要求极为迫切,实现机器人自动焊接代替人工操作已成为行业发展的必然趋势。目前行业内出现部分龙门焊接工作站的应用案例,但是均采用人工示教的方式实现,需要进行大量人工示教作业,对于不同类型的工件需要反复示教调节,工人劳动强度高、效率低,未能有效解决产能效率低的问题。
技术实现思路
1、为了解决现有技术中存在的问题,本实用新型提供一种龙门式智能焊接机器人工作站,该实用新型可使焊接机器人覆盖范围广、柔性自动化程度高、免人工示教、免工装夹具,具有高效率、高度无人化、精准定位等特点。
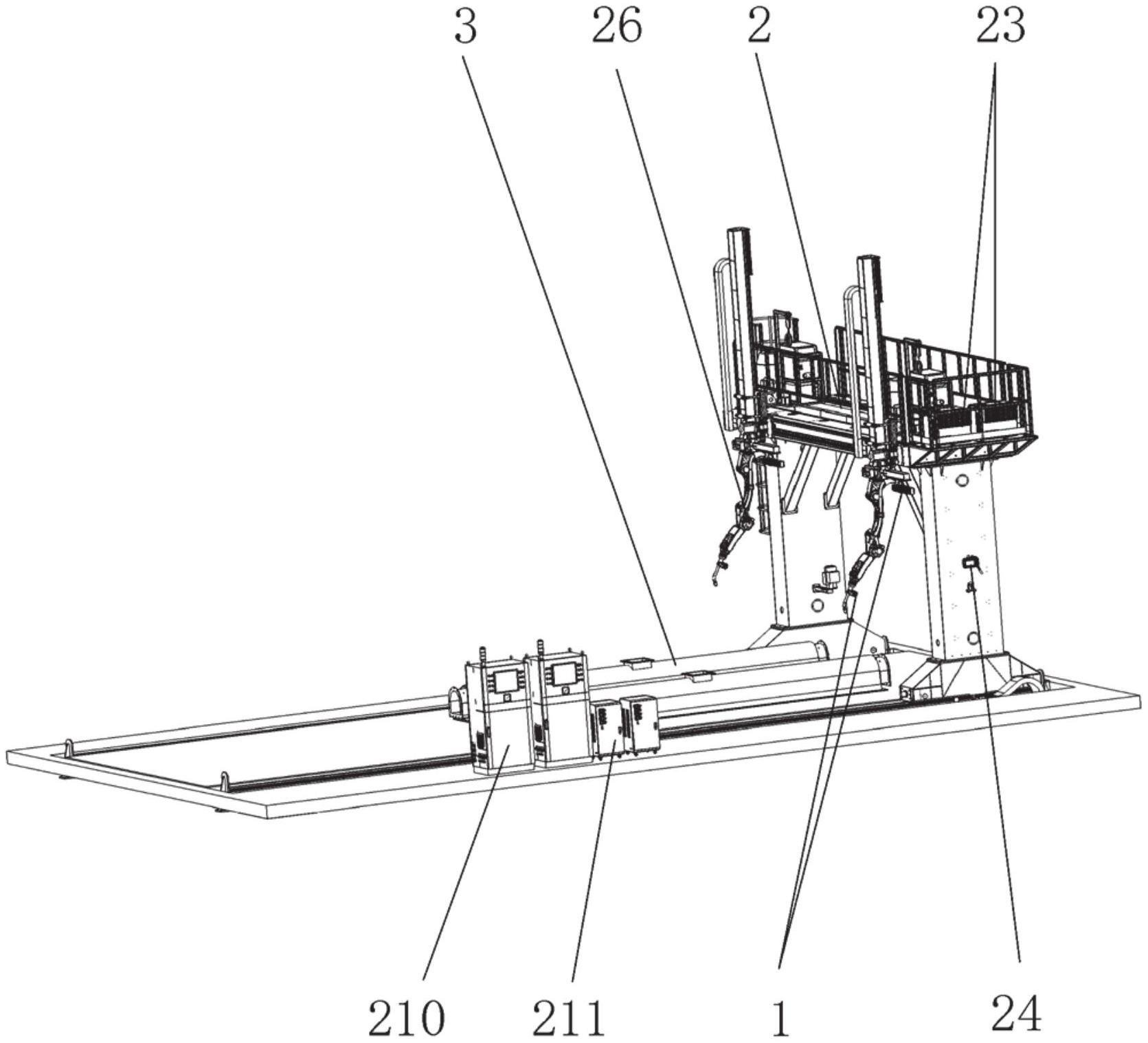
2、为实现上述目的,本实用新型提供如下技术方案:一种龙门式智能焊接机器人工作站,包括:视觉系统、龙门焊接机器人系统和工作站控制系统,其中龙门焊接机器人系统包括三轴龙门、设置在三轴龙门上的焊接机器人,视觉系统包括全局视觉相机、面阵传感器,全局视觉相机设置在三轴龙门上,面阵传感器设置在焊接机器人上,工作站控制系统用于控制全局视觉相机(11)、面阵传感器(13)进行拍照获取待焊接大型复杂工件及焊缝的位置和姿态信息,并依据待焊接大型复杂工件及焊缝的位置和姿态信息控制三轴龙门(22)和焊接机器人的移动以及焊接机器人的焊接。
3、进一步的,所述全局视觉相机通过全局视觉相机固定架安装在焊接机器人一侧的三轴龙门上,所述面阵传感器通过面阵传感器转接支架和夹紧块设置在焊接机器人的焊枪的枪颈上,所述面阵传感器转接支架可以实现面阵传感器的角度调节,调节范围为-30°~+30°。
4、进一步的,所述三轴龙门包括x轴移动装置、z轴移动装置、y轴移动装置,其中,两个x轴移动装置平行间隔设置在地面上,每一x轴移动装置上均设置有一龙门立柱,两个龙门立柱的顶部通过龙门走台连接,龙门走台面向待焊接大型复杂工件的一侧水平设置有y轴移动装置,y轴移动装置上竖直设置有两个z轴移动装置,焊接机器人固定在z轴移动装置的底部。
5、进一步的,所述x轴移动装置包括x轴电机减速器、x轴拖链、轻轨轨道、x轴齿条,其中,x轴电机减速器安装在龙门立柱内部,轻轨轨道固定在地面,x轴齿条安装在轻轨轨道侧端,x轴拖链安装在轻轨轨道一侧,两个龙门立柱安装在轻轨轨道上端,两个龙门立柱通过轻轨轨道和x轴齿条带动实现移动。
6、进一步的,y轴移动装置包括y轴电机减速器、y轴拖链、y轴齿条、y轴导轨、y轴负载板,其中,y轴齿条和y轴导轨安装在龙门走台前侧端,y轴电机减速器固定在y轴负载板侧端,y轴负载板固定在y轴导轨滑块上,z轴移动装置固定在y轴负载板上,y轴拖链固定在龙门走台上。
7、进一步的,z轴移动装置包括z轴电机减速器、z轴拖链、z轴升降装置、机器人负载板,其中,z轴电机减速器固定在z轴升降装置后端,z轴拖链固定在z轴升降装置一侧,z轴升降装置固定在y轴负载板上,机器人负载板固定在z轴升降装置底部用于固定焊接机器人。
8、进一步的,所述z轴升降装置设置两套。
9、进一步的,工作站控制系统包括机器人控制柜、集控柜、稳压器,集控柜中设置有焊接机械臂控制单元、焊接控制单元、三轴龙门控制单元、全局视觉控制单元、面阵传感器控制单元、图像处理单元、路径规划处理单元。
10、进一步的,所述机械臂控制单元用于控制焊接机械臂的多自由度移动,焊接控制单元用于控制焊机电流电压参数的设置及起弧灭弧工作;三轴龙门控制单元用于控制三轴龙门的行走和移动;全局视觉控制单元用于控制全局视觉相机对待焊接大型复杂工件进行拍照,识别定位;面阵传感器控制单元用于控制面阵传感器对待焊接大型复杂工件进行精定位拍照测量;图像处理单元用于对各全局视觉相机和面阵传感器反馈的图像信息进行实时解析处理,并将处理结果反馈至各控制单元中,路径规划处理单元用于根据图像处理单元反馈结果进行焊机机械臂自主路径规划作业及校正。
11、与现有技术相比,本实用新型至少具有以下有益效果:
12、本实用新型利用全局视觉相机和面阵传感器将3d视觉系统和龙门焊接机器人系统结合,通过集控单元控制三轴龙门和焊接机器人带动全局视觉相机和面阵传感器进行自动扫描,可以实现待焊接大型复杂工件及其上焊缝的精确定位识别,避免了大量人工示教的过程,提高了焊接效率、彻底摆脱人工参与的问题,实现了大型复杂工件高度无人化、高效率、高质量、高自动化的焊接,大大降低了人工参与程度,解放了劳动力。
13、本实用新型的龙门采用三轴龙门,实现了焊接机器人全范围的活动,解决了大型复杂工件焊接范围受限的问题,实现了焊接机器人覆盖范围广、活动半径大、免人工示教、柔性化程度高的功能。
技术特征:
1.一种龙门式智能焊接机器人工作站,其特征在于,包括:视觉系统(1)、龙门焊接机器人系统(2)和工作站控制系统,其中龙门焊接机器人系统(2)包括三轴龙门(22)、设置在三轴龙门(22)上的焊接机器人,视觉系统(1)包括全局视觉相机(11)、面阵传感器(13),全局视觉相机(11)设置在三轴龙门(22)上,面阵传感器(13)设置在焊接机器人上,工作站控制系统用于控制全局视觉相机(11)、面阵传感器(13)进行拍照获取待焊接大型复杂工件及焊缝的位置和姿态信息,并依据待焊接大型复杂工件及焊缝的位置和姿态信息控制三轴龙门(22)和焊接机器人的移动以及焊接机器人的焊接。
2.根据权利要求1所述的一种龙门式智能焊接机器人工作站,其特征在于,所述全局视觉相机(11)通过全局视觉相机固定架(12)安装在焊接机器人一侧的三轴龙门上,所述面阵传感器(13)通过面阵传感器转接支架(14)和夹紧块(15)设置在焊接机器人的焊枪(27)的枪颈上,所述面阵传感器转接支架(14)可以实现面阵传感器(13)的角度调节,调节范围为-30°~+30°。
3.根据权利要求1所述的一种龙门式智能焊接机器人工作站,其特征在于,所述三轴龙门(22)包括x轴移动装置、z轴移动装置、y轴移动装置,其中,两个x轴移动装置平行间隔设置在地面上,每一x轴移动装置上均设置有一龙门立柱(2212),两个龙门立柱(2212)的顶部通过龙门走台(2213)连接,龙门走台(2213)面向待焊接大型复杂工件的一侧水平设置有y轴移动装置,y轴移动装置上竖直设置有两个z轴移动装置,焊接机器人固定在z轴移动装置的底部。
4.根据权利要求3所述的一种龙门式智能焊接机器人工作站,其特征在于,所述x轴移动装置包括x轴电机减速器(221)、x轴拖链(224)、轻轨轨道(227)、x轴齿条(228),其中,x轴电机减速器(221)安装在龙门立柱(2212)内部,轻轨轨道(227)固定在地面,x轴齿条(228)安装在轻轨轨道(227)侧端,x轴拖链(224)安装在轻轨轨道(227)一侧,两个龙门立柱(2212)安装在轻轨轨道(227)上端,两个龙门立柱(2212)通过轻轨轨道(227)和x轴齿条(228)带动实现移动。
5.根据权利要求3所述的一种龙门式智能焊接机器人工作站,其特征在于,y轴移动装置包括y轴电机减速器(222)、y轴拖链(225)、y轴齿条(229)、y轴导轨(2210)、y轴负载板(2215),其中,y轴齿条(229)和y轴导轨(2210)安装在龙门走台(2213)前侧端,y轴电机减速器(222)固定在y轴负载板(2215)侧端,y轴负载板(2215)固定在y轴导轨(2210)滑块上,z轴移动装置固定在y轴负载板(2215)上,y轴拖链(225)固定在龙门走台(2213)上。
6.根据权利要求3所述的一种龙门式智能焊接机器人工作站,其特征在于,z轴移动装置包括z轴电机减速器(223)、z轴拖链(226)、z轴升降装置(2211)、机器人负载板(2214),其中,z轴电机减速器(223)固定在z轴升降装置(2211)后端,z轴拖链(226)固定在z轴升降装置(2211)一侧,z轴升降装置(2211)固定在y轴负载板(2215)上,机器人负载板(2214)固定在z轴升降装置(2211)底部用于固定焊接机器人。
7.根据权利要求6所述的一种龙门式智能焊接机器人工作站,其特征在于,所述z轴升降装置设置两套。
8.根据权利要求1所述的一种龙门式智能焊接机器人工作站,其特征在于,工作站控制系统包括机器人控制柜(23)、集控柜(210)、稳压器(211),集控柜(210)中设置有焊接机械臂控制单元、焊接控制单元、三轴龙门控制单元、全局视觉控制单元、面阵传感器控制单元、图像处理单元、路径规划处理单元。
9.根据权利要求8所述的一种龙门式智能焊接机器人工作站,其特征在于,所述机械臂控制单元用于控制焊接机械臂(21)的多自由度移动,焊接控制单元用于控制焊机电流电压参数的设置及起弧灭弧工作;三轴龙门控制单元用于控制三轴龙门(22)的行走和移动;全局视觉控制单元用于控制全局视觉相机(11)对待焊接大型复杂工件进行拍照,识别定位;面阵传感器控制单元用于控制面阵传感器(13)对待焊接大型复杂工件进行精定位拍照测量;图像处理单元用于对各全局视觉相机(11)和面阵传感器(13)反馈的图像信息进行实时解析处理,并将处理结果反馈至各控制单元中,路径规划处理单元用于根据图像处理单元反馈结果进行焊机机械臂自主路径规划作业及校正。
技术总结
本技术公开一种龙门式智能焊接机器人工作站,包括:视觉系统、龙门焊接机器人系统和工作站控制系统,其中龙门焊接机器人系统包括三轴龙门、设置在三轴龙门上的焊接机器人,视觉系统包括全局视觉相机、面阵传感器,全局视觉相机设置在三轴龙门上,面阵传感器设置在焊接机器人上,工作站控制系统用于控制全局视觉相机、面阵传感器拍照获取待焊接大型复杂工件及焊缝的位置和姿态信息控制三轴龙门和焊接机器人的移动以及焊接机器人的焊接。该技术可使焊接机器人覆盖范围广、柔性自动化程度高、免人工示教、免工装夹具,具有高效率、高度无人化、精准定位等特点。
技术研发人员:王汉晨,吴易明,于龙飞,张保军,张妮,土旗,郭帅亮,陈武强
受保护的技术使用者:西安中科光电精密工程有限公司
技术研发日:20230518
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!