轮对除锈机及其除锈方法与流程
1.本发明涉及轮对除锈技术领域,特别是涉及一种轮对除锈机及其除锈方法。
背景技术:
2.铁路车辆锻修时,需对铁路车辆的轮对进行表面磁粉探伤作业。请参阅图1,图1示意出了一实施例的轮对的结构示意图。轮对10包括轮轴11及固定设置于轮轴11上的两个车轮12。根据探伤要求,轮对10上所有的探伤部位均须露出基本金属面。轮对10上的探伤部位包括轴身111、防尘板座112、轴体插入段113与辐板孔部位121。轴身111为轮轴11上对应于两个车轮12之间的部位,对应于图1中的s1段;防尘板座112为轮轴11上位于车轮12外侧并用于装设防尘板,对应于图1中的s2段;轴体插入段113为轮轴11上位于车轮12外侧并用于插入装设到轮对轴承中,对应于图1中的s3段;辐板孔部位121为车轮12的辐板内侧面上对应于辐板孔的部位。为了对轮对10上所有的探伤部位均进行探伤测试,必须对轴身111、防尘板座112、轴体插入段113与辐板孔部位121位置进行外部清洗除锈作业。
3.传统的锻修轮轴清洗除锈工艺,因轮对10的大部分表面防锈清漆附着良好,清洗除锈前需在轮对10表面全部涂抹脱漆剂后再进行清洗作业,清洗除锈作业实际上是除漆作业。脱漆剂具有较强的腐蚀性,挥发性高、毒性大,环境污染严重,尤其在冬季门窗关闭时,锻修库内酸味很浓,易对员工身体健康造成不利影响。
技术实现要素:
4.基于此,有必要克服现有技术的缺陷,提供一种轮对除锈机及其除锈方法,它能够减小环境污染,提高除锈效率与保证除锈效果。
5.其技术方案如下:一种轮对除锈机,所述轮对除锈机包括:第一安装机架,所述第一安装机架用于设于第一除锈工位;轴身除锈组件与板座除锈组件,所述轴身除锈组件与所述板座除锈组件均设置于所述第一安装机架上,所述轴身除锈组件包括第一伺服电机与第一刷,所述第一伺服电机用于驱动所述第一刷转动并对轮对轴身进行除锈操作,所述板座除锈组件包括第二伺服电机与第二刷,所述第二伺服电机用于驱动所述第二刷转动对防尘板座进行除锈操作;第二安装机架,所述第二安装机架用于设于第二除锈工位;辐板除锈组件,所述辐板除锈组件设置于所述第二安装机架上,所述辐板除锈组件包括旋转机构与第三刷,所述旋转机构用于驱动所述第三刷转动并对辐板孔部位进行除锈操作。
6.上述的轮对除锈机对轮对除锈过程中,先将轮对送入到第一除锈工位,由轴身除锈组件的第一刷对轴身进行除锈处理,同时还由板座除锈组件的第二刷对防尘板座进行除锈处理;然后,还将轮对送入到第二除锈工位,还由辐板除锈组件的第三刷对辐板孔部位进行除锈处理,这样便可以分别对轮对的轴身、防尘板座及辐板孔部位进行除锈处理,在除锈处理过程中可以配合用清水对除锈颗粒进行冲洗。如此,一方面,能实现对轮对的各个探伤部位均进行除锈处理,且无需采用脱漆剂,从而能够减小环境污染;另一方面,使第一刷以恒定压力压迫于轮对轴身并转动式除锈,除锈效果较好,同时除锈脱漆效率较高。第二刷以
恒定压力压迫于防尘板座并转动式除锈,除锈效果较好,同时除锈脱漆效率较高。
7.在其中一个实施例中,所述的轮对除锈机还包括设置于所述第一安装机架旁侧的防护组件;所述防护组件包括防护罩、支撑体与推拉机构;所述防护罩设有罩口,所述防护罩能通过其罩口罩设到轮对轴承与防尘板座外;所述推拉机构装设于所述支撑体上,所述推拉机构与所述防护罩相连,所述推拉机构用于驱动所述防护罩移动并套设到所述轮对轴承与所述防尘板座外。
8.在其中一个实施例中,所述防护组件还包括检测组件;所述检测组件用于检测所述轮对轴承是否退卸,所述检测组件与所述推拉机构电性连接;所述推拉机构用于在所述轮对轴承未退卸时驱动所述防护罩移动套设到所述轮对轴承与防尘板座外。
9.在其中一个实施例中,所述轴身除锈组件还包括第一传动轴、第一支架及第一移动机构,所述第一伺服电机用于驱动所述第一传动轴转动,所述第一伺服电机与所述第一传动轴均装设于所述第一支架上,所述第一刷装设于所述第一传动轴上,所述第一移动机构与所述第一支架相连,所述第一移动机构用于移动所述第一支架以调整所述第一刷与轮对轴身的间距;
10.所述板座除锈组件还包括第二传动轴、第二支架及第二移动机构,所述第二伺服电机用于驱动所述第二传动轴转动,所述第二伺服电机与所述第二传动轴均装设于所述第二支架上,所述第二刷装设于所述第二传动轴上,所述第二移动机构与所述第二支架相连,所述第二移动机构用于移动所述第二支架以调整所述第二刷与防尘板座的间距。
11.在其中一个实施例中,所述轴身除锈组件还包括第一控制器与第一检测器,所述第一控制器分别与所述第一检测器、所述第一伺服电机及所述第一移动机构电性连接;所述第一检测器与所述第一伺服电机电性连接,所述第一检测器用于检测所述第一伺服电机的工作电流,所述第一控制器用于根据所述第一检测器的电流检测值控制所述第一移动机构的移动工作;
12.所述板座除锈组件还包括第二控制器与第二检测器,所述第二控制器分别与所述第二检测器、所述第二伺服电机及所述第二移动机构电性连接,所述第二检测器与所述第二伺服电机电性连接,所述第二检测器用于检测所述第二伺服电机的工作电流,所述第二控制器用于根据所述第二检测器的电流检测值控制所述第二移动机构的移动工作。
13.在其中一个实施例中,所述第一支架上设有第一轴承座,所述第一传动轴转动地设于所述第一轴承座上;所述第一传动轴通过第一传动组件与所述第一伺服电机的转轴相连;所述第一传动轴上装设的所述第一刷为一个以上;
14.所述第二支架上设有第二轴承座,所述第二传动轴转动地设于所述第二轴承座上;所述第二传动轴通过第二传动组件与所述第二伺服电机的转轴相连;所述第二传动轴上装设的所述第二刷为一个以上。
15.在其中一个实施例中,所述第一移动机构包括第三伺服电机、第一丝杆、第三轴承座、第三支架、与可移动地设于所述第三支架上的第一活动座;所述第三轴承座装设于所述第三支架上,所述第一丝杆转动地设于所述第三轴承座上并与所述第三伺服电机的转轴相连;所述第一活动座设有与所述第一丝杆上相应的螺孔或者固定设有用于套设于所述第一丝杆上的第一螺母,所述第一活动座与所述第一支架相连;
16.所述第二移动机构包括第四伺服电机、第二丝杆、第四轴承座、第四支架、与可移
动地设于所述第四支架上的第二活动座;所述第四轴承座装设于所述第四支架上,所述第二丝杆转动地设于所述第四轴承座上并与所述第四伺服电机的转轴相连;所述第二活动座设有与所述第二丝杆上相应的螺孔或者固定设有用于套设于所述第二丝杆上的第二螺母,所述第二活动座与所述第二支架相连。
17.在其中一个实施例中,所述轴身除锈组件还包括第三移动机构,所述第三移动机构用于驱动所述第一移动机构沿着轮轴中心线的方向移动;所述板座除锈组件还包括第四移动机构,所述第四移动机构用于驱动所述第二移动机构沿着轮轴中心线的方向移动。
18.在其中一个实施例中,所述第一安装机架包括第一支撑座、第二支撑座、装设于所述第一支撑座与第二支撑座上的横梁及移动地设置于所述横梁上的第一滑动座与第二滑动座;所述第三移动机构装设于所述第一支撑座上,所述第三移动机构的移动端与所述第一滑动座相连,所述第一移动机构设置于所述第一滑动座上;所述第四移动机构装设于所述第二支撑座上,所述第四移动机构的移动端与所述第二滑动座相连,所述第二移动机构设置于所述第二滑动座上。
19.在其中一个实施例中,所述轮对除锈机还包括设置于所述第一除锈工位的第一转轮器,所述第一转轮器用于驱动轮对以轮轴中心线为轴心转动。
20.在其中一个实施例中,所述第二安装机架包括立柱;所述辐板除锈组件还包括升降机构与摆动机构;所述升降机构设置于所述立柱上,并可沿所述立柱做升降运动;所述摆动机构设置于所述升降机构上,并可随所述升降机构升降,所述摆动机构输出横向移动运动与摆动运动;所述旋转机构设置于所述摆动机构,并随所述摆动机构运动,所述旋转机构能够与所述轮对的车轮抵接,对所述辐板孔部位除锈。
21.在其中一个实施例中,所述升降机构包括升降动力源以及与所述升降动力源连接的升降座,所述升降座可移动设置于轮对除锈机的立柱,所述升降动力源驱动所述升降座沿所述立柱升降,所述升降座上安装所述摆动机构。
22.在其中一个实施例中,所述升降机构还包括升降感应组件,所述升降感应组件设置于所述升降动力源,用于检测所述升降动力源输出的升降高度。
23.在其中一个实施例中,所述摆动机构包括托架以及设置所述托架的摆动组件,所述托架与所述升降座连接,所述摆动组件设置于所述托架上,所述摆动组件与所述旋转机构连接,并带动所述旋转机构摆动。
24.在其中一个实施例中,所述摆动机构还包括进给组件,所述进给组件设置于所述摆动组件与所述托架之间,所述进给组件用于带动所述摆动组件横向移动,使所述旋转机构接触或远离所述辐板孔部位的除锈面。
25.在其中一个实施例中,所述进给组件包括滑动件、可移动设置于所述滑动件的滑台以及与所述滑台连接的进给动力源,所述进给动力源设置于所述托架,用于驱动所述滑台沿所述滑动件移动,所述摆动组件设置于所述滑台。
26.在其中一个实施例中,所述进给组件还包括进给感应件,所述进给感应件设置于所述进给动力源,所述进给感应件用于检测所述进给动力源输出的进给距离。
27.一种所述的轮对除锈机的除锈方法,包括如下步骤:
28.步骤s100、将轮对送入到第一除锈工位,由轴身除锈组件的第一刷对轴身进行除锈处理;
29.步骤s200、将轮对送入到第二除锈工位,由辐板除锈组件的第三刷对辐板孔部位进行除锈处理。
30.上述的轮对除锈机的除锈方法,一方面,能实现对轮对的各个探伤部位均进行除锈处理,且无需采用脱漆剂,从而能够减小环境污染;另一方面,使第一刷以恒定压力压迫于轮对轴身并转动式除锈,除锈效果较好,同时除锈脱漆效率较高。第二刷以恒定压力压迫于防尘板座并转动式除锈,除锈效果较好,同时除锈脱漆效率较高。
31.在其中一个实施例中,在步骤s100之前包括步骤:
32.步骤s91、检测轮对的轴体插入段上装设的轮对轴承是否退卸;
33.步骤s92、当轮对的轴体插入段上装设的轮对轴承未退卸时,推拉机构驱动防护罩移动带动防护罩移动并套设到轮对轴承与防尘板座外;
34.并在步骤s100中,由轴身除锈组件的第一刷对轴身进行除锈处理,板座除锈组件的第二刷不对防尘板座进行除锈处理;
35.步骤s93、当轮对的轴体插入段上装设的轮对轴承退卸时,推拉机构停止动作,步骤s100中还包括步骤:由板座除锈组件的第二刷对防尘板座进行除锈处理。
36.在其中一个实施例中,在对轮对轴身进行除锈工作时,通过第一移动机构移动第一支架以使得第一刷靠近于轮对轴身与轮对轴身相接触,并以恒定大小的压力压迫于轮对轴身上,第一伺服电机驱动第一传动轴转动带动第一刷转动对轮对轴身进行除锈处理;在防尘板座进行除锈工作时,通过第二移动机构移动第二支架以使得第二刷靠近于防尘板座与防尘板座相接触,并以恒定大小的压力压迫于防尘板座上,第二伺服电机驱动第二传动轴转动带动第二刷转动对防尘板座进行除锈处理。
附图说明
37.构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
38.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
39.图1为一实施例的轮对的结构示意图;
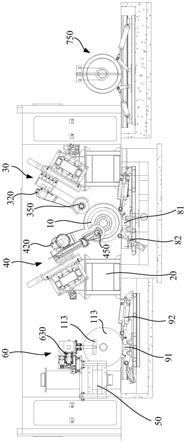
40.图2为本发明一实施例的轮对除锈机的结构示意图;
41.图3为本发明一实施例的防护组件的防护罩罩设于轮对轴承及防尘板座的结构示意图;
42.图4为本发明一实施例的防护组件的防护罩未罩设于轮对轴承及防尘板座的结构示意图;
43.图5为本发明另一实施例的防护组件的防护罩未罩设于轮对轴承及防尘板座的结构示意图;
44.图6为图3的侧视图;
45.图7为本发明一实施例的检测组件检测轮对的工作状态示意图;
46.图8为本发明一实施例的轮对除锈机的第一伺服电机、第一移动机构的主视图;
47.图9为图8的俯视图;
48.图10为本发明一实施例的轮对除锈机的第二伺服电机、第二移动机构的主视图;
49.图11为本发明一实施例的轮对除锈机的第一安装机架一视角结构图;
50.图12为本发明一实施例的轮对除锈机对轮对进行除锈的一状态示意图;
51.图13为本发明一实施例的辐板除锈组件的主视图;
52.图14为图13所示的辐板除锈组件的侧视局剖图。
53.10、轮对;11、轮轴;111、轴身;112、防尘板座;113、轴体插入段;12、车轮;121、辐板孔部位;13、轮对轴承;20、第一安装机架;21、第一支撑座;22、第二支撑座;23、横梁;24、第一滑动座;25、第二滑动座;26、纵梁;30、轴身除锈组件;320、第一伺服电机;330、第一传动轴;340、第一支架;341、第一轴承座;342、第一传动组件;3421、链轮;3422、传动链;350、第一刷;360、第一移动机构;361、第三伺服电机;362、第一丝杆;363、第三轴承座;364、第三支架;365、第一活动座;366、第一螺母;367、减速机;368、联轴器;370、第三移动机构;40、板座除锈组件;420、第二伺服电机;430、第二传动轴;440、第二支架;441、第二轴承座;442、第二传动组件;450、第二刷;460、第二移动机构;470、第四移动机构;50、第二安装机架;51、立柱;52、连接梁;60、辐板除锈组件;610、升降机构;611、升降动力源;612、升降座;613、导轨;620、摆动机构;621、托架;622、摆动组件;6221、摆动动力源;6222、第三传动组件;62221、主动齿轮;62222、从动齿轮;6223、摆轴;623、进给组件;6231、进给动力源;6232、滑台;6233、滑动件;630、旋转机构;631、旋转动力源;632、连接轴;640、连接组件;650、第三刷;70、防护组件;720、防护罩;721、罩口;730、支撑体;731、耐磨板;740、推拉机构;741、活塞;750、检测组件;751、对位架;752、检测盒;7521、第一探测器;7522、第二探测器;760、第一防护套;770、第二防护套;81、第一转轮器;82、第一限位机构;821、第一抵触部;822、第二抵触部;823、第一推动机构;824、第二推动机构;83、底板;91、第二转轮器;92、第二限位机构。
具体实施方式
54.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
55.参阅图1与图2,图1示出了一实施例的轮对10的结构示意图,图2示出了本发明一实施例的轮对除锈机的结构示意图。本发明一实施例提供的一种轮对除锈机,轮对除锈机包括第一安装机架20、轴身除锈组件30、板座除锈组件40、第二安装机架50及辐板除锈组件60。第一安装机架20用于设于第一除锈工位。轴身除锈组件30与板座除锈组件40均设置于第一安装机架20上。轴身除锈组件30包括第一伺服电机320与第一刷350,第一伺服电机320用于驱动第一刷350转动并对轮对轴身111进行除锈操作。板座除锈组件40包括第二伺服电机420与第二刷450,第二伺服电机420用于驱动第二刷450转动对防尘板座112进行除锈操作。第二安装机架50用于设于第二除锈工位。辐板除锈组件60设置于第二安装机架50上,辐板除锈组件60包括旋转机构630与第三刷650。旋转机构630用于驱动第三刷650转动并对辐板孔部位121进行除锈操作。
56.上述的轮对除锈机对轮对除锈过程中,先将轮对10送入到第一除锈工位,由轴身
除锈组件30的第一刷350对轴身111进行除锈处理,同时还由板座除锈组件40的第二刷450对防尘板座112进行除锈处理;然后,还将轮对10送入到第二除锈工位,还由辐板除锈组件60的第三刷650对辐板孔部位121进行除锈处理,这样便可以分别对轮对10的轴身111、防尘板座112及辐板孔部位121进行除锈处理,在除锈处理过程中可以配合用清水对除锈颗粒进行冲洗。如此,一方面,能实现对轮对10的各个探伤部位均进行除锈处理,且无需采用脱漆剂,从而能够减小环境污染;另一方面,使第一刷350以恒定压力压迫于轮对轴身111并转动式除锈,除锈效果较好,同时除锈脱漆效率较高。第二刷450以恒定压力压迫于防尘板座112并转动式除锈,除锈效果较好,同时除锈脱漆效率较高。
57.一般地,对于未退卸轮对轴承13的轮对10,也就是说在轮对10的轴体插入段113上套设有轮对轴承13。在进入到除锈操作之前,通常采用人工手动方式将橡胶套套设装入到轮对轴承13外对轮对轴承13进行防护。然而,装拆橡胶套费时费力,一旦漏装,会给轮对10上装设的轮对轴承13带来严重损害。
58.请参阅图1、图3与图4,图3示出了本发明一实施例的防护组件70的防护罩720罩设于轮对轴承13及防尘板座112的结构示意图,图4示出了本发明一实施例的防护组件70的防护罩720未罩设于轮对轴承13及防尘板座112的结构示意图。进一步地,轮对除锈机还包括设置于第一安装机架20旁侧的防护组件70。防护组件70包括防护罩720、支撑体730与推拉机构740。防护罩720设有罩口721,防护罩720能通过其罩口721罩设到轮对轴承13与防尘板座112外。推拉机构740装设于支撑体730上,推拉机构740与防护罩720相连,推拉机构740用于驱动防护罩720移动并套设到轮对轴承13与防尘板座112外。如此,当轴体插入段113上装设的轮对轴承13未退卸时,推拉机构740驱动防护罩720移动,带动防护罩720移动并套设到轮对轴承13与防尘板座112外,由防护罩720对轴体插入段113上的轮对轴承13进行防护,能避免在第一工位除锈进行除锈作业过程中所产生的灰尘与水雾进入到防护罩720内部并接触到轮对轴承13对轮对轴承13造成极大的损害;此外,防护罩720相对于传统的橡胶套而言,防护罩720是在推拉机构740的驱动下套设到轮对轴承13与防尘板座112外,防护罩720的罩口721设计的足够大,容易套设到轮对轴承13外,操作更加容易,自动化程度较高。
59.需要说明的是,当轴体插入段113上装设的轮对轴承13未退卸时,推拉机构740驱动防护罩720移动,带动防护罩720移动并套设到轮对轴承13与防尘板座112外,此时由于防护罩720罩设于防尘板座112的外部,轮对除锈机便不会对防尘板座112进行除锈操作,也无需对防尘板座112进行除锈操作。
60.需要说明的是,当防护罩720通过其罩口721罩设到轮对轴承13与防尘板座112外时,为了提高防护效果,防护罩720的罩口721口缘与车轮12的辐板外侧面间隙配合,这样能较好地防止除锈作业过程中产生的水雾及灰尘进入到防护罩720,同时也不影响在除锈过程中,轮对10在其下方的第一转轮器81的驱动下进行的转动动作。
61.需要说明的是,当需要对轮对10的两端的两个轮对轴承13均进行防护时,防护组件70为两个,两个防护组件70分别对应给两个轮对轴承13进行防护。当然,若只需要对轮对10的其中一端的轮对轴承13进行防护时,防护组件70设置为一个即可。
62.还需要说明的是,类似于在第一安装机架20旁侧设置防护组件70,轮对除锈机还可以包括设置于第二安装机架50旁侧的防护组件70,如此在第二除锈工位对防尘板座112进行除锈作业时,也可以将防护组件70的防护罩720罩设于轮对轴承13与防尘板座112外进
行防护,以避免在第二工位除锈进行除锈作业过程中所产生的灰尘与水雾进入到防护罩720内部并接触到轮对轴承13对轮对轴承13造成损害。当然,由于辐板孔部位121位于车轮12背离于轮对轴承13的一侧,在第二工位除锈进行除锈作业过程中,除锈作业过程中所产生的灰尘与水雾接触到轮对轴承13对轮对轴承13造成损害较小,即也可以无需在第二安装机架50旁侧设置防护组件70。第二安装机架50旁侧是否设置防护组件70可以根据实际情况进行设置,在此不进行限定。
63.请参阅图3与图7,图7示出了本发明一实施例的检测组件750检测轮对10的工作状态示意图。进一步地,防护组件70还包括检测组件750。检测组件750用于检测轮对轴承13是否退卸,检测组件750与推拉机构740电性连接。推拉机构740用于在轮对轴承13未退卸时驱动防护罩720移动套设到轮对轴承13与防尘板座112外。如此,无需人为判断轮对10上的轮对轴承13是否退卸,通过检测组件750进行检测并判断,当检测组件750判断到轮对轴承13退卸时,推拉机构740不再驱动防护罩720套设到轮轴11端部上,轮对10正常进入到第一除锈工位进行下一步除锈动作;当检测组件750检测到轮对轴承13未退卸时,推拉机构740驱动防护罩720移动并套设到轮对轴承13与防尘板座112外,对轮对轴承13与防尘板座112进行防护作用,然后再进入到下一步除锈动作。自动化程度较高,能节省人力物力,工作效率较高。
64.请参阅图3与图7,在一个实施例中,检测组件750包括对位架751、及设置于对位架751上的检测盒752。对位架751用于与轮对10进行对位,检测盒752设有间隔的第一探测器7521与第二探测器7522。第一探测器7521用于探测经对位架751对位的轮对轴承13其中一侧边缘,第二探测器7522用于探测经对位架751对位的轮对轴承13另一侧边缘。如此,当第一探测器7521感测到经对位架751对位的轮对轴承13其中一侧边缘,第二探测器7522感测到经对位架751对位的轮对轴承13另一侧边缘时,检测盒752相应判断到轮对轴承13未退卸;当第一探测器7521没有感测到经对位架751对位的轮对轴承13其中一侧边缘,或者第二探测器7522没有感测到经对位架751对位的轮对轴承13另一侧边缘时,检测盒752相应判断到轮对轴承13退卸。
65.具体而言,第一探测器7521例如为第一激光测距感应器,第二探测器7522例如为第二激光测距感应器。当第一激光测距感应器发射出的激光光线发射并感测到经对位架751对位的轮对轴承13其中一侧边缘,第二激光测距感应器发射出的激光光线发射并感测到经对位架751对位的轮对轴承13另一侧边缘时,检测盒752相应判断到轮对轴承13未退卸;当第一激光测距感应器发射出的激光光线发射后没有感测到经对位架751对位的轮对轴承13其中一侧边缘,或者第二激光测距感应器发射出的激光光线发射后没有感测到经对位架751对位的轮对轴承13另一侧边缘时,检测盒752相应判断到轮对轴承13退卸。进一步地,第一激光测距感应器具体例如设置于对位支撑体730的顶部,在竖向方向上从上往下发射激光光线到轮对轴承13的其中一侧边缘,第二激光测距感应器具体例如设置于对位支撑体730的顶部,在竖向方向上从上往下发射激光光线到轮对轴承13的另一侧边缘。
66.需要说明的是,也不限于采用第一激光测距感应器与第二激光测距感应器,还可以采用两个超声波探测器来实现,或者采用两个红外线探测器来实现,在此不进行限定。
67.请参阅图3,在一个实施例中,推拉机构740为无杆气缸、油缸、液压缸、电缸或电机丝杆。具体在本实施例中,推拉机构740为无杆气缸,无杆气缸体积较小,不易于第一安装机
架20发生干涉,并能装设到第一转轮器81的上方。可以理解的是,推拉机构740不限于是无杆气缸,还可以是其它能够驱动防护罩720移动的动力机构。
68.请参阅图3与图4,在一个实施例中,推拉机构740为无杆气缸,无杆气缸的活塞741与防护罩720相连。防护组件70还包括套设于无杆气缸上的第一防护套760,第一防护套760为可伸缩式防护套,第一防护套760的一端与无杆气缸的一端相连,第一防护套760的另一端与防护罩720相连。如此,当无杆气缸的活塞741移动驱动防护罩720罩设于轮对轴承13外时,防护罩720同步带动第一防护套760伸展开,第一防护套760伸展开后对无杆气缸起到保护作用,避免除锈作业过程中所产生的灰尘与水雾接触到无杆气缸对无杆气缸造成极大的损害;此外,当轮对10的除锈作业结束后,无杆气缸的活塞741反向移动复位,防护罩720从轮对轴承13上移出,防护罩720移出轮对轴承13的同时带动第一防护套760收缩。
69.请参阅图5,图5示意出了本发明另一实施例的防护组件70的防护罩720未罩设于轮对轴承13及防尘板座112的结构示意图。图5与图4相比,区别在于,图5中的无杆气缸上不止是套设有第一防护套760,还套设有第二防护套770。进一步地,防护组件70还包括套设于无杆气缸上的第二防护套770。第二防护套770为可伸缩式防护套,第二防护套770的一端与无杆气缸的另一端相连,第二防护套770的另一端与防护罩720相连。如此,由第一防护套760与第二防护套770共同套设于无杆气缸上,对整个无杆气缸进行防护。这样无论无杆气缸的活塞741将防护罩720移动到任意位置时,由于第一防护套760与第二防护套770两者协同作用,对无杆气缸起到较好的防护作用。具体而言,第一防护套760与第二防护套770选用风琴式防护套。
70.请参阅图6,图6示出了图3的侧视图。在一个实施例中,支撑体730上设有耐磨板731。防护罩720与耐磨板731滑动配合。如此,支撑体730通过耐磨板731支撑住防护罩720,防护罩720被推拉机构740移动过程中,沿着耐磨板731移动,稳定性较好,且磨损量较小;此外,耐磨板731具体选用自润滑尼龙板或其它材质的润滑耐磨板731,磨损量较小,且噪音小。具体而言,支撑体730上设有两个耐磨板731,两个耐磨板731间隔设置并支撑于防护罩720的两侧,无杆气缸位于两个耐磨板731之间,这样两个耐磨板731相当于形成了防护罩720的滑道,能实现防护罩720平稳地运行。
71.在一个实施例中,防护组件70还包括设置于支撑体730上的感应开关及设置于推拉机构740上的并与感应开关相配合的感应元件。当推拉机构740带动防护罩720移动并套设到轮对轴承13与防尘板座112外时,感应开关感应到感应元件并用于控制轮对除锈机进行除锈作业。
72.在另一个实施例中,防护罩720转动地设置于支撑体730上,推拉机构740用于驱动防护罩720转动地套设到轮对轴承13与防尘板座112外。如此,不限于上述例如采用无杆气缸通过平移防护罩720的方式来将防护罩720套设到轮对轴承13与防尘板座112外,还可以采用转动的方式打开防护罩720或者将防护罩720转动套设到轮对轴承13与防尘板座112外进行防护。
73.请参阅图1、图8与图9,图8示出了本发明一实施例的轮对除锈机的第一伺服电机320、第一移动机构360的主视图,图9示出了图8的俯视图。在一个实施例中,轴身除锈组件30还包括第一传动轴330、第一支架340及第一移动机构360。第一伺服电机320用于驱动第一传动轴330转动,第一伺服电机320与第一传动轴330均装设于第一支架340上,第一刷350
装设于第一传动轴330上,第一移动机构360与第一支架340相连,第一移动机构360用于移动第一支架340以调整第一刷350与轮对轴身111的间距。
74.请参阅图1、图10至图12,图10示出了本发明一实施例的轮对除锈机的第二伺服电机420、第二移动机构460的主视图,图11示出了本发明一实施例的轮对除锈机的第一安装机架20一视角结构图,图12示出了本发明一实施例的轮对除锈机对轮对10进行除锈的一状态示意图。板座除锈组件40还包括第二传动轴430、第二支架440及第二移动机构460。第二伺服电机420用于驱动第二传动轴430转动,第二伺服电机420与第二传动轴430均装设于第二支架440上,第二刷450装设于第二传动轴430上,第二移动机构460与第二支架440相连,第二移动机构460用于移动第二支架440以调整第二刷450与防尘板座112的间距。
75.如此,在进行除锈工作时,通过第一移动机构360移动第一支架340以使得第一刷350靠近于轮对轴身111与轮对轴身111相接触,并以恒定大小的压力压迫于轮对轴身111上,第一伺服电机320驱动第一传动轴330转动带动第一刷350转动,第一刷350转动时便可以对轮对轴身111进行除锈处理。同样地,通过第二移动机构460移动第二支架440以使得第二刷450靠近于防尘板座112与防尘板座112相接触,并以恒定大小的压力压迫于防尘板座112上,第二伺服电机420驱动第二传动轴430转动带动第二刷450转动,第二刷450转动时便可以对防尘板座112进行除锈处理。
76.在一个实施例中,轴身除锈组件30还包括第一控制器与第一检测器。第一控制器分别与第一检测器、第一伺服电机320及第一移动机构360电性连接;第一检测器与第一伺服电机320电性连接,第一检测器用于检测第一伺服电机320的工作电流,第一控制器用于根据第一检测器的电流检测值控制第一移动机构360的移动工作。
77.同样地,板座除锈组件40还包括第二控制器与第二检测器。第二控制器分别与第二检测器、第二伺服电机420及第二移动机构460电性连接。第二检测器与第二伺服电机420电性连接,第二检测器用于检测第二伺服电机420的工作电流,第二控制器用于根据第二检测器的电流检测值控制第二移动机构460的移动工作。如此,当第一检测器检测到第一伺服电机320的工作电流达到设定电流时,第一控制器控制第一移动机构360停止进给,此时第一支架340上的第一刷350不再进给,使得第一刷350以恒定压力压迫于轮对轴身111并维持恒定速度转动进行除锈操作,对轮对轴身111的除锈效果较好,且除锈效率较高。同样地,当第二检测器检测到第二伺服电机420的工作电流达到设定电流时,第二控制器控制第二移动机构460停止进给,此时第二支架440上的第二刷450不再进给,使得第二刷450以恒定压力压迫于防尘板座112并维持恒定速度转动进行除锈操作,对防尘板座112的除锈效果较好,且除锈效率较高。
78.请参阅图8与图9,进一步地,第一支架340上设有第一轴承座341,第一传动轴330转动地设于第一轴承座341上。第一传动轴330通过第一传动组件342与第一伺服电机320的转轴相连。第一传动轴330上装设的第一刷350为一个以上。
79.请参阅图10,进一步地,第二支架440上设有第二轴承座441,第二传动轴430转动地设于第二轴承座441上。第二传动轴430通过第二传动组件442与第二伺服电机420的转轴相连。第二传动轴430上装设的第二刷450为一个以上。
80.具体而言,第一传动轴330上装设的第一刷350为两个,第一传动轴330上装设的两个第一刷350分别位于第一传动轴330的两端。第一传动轴330转动时同步带动两个第一刷
350转动并一起对轮对轴身111进行除锈操作,能保证除锈效果以及提高除锈效率。当然第一刷350也可以是一个或其它数量,在此不进行限定。第二传动轴430上装设的第二刷450类似,在此不再赘述。
81.此外,需要说明的是,第一传动组件342为第一伺服电机320的转轴与第一传动轴330的中间元件,结构形式较多,在此不进行限定。举例而言,第一传动组件342包括两个链轮3421及连接两个链轮3421的传动链3422,其中一个链轮3421装设于第一传动轴330上,另一个链轮3421装设于第一伺服电机320的转轴上。第二传动组件442类似于第一传动组件342,在此不再赘述。
82.在一个实施例中,第三支架364上沿着第一活动座365的运行方向依次设有第一接近开关、零位接近开关与第二接近开关。第一接近开关、零位接近开关与第二接近开关均和第三伺服电机361电性连接。第一活动座365上设有第一触发元件,第一触发元件能触发启闭第一接近开关、零位接近开关及第二接近开关。
83.需要说明的是,第一接近开关、第二接近开关分别对应于第一活动座365在第三支架364上的两个极限位置,当第一活动座365移动到第三支架364上对应第一接近开关所在的位置时,第一刷350此时处于最为远离于轮对轴身111的极限位置,第一接近开关控制第三伺服电机361停止动作或者反方向移动;当第一活动座365移动到第三支架364上第二接近开关所在的位置时,第一刷350此时处于最为靠近于轮对轴身111的极限位置,第二接近开关控制第三伺服电机361停止动作或者反方向移动。此外,零位接近开关所在的位置对应于第一刷350刚好接触轮对轴身111的位置或者刚好与轮对轴身111相分离的位置,即当第一活动座365移动到第三支架364上零位接近开关所在的位置时,第一刷350刚好接触轮对轴身111或者刚好与轮对轴身111相分离,此时零位接近开关控制第三伺服电机361改变速度。另外,第一活动座365在第三支架364上对应第一接近开关的位置与零位接近开关对应的位置之间的运行速度为第一速度,第一活动座365在第三支架364上第二接近开关对应的位置与零位接近开关对应的位置之间的运行速度为第二速度,第一速度大于第二速度。
84.即除锈操作时,第一活动座365由第三支架364上对应第一接近开关的位置快速运行到对应于零位接近开关的位置,这样使得第一支架340带动第一刷350由最远离于轮对轴身111的位置快速移动到接触轮对轴身111的位置;当第一活动座365运行到第三支架364上对应于零位接近开关的位置,零位接近开关被第一触发元件触发,控制第三伺服电机361改变速度,由高速转动改变为低速转动,使得第一活动座365以低速进给移动;当第一活动座365以低速进给运行到第三支架364上对应于第二接近开关的位置时,第二接近开关能被第一触发元件触发,控制第三伺服电机361停止运转,这样便能避免第一活动座365继续进给导致出现第一丝杆362脱轨的不良现象。
85.需要说明的是,第一活动座365可以移动到第三支架364上对应于第二接近开关的位置,并由第二接近开关控制第三伺服电机361停止运转;第一活动座365也可以移动到预设位置,该预设位置处于第三支架364上对应于零位接近开关与第二接近开关之间的位置,可以根据实际情况进行设置,并在移动到该预设位置时,第三伺服电机361停止运转。具体而言,将第一伺服电机320的工作电流达到设定电流时,第一活动座365所处的位置设为预设位置,也就是当第一活动座365移动到该预设位置时,第一伺服电机320的工作电流达到设定电流,控制第三伺服电机361停止运转,从而第一刷350不再进给,第一伺服电机320此
时以恒定大小的压力压迫于轮对轴身111的表面上,以恒定大小的压力压迫于轮对轴身111对轮对轴身111的除锈效果较好,且除锈效率较高。
86.需要说明的是,在随着第一活动座365由第三支架364上对应于零位接近开关的位置移动到预设位置的过程中,第一刷350开始接触轮对轴身111的表面并逐渐压紧轮对轴身111的表面,第一刷350对轮对轴身111的压力随着第一刷350朝向轮对轴身111的表面的方向逐渐进给而逐渐增大,同时第一伺服电机320的工作电流将逐渐增大。
87.可以理解的是,第四支架类似于第三支架364,也设置有接近开关,在此不再赘述。
88.请参阅图8与图9,在一个实施例中,第一移动机构360包括第三伺服电机361、第一丝杆362、第三轴承座363、第三支架364、与可移动地设于第三支架364上的第一活动座365。第三轴承座363装设于第三支架364上,第一丝杆362转动地设于第三轴承座363上并与第三伺服电机361的转轴相连。第一活动座365设有与第一丝杆362上相应的螺孔或者固定设有用于套设于第一丝杆362上的第一螺母366,第一活动座365与第一支架340相连。
89.此外,第二移动机构460包括第四伺服电机、第二丝杆、第四轴承座、第四支架、与可移动地设于第四支架上的第二活动座;第四轴承座装设于第四支架上,第二丝杆转动地设于第四轴承座上并与第四伺服电机的转轴相连;第二活动座设有与第二丝杆上相应的螺孔或者固定设有用于套设于第二丝杆上的第二螺母,第二活动座与第二支架440相连。
90.具体而言,第一丝杆362与第二丝杆均例如为滚珠丝杆。如此,第一移动机构360通过第三伺服电机361与第一丝杆362来驱动第一活动座365移动,进而带动第一支架340移动,这样能较为精密地调整第一刷350的位置,从而能精密地控制第一刷350压紧于轮对轴身111的程度及压紧力大小。同样,也能精密地控制第二刷450压紧于防尘板座112的程度及压紧力大小。作为一个可选的方案,第一移动机构360与第二移动机构460均不限于采用丝杆驱动,例如还可以是采用气缸驱动、油缸驱动、电缸驱动或齿轮传动等等,在此不进行限定。
91.进一步地,第三伺服电机361的转轴与第一丝杆362之间设有减速机367与联轴器368。第三伺服电机361的转轴与减速机367相连,减速机367通过联轴器368与第一丝杆362相连。第四伺服电机的转轴与第二丝杆之间类似设置,不进行赘述。
92.请参阅图8、图11与图12,轴身除锈组件30还包括第三移动机构370,第三移动机构370用于驱动第一移动机构360沿着轮轴11中心线的方向移动;板座除锈组件40还包括第四移动机构470,第四移动机构470用于驱动第二移动机构460沿着轮轴11中心线的方向移动。如此,第三移动机构370驱动第一移动机构360沿着轮轴11中心线的方向移动,第一移动机构360带动第一支架340沿着轮轴11中心线的方向移动,从而带动第一刷350沿着轮轴11中心线的方向来回移动,这样便能对轮对轴身111的轴向方向均进行除锈处理,除锈面积较大,除锈效率较高,除锈效果较好。同样地,第四移动机构470驱动第二移动机构460沿着轮轴11中心线的方向移动,第二移动机构460带动第二支架440沿着轮轴11中心线的方向移动,从而带动第二刷450沿着轮轴11中心线的方向来回移动,这样便能对防尘板座112的轴向方向均进行除锈处理,除锈面积较大,除锈效率较高,除锈效果较好。
93.请参阅图8、图11与图12,进一步地,第一安装机架20包括第一支撑座21、第二支撑座22、装设于第一支撑座21与第二支撑座22上的横梁23及移动地设置于横梁23上的第一滑动座24与第二滑动座25。第三移动机构370装设于第一支撑座21上,第三移动机构370的移
动端与第一滑动座24相连,第一移动机构360设置于第一滑动座24上。第四移动机构470装设于第二支撑座22上,第四移动机构470的移动端与第二滑动座25相连,第二移动机构460设置于第二滑动座25上。
94.如此,第三移动机构370驱动第一滑动座24沿着横梁23移动,第一滑动座24移动的同时带动第一移动机构360移动;此外,第三移动机构370、第一移动机构360及第一支架340均由第一安装机架20支撑起来,这样一方面,第一支架340连带第一刷350沿着横梁23移动,另一方面,第一移动机构360移动第一支架340由上至下接触轮对轴身111,整体运行稳定性较好,除锈效果较好,除锈效率较高。第四移动机构470的机理类似于第三移动机构370,第四移动机构470驱动第二滑动座25沿着横梁23上移动,第二滑动座25移动的同时带动第二移动机构460移动,在此不再赘述。
95.具体而言,第三移动机构370、第四移动机构470均例如为电机丝杆驱动机构、气缸驱动机构、油缸驱动机构、电缸驱动机构、齿轮驱动机构等等,在此不进行限定。
96.在一个实施例中,横梁23的两端分别设有第三接近开关与第四接近开关。第一滑动座24上设有第二触发元件,第二触发元件能触发启闭第三接近开关与第四接近开关,第三接近开关与第四接近开关均与第三移动机构370电性连接。如此,当第一滑动座24移动到横梁23的其中一端时,第三接近开关被第二触发元件触发相应控制第三移动机构370切换运行方向;当第一滑动座24移动到横梁23的另一端时,第四接近开关被第二触发元件触发相应控制第三移动机构370切换运行方向,便实现了第三移动机构370驱动第一刷350在轮轴11中心线的方向上往复来回运动。第四移动机构470类似于第三移动机构370,也可以设置有对应的接近开关,在此不进行赘述。
97.请再参阅图11与图12,在一个实施例中,横梁23为两个,两个横梁23相对间隔地设置并分别位于轮轴11的两侧;第一伺服电机320、第二伺服电机420、第一传动轴330、第二传动轴430、第一支架340、第二支架440、第一移动机构360、第二移动机构460、第三移动机构370及第四移动机构470均为两个,两个第一伺服电机320、两个第二伺服电机420、两个第一传动轴330、两个第二传动轴430、两个第一支架340、两个第二支架440、两个第一移动机构360、两个第二移动机构460、两个第三移动机构370及两个第四移动机构470均与两个横梁23对应设置。如此,位于轮轴11其中一侧的横梁23对应有第一移动机构360、第二移动机构460、第三移动机构370、第四移动机构470、第一伺服电机320、第二伺服电机420、第一传动轴330、第一传动轴330上装设的第一刷350、第二传动轴430及第二传动轴430上装设的第二刷450,由轮轴11其中一侧的第一刷350对轮对轴身111其中一侧进行除锈操作,以及由其中一个第二刷450对轮对10的其中一端的防尘板座112进行除锈操作,也可以同步由轮轴11另一侧的第一刷350对轮对轴身111另一侧进行除锈操作,以及由另一个第二刷450对轮对10的另一端的防尘板座112进行除锈操作,如此便能提高除锈效率以及除锈效果。
98.相应地,第一支撑座21与第二支撑座22均为两个,其中一个第一支撑座21与其中一个第二支撑座22装设其中一个横梁23,另一个第一支撑座21与另一个第二支撑座22装设另一个横梁23。进一步地,第一安装机架20还包括相对间隔的两个纵梁26,两个横梁23通过纵梁26固定相连。
99.请参阅图2与图12,在一个实施例中,轮对除锈机还包括设置于第一除锈工位的第一转轮器81,第一转轮器81用于驱动轮对10以轮轴11中心线为轴心转动。如此,第一刷350
对轮对轴身111除锈过程中,第一转轮器81同步驱动轮对轴身111自转,从而便能实现对轮对轴身111全方位除锈处理,除锈效果较好,除锈效率较高。同样地,第二刷450对防尘板座112除锈过程中,第一转轮器81同步驱动防尘板座112自转,从而便能实现对防尘板座112全方位除锈处理,除锈效果较好,除锈效率较高。
100.请参阅图2与图12,进一步地,轮对除锈机还包括设置于第一除锈工位的第一限位机构82。第一限位机构82设有第一抵触部821与第二抵触部822。第一抵触部821与第二抵触部822分别用于与轮对10车轮12的相对两侧轮缘转动抵触配合。如此,第一限位机构82的第一抵触部821与第二抵触部822分别与轮对10车轮12的相对两侧轮缘对应转动抵触配合,从而便能限制轮对10的位置,同时不影响轮对10绕其轮轴11中心线自转,从而能保证除锈效果,除锈效率较高。
101.请再参阅图11与图12,进一步地,轮对除锈机还包括设置于第一转轮器81底部的底板83。第一限位机构82还包括第一推动机构823与第二推动机构824。第一抵触部821、第二抵触部822均可转动地设置于底板83上,第一推动机构823推动第一抵触部821转动并使得第一抵触部821与轮对10车轮12的其中一侧轮缘转动抵触,或者使得第一抵触部821远离于轮对10车轮12;第二推动机构824推动第二抵触部822转动并使得第二抵触部822带动轮对10离开第一转轮器81。当第一推动机构823推动第一抵触部821使得第一抵触部821与轮对10车轮12的其中一侧轮缘转动抵触,便对轮对10起到限位作用,避免轮对10如图12所示左右方向移动;当第一推动机构823推动第一抵触部821使得第一抵触部821与轮对10车轮12的其中一侧轮缘相分离,第一抵触部821不再对轮对10起到限位作用,此时第二推动机构824推动第二抵触部822带动轮对10移动离开第一转轮器81,并可以在第一转轮器81上装设下一个轮对10对下一个轮对10进行除锈操作。具体而言,第一抵触部821上与车轮12轮缘相接触的部位设有可转动的转盘,第一抵触部821通过转盘与车轮12轮缘相抵触。第二抵触部822的结构类似,在此不进行限定。
102.类似地,轮对除锈机还包括设置于第二除锈工位的第二转轮器91,第二转轮器91用于驱动轮对10以轮轴11中心线为轴心转动。如此,第三刷650对辐板孔部位121除锈过程中,第二转轮器91同步驱动轮轴11自转,从而便能实现对辐板孔部位121全方位除锈处理,除锈效果较好,除锈效率较高。
103.进一步地,类似于设置于第一除锈工位的第一限位机构82,轮对除锈机还包括设置于第二除锈工位的第二限位机构。第二限位机构能对位于第二转轮器91上方的轮对10起到限位作用,具体结构类似于第一限位机构82,在此不再赘述。
104.可以理解的,目前的除锈机对轮对10的辐板孔部位121除锈比较困难,通常是采用手动打磨的方式对辐板孔部位121除锈。但是手动打磨费时费力,增加工人劳动强度,同时,打磨效果不一致,不便于后期探伤操作。
105.请参阅图1、图2、图13与图14,图13示出了本发明一实施例的辐板除锈组件60的主视图,图14示出了图13所示的辐板除锈组件60的侧视局剖图。在一个实施例中,第二安装机架50包括立柱51。辐板除锈组件60还包括升降机构610与摆动机构620。升降机构610设置于立柱51上,并可沿立柱51做升降运动;摆动机构620设置于升降机构610上,并可随升降机构610升降,摆动机构620输出横向移动运动与摆动运动;旋转机构630设置于摆动机构620,并随摆动机构620运动,旋转机构630能够与轮对10的车轮12抵接,对辐板孔部位121除锈。
106.第二安装机架50为辐板除锈组件60的主体框架,用于实现辐板除锈组件60各个结构的安装。第二安装机架50安装在基准面上,这里的基准面可以是地面,可以是安装平台的表面等。具体地,第二安装机架50包括两个立柱51以及连接立柱51的连接梁52。两个立柱51沿竖直方向对称设置,连接梁52连接立柱51后,组成稳定的基础框架,以稳定支撑各个结构。此外,相应地,升降机构610、摆动机构620、旋转机构630均为两个,两个升降机构610、两个摆动机构620及两个旋转机构630均与两个立柱51一一对应设置。
107.具体地,两个升降机构610分别设置在两个立柱51上,两个摆动机构620分别安装在两个升降机构610的输出端,两个旋转机构630分别设置在两个摆动机构620的输出端。通过两个旋转机构630分别对两个车轮12的辐板孔部位121除锈。
108.升降机构610为辐板除锈组件60升降的主要部件。升降机构610的输出端安装摆动机构620,升降机构610可以带动摆动机构620及其上的旋转机构630同步做升降运动。辐板除锈组件60未除锈即处于初始位置时,升降机构610处于轮对除锈机的第二转轮器91的上方,使得旋转机构630与轮对10之间存在间距,避免轮对10进入转轮器时与旋转机构630发生干涉,保证辐板除锈组件60的使用性能。
109.对轮对10的辐板孔部位121除锈时,升降机构610输出下降运动,并带动摆动机构620及其上的旋转机构630同步下降,使得旋转机构630能够对准轮对10的辐板孔部位121,以对辐板孔部位121除锈。除锈完成后,升降机构610输出上升运动,并带动摆动机构620及其上的旋转机构630同步上升,使得旋转机构630远离轮对10,便于转轮器将轮对10推出。
110.摆动机构620用于输出横向移动运动与摆动运动。摆动机构620可运动设置于升降机构610的输出端,并且摆动机构620的输出端还安装旋转机构630。升降机构610带动摆动机构620下降到位后,摆动机构620可以输出横向移动运动,使得旋转机构630与轮对10的辐板孔部位121抵接。也就是说,摆动机构620可以提供压紧力,使得旋转机构630贴紧辐板孔部位121的除锈面,以便于辐板孔部位121对除锈。
111.当旋转机构630贴紧辐板孔部位121后,摆动机构620输出摆动运动,摆动机构620带动旋转机构630按照一定的幅度摆动,旋转机构630在摆动的过程中可以对轮对10的辐板孔部位121除锈。可以理解的是,摆动机构620摆动式可以控制旋转机构630的除锈宽度,使得旋转机构630尽可能大的触及辐板孔部位121的所有表面,保证辐板孔部位121的除锈效果。
112.旋转机构630为辐板除锈组件60除锈的主要部件。除锈时,旋转机构630与轮对10的辐板孔部位121抵接,旋转机构630转动时可以对辐板孔部位121除锈,达到除锈的目的,以便于轮对10后期的探伤操作。
113.本发明的辐板除锈组件60使用时,旋转机构630输出转动运动,升降机构610输出下降运动,升降机构610可带动摆动机构620及其上的旋转机构630下降,使得旋转机构630对准轮对10的辐板孔部位121,随后,摆动机构620带动旋转机构630横向移动,使得旋转机构630压紧辐板孔部位121的除锈面,随后摆动机构620带动旋转机构630摆动。通过摆动机构620的摆动以及旋转机构630的转动实现对辐板孔部位121的除锈。而且,在除锈的过程中,升降机构610也可带动摆动机构620与旋转机构630升降,以调节旋转机构630的高度,进而控制旋转机构630的除锈高度。
114.也就是说,辐板除锈组件60除锈时为三轴联动的结构,当旋转机构630与辐板孔部
位121抵接后,旋转机构630的旋转运动、摆动机构620的摆动运动以及升降机构610的升降运动,调节旋转机构630的运动范围,使得旋转机构630能够最大化的贴合辐板孔部位121的除锈面,保证除锈效果,同时,还能提高除锈效果。可以理解的,旋转机构630通过钢丝刷除锈,升降机构610、旋转机构630以及摆动机构620带动钢丝刷三轴运动,这一点在后文详述。
115.辐板孔部位121除锈完成后,摆动机构620横向移动,使得旋转机构630远离辐板孔部位121,同时,摆动机构620停止摆动;随后控制旋转机构630停止转动,并控制升降机构610带动摆动机构620以及旋转机构630上升。当升降机构610运动至初始位置后,转轮器将轮对10推出以便于轮对10进行下一工序的操作。而且,下一待清洗的轮对10可以进入到转轮器中。
116.上述实施例的辐板除锈组件60,通过升降机构610、摆动机构620以及旋转机构630的配合,实现辐板孔部位121的除锈,有效的解决目前通过手动打磨辐板孔部位121导致的费时费力问题,无需操作人员手动打磨辐板座,实现辐板孔部位121的自动化除锈,降低操作人员的劳动强度,保证除锈质量,便于后期轮对10的探伤操作。
117.请参阅图1、图13与图14,在一个实施例中,升降机构610包括升降动力源611以及与升降动力源611连接的升降座612,升降座612可移动设置于轮对除锈机的立柱51,升降动力源611驱动升降座612沿立柱51升降,升降座612上安装摆动机构620。
118.升降动力源611为升降机构610的升降运动提供动力。可选地,升降动力源611为气缸、液压缸、电机等等。示例性地,升降动力源611为升降气缸。当然,在本发明的其他实施方式中,升降动力源611还可为升降电机等。升降座612与升降动力源611的输出端连接,升降动力源611可以驱动升降座612做升降运动。
119.而且,升降座612还设置在轮对除锈机的立柱51上,立柱51沿竖直方式设置,升降座612可滑动设置于立柱51上,保证升降座612的升降运动轨迹准确,避免升降座612的运动发生窜动,进而保证升降座612带动带动摆动机构620与旋转机构630能够准确运动。可以理解的,升降座612的结构形式原则上不受限制,只要能够实现连接升降动力源611以及摆动机构620即可。示例性地,升降座612为安装平台或安装块等。
120.在一实施例中,升降机构610还包括导轨613,导轨613设置于立柱51,升降座612具有与导轨613配合的滑动部,升降座612通过滑动部沿导轨613滑动。导轨613起导向作用,导轨613设置在立柱51上,升降座612安装有滑动部,通过滑动部沿导轨613滑动对升降座612的升降运动进行导向,保证升降座612的运动轨迹准确,避免升降座612发生窜动;同时还能减小升降座612与立柱51之间的摩擦,便于升降座612的升降运动。
121.可选地,滑动部可以为设置于升降座612的滑槽,滑槽与导轨613滑动配合。当然,滑动部还可以为滑块,滑块与导轨613滑动配合,同时,滑块连接升降座612。
122.请参阅图1、图13与图14,在一个实施例中,升降机构610还包括升降感应组件,升降感应组件设置于升降动力源611,用于检测升降动力源611输出的升降高度。
123.升降感应件用于判断升降机构610的升降运动是否到位,便于旋转机构630对准轮对10的辐板孔部位121。
124.可选地,升降感应组件包括升降配合件与升降感应件,升降配合件设置于升降动力源611的伸出部件上,升降感应件设置在升降动力源611的外壳。升降动力源611的伸出部件运动使旋转机构630对应轮对10的辐板孔部位121时,升降感应件能够检测到升降配合
件,升降感应件反馈至轮对除锈机的控制器,通过控制器控制升降动力源611停止运动,保证旋转机构630运动到位,并保证准确性。
125.示例性地,升降动力源611为升降气缸,升降配合件为设置于升降气缸的气缸杆上的磁环,升降感应件为设置于升降气缸外壳的感应开关。通过磁环与光点感应开关的配合实现升降动力源611运动的限位。当然,升降配合件还铁片,升降配合件为光电感应开关等限位开关。
126.请参阅图1、图13与图14,在一个实施例中,摆动机构620包括托架621以及设置托架621的摆动组件622。托架621与升降座612连接,摆动组件622设置于托架621上,摆动组件622与旋转机构630连接,并带动旋转机构630摆动。
127.托架621起承载作用,用于承载摆动机构620与旋转机构630的各零部件。托架621安装在升降座612上,升降动力源611驱动升降座612做升降运动时,升降座612可带动托架621同步升降,带动其上的各零部件做升降运动。摆动组件622设置在托架621上,摆动组件622可以输出摆动运动。摆动组件622的输出端与旋转机构630连接,摆动机构620摆动时可以带动旋转机构630同步运动,增加旋转机构630与辐板孔部位121的接触面积,便于辐板孔部位121的除锈操作。
128.请参阅图1、图13与图14,在一个实施例中,摆动机构620还包括进给组件623,进给组件623设置于摆动组件622与托架621之间,进给组件623用于带动摆动组件622横向移动,使旋转机构630接触或远离辐板孔部位121的除锈面。
129.进给组件623设置在托架621与摆动组件622之间,进给组件623可以使摆动组件622相对于托架621横向移动,进而摆动组件622可以带动旋转机构630横向移动。以图1所示的方式为例进行说明,进给组件623可以带动摆动组件622以及旋转机构630向前运动或向后运动。进给组件623向前运动时,旋转机构630能够压紧辐板孔部位121;进给组件623向后运动时,旋转机构630能够远离辐板孔部位121。
130.具体地,进给组件623处于初始位置时,旋转机构630与辐板孔部位121的除锈面之间存在一定的间距。进给组件623驱动摆动组件622及旋转机构630横向移动,使旋转机构630逐渐靠近辐板孔部位121,直至旋转机构630能够压紧辐板孔部位121的除锈面,以便于旋转机构630对辐板孔部位121除锈。除锈完成后,进给组件623驱动摆动组件622及旋转机构630横向移动,使旋转机构630逐渐远离辐板孔部位121。
131.请参阅图1、图13与图14,在一个实施例中,进给组件623包括滑动件6233、可移动设置于滑动件6233的滑台6232以及与滑台6232连接的进给动力源6231。进给动力源6231设置于托架621,用于驱动滑台6232沿滑动件6233移动,摆动组件622设置于滑台6232。
132.进给动力源6231为进给组件623的横向运动提供动力。进给动力源6231设置在托架621上,进给动力源6231的输出端与滑台6232连接,滑动件6233固定在托架621上,滑台6232可滑动安装在滑动件6233上。进给动力源6231驱动滑台6232沿滑动件6233横向移动,进而滑台6232可带动其上的摆动组件622以及旋转机构630同步横向移动,使得旋转机构630接触或远离辐板孔部位121。
133.可选地,滑动件6233可以为直线轴承,直线轴承连接托架621与滑台6232,实现滑台6232相对于托架621的横向移动。可选地,滑动件6233还可为滑轨,滑台6232具有与滑轨滑动配合的滑槽。当然,在本发明的其他实施方式中,滑动件6233还可为其他能够实现滑动
运动的部件。
134.可以理解的,滑台6232的结构原则上不受限制,只要能够实现安装摆动组件622以及沿滑动件6233滑动即可。示例性地,滑台6232为安装块,当然,在本发明的其他实施方式中,滑台6232还可为安装平台、安装板等结构。
135.在一个实施例中,进给组件623还包括进给感应件,进给感应件设置于进给动力源6231,进给感应件用于检测进给动力源6231输出的进给距离。进给感应件用于判断进给组件623的进给运动是否到位,便于旋转机构630压紧辐板孔部位121的除锈面。
136.可选地,进给感应件包括进给配合件与进给感应件,进给配合件设置于进给动力源6231的伸出部件上,进给感应件设置在进给动力源6231的外壳。进给动力源6231的伸出部件运动使旋转机构630压紧轮对10的辐板孔部位121时,进给感应件能够检测到进给配合件,进给感应件反馈至轮对除锈机的控制器,通过控制器控制进给动力源6231停止运动,保证旋转机构630运动到位,并保证准确性。
137.示例性地,进给动力源6231为进给气缸,进给配合件为设置于进给气缸的气缸杆上的磁环,进给感应件为设置于进给气缸外壳的感应开关。通过磁环与光点感应开关的配合实现进给动力源6231运动的限位。当然,进给配合件还可以是铁片,进给配合件还可以为光电感应开关等限位开关。
138.在一实施例中,摆动机构620还包括连接组件640。连接组件640连接两个摆动机构620的托架621,使两个托架621同步升降。连接组件640可以保证两个托架621运动的同步性,使得两个旋转机构630步对轮对10的辐板孔部位121除锈,保证除锈过程的一致性。具体地,轮对10运动至转轮器后,轮对除锈机的控制器可以同时控制两个升降动力源611驱动升降座612下降,使得两个托架621同时带动对应的摆动组件622以及旋转机构630下降。
139.同时,连接组件640还能够起到支撑的作用。托架621的一端通过升降动力源611支撑,托架621的另一端通过连接组件640连接到另一托架621,避免托架621的端部偏坠。
140.在一实施例中,连接组件640包括连接板以及固定件,连接板连接两个托架621,固定件固定托架621与连接板。连接板的另一端与其中一个托架621连接,连接板的另一端与另一个托架621连接,通过固定件分别连接两个托架621以及连接板实现两个托架621的同步运动。
141.可选地,固定件为螺纹件。可以理解的,连接板的形式原则上不受限制,只要能够实现两个托架621连接即可。本实施例中,连接板呈平板状。
142.在一实施例中,摆动组件622包括摆动动力源6221、第三传动组件6222以及摆轴6223,摆动动力源6221设置于滑台6232,第三传动组件6222设置于摆动动力源6221的输出端,并连接摆轴6223,摆轴6223上安装旋转机构630摆动动力源6221通过第三传动组件6222与摆轴6223带动旋转机构630摆动。
143.摆动动力源6221为摆动组件622的运动提供动力。摆动动力源6221可以输出摆动运动,而且,摆动动力源6221可调节摆动的角度范围,以满足不同工况的使用需求。摆轴6223可转动设置在滑台6232上,摆动动力源6221的输出端通过第三传动组件6222与滑台6232传动连接。摆动动力源6221可通过第三传动组件6222带动摆轴6223摆动,进而通过摆轴6223带动旋转机构630摆动,使得旋转机构630最大化贴合辐板孔部位121的除锈面,保证除锈效果及效率。
144.可选地,摆动动力源6221为气缸、液压马达、油缸、电机等。示例性地,摆动动力源6221为摆动气缸,通过摆动气缸输出摆动运动。当然,在本发明的其他实施方式中,摆动动力源6221还可为摆动电机。
145.可以理解的是,第三传动组件6222的形式原则上不受限制,只要能够实现摆动运动的传递即可。在一实施例中,第三传动组件6222为齿轮传动组件、带传动组件、链传动组件或连杆传动组件。
146.示例性地,第三传动组件6222为齿轮传动组件,包括主动齿轮62221与从动齿轮62222,主动齿轮62221与从动齿轮62222相啮合,主动齿轮62221设置于摆动动力源6221的输出端,从动齿轮62222设置于摆轴6223上。摆动动力源6221驱动主动齿轮62221摆动,进而主动齿轮62221通过啮合关系带动从动齿轮62222摆动,使得从动齿轮62222带动摆轴6223摆动。
147.在一实施例中,旋转机构630包括旋转动力源631与设置于旋转动力源631端部的连接轴632。第三刷650设置于连接轴632上。旋转动力源631设置于摆轴6223,旋转动力源631通过连接轴632驱动钢丝刷转动,以对辐板孔部位121除锈。旋转动力源631驱动钢丝刷转动可以保证钢丝刷均匀磨损。
148.旋转动力源631为旋转机构630提供旋转动力,旋转动力源631设置在摆轴6223上,可以随摆轴6223摆动。旋转动力源631的输出端通过连接轴632连接钢丝刷,使得钢丝刷对准轮对10的辐板孔部位121,通过钢丝刷对辐板孔部位121进行除锈操作。除锈时,钢丝刷与辐板孔部位121的除锈面接触,旋转动力源631通过连接轴632带动钢丝刷转动,以对辐板孔部位121进行除锈操作。
149.当轮对10进入第二转轮器91后,旋转动力源631通过连接轴632驱动钢丝刷转动,随后,升降动力源611驱动升降座612沿滑轨下降,升降座612下降的同时可以带动托架621同步下降,使托架621上旋转机构630的钢丝刷对准轮对10的辐板孔部位121。随后,进给动力源6231输出横向运动,推动滑台6232沿滑动件6233横向滑动,使钢丝刷压紧在辐板孔部位121的除锈面,随后,摆动动力源6221通过第三传动组件6222驱动摆轴6223转动,进而摆动钢丝刷摆动,使得钢丝刷在辐板孔部位121中摆动。
150.除锈清洗时需要进行三轴联动,即升降动力源611驱动升降座612做升降运动,摆动动力源6221驱动摆轴6223摆动,旋转动力源631驱动钢丝刷转动,以此限定钢丝刷的除锈范围,使得钢丝刷最大化贴合辐板孔部位121的除锈面,保证钢丝刷均匀磨损,提高除锈效率,保证除锈效果。
151.除锈完成后,进给动力源6231驱动滑台6232滑动,使得钢丝刷脱离辐板孔部位121,同时,摆动动力源6221停止工作。随后,旋转动力源631停止工作,并且,升降动力源611带动驱动座带动摆动机构620以及旋转机构630上升,复位至初始位置。然后,第二转轮器91可以将轮对10推出,以便于轮对10进行下一工序的操作。而且,下一待清洗的轮对10可以进入到第二转轮器91中。
152.请再参阅图1与图2,一种上述任一实施例的轮对除锈机的除锈方法,包括如下步骤:
153.步骤s100、将轮对10送入到第一除锈工位,由轴身除锈组件30的第一刷350对轴身111进行除锈处理;
154.步骤s200、将轮对10送入到第二除锈工位,由辐板除锈组件60的第三刷650对辐板孔部位121进行除锈处理,
155.上述的轮对除锈机的除锈方法,一方面,能实现对轮对10的各个探伤部位均进行除锈处理,且无需采用脱漆剂,从而能够减小环境污染;另一方面,使第一刷350以恒定压力压迫于轮对轴身111并转动式除锈,除锈效果较好,同时除锈脱漆效率较高。第二刷450以恒定压力压迫于防尘板座112并转动式除锈,除锈效果较好,同时除锈脱漆效率较高。
156.进一步地,在步骤s100之前包括步骤:
157.步骤s91、检测轮对10的轴体插入段113上装设的轮对轴承13是否退卸;
158.步骤s92、当轮对10的轴体插入段113上装设的轮对轴承13未退卸时,推拉机构740驱动防护罩720移动带动防护罩720移动并套设到轮对轴承13与防尘板座112外;
159.并在步骤s100中,由轴身除锈组件30的第一刷350对轴身111进行除锈处理,板座除锈组件40的第二刷450不对防尘板座112进行除锈处理;
160.步骤s93、当轮对10的轴体插入段113上装设的轮对轴承13退卸时,推拉机构740停止动作,步骤s100中还包括步骤:由板座除锈组件40的第二刷450对防尘板座112进行除锈处理。
161.进一步地,在对轮对轴身111进行除锈工作时,通过第一移动机构360移动第一支架340以使得第一刷350靠近于轮对轴身111与轮对轴身111相接触,并以恒定大小的压力压迫于轮对轴身111上,第一伺服电机320驱动第一传动轴330转动带动第一刷350转动对轮对轴身111进行除锈处理;
162.在防尘板座112进行除锈工作时,通过第二移动机构460移动第二支架440以使得第二刷450靠近于防尘板座112与防尘板座112相接触,并以恒定大小的压力压迫于防尘板座112上,第二伺服电机420驱动第二传动轴430转动带动第二刷450转动对防尘板座112进行除锈处理。
163.进一步地,推拉机构740驱动防护罩720移动带动防护罩720移动并套设到轮对轴承13与防尘板座112外步骤之后还包括步骤:控制轮对除锈机进行除锈作业。
164.更进一步地,轮对除锈机除锈作业结束之后还包括步骤:推拉机构740反向移动复位,防护罩720从轮对轴承13上移出并复位到初始位置,以进行下一个轮对10的防护工作。
165.在一个实施例中,第一刷350以恒定大小的压力压迫于轮对轴身111的具体方法包括步骤:
166.检测第一伺服电机320的工作电流;
167.当检测到第一伺服电机320的工作电流达到设定电流时,控制第一移动机构360停止进给,使得第一刷350与轮对轴身111的相对位置保持固定;
168.当检测到第一伺服电机320的工作电流大于设定电流时,控制第一移动机构360动作,使得第一刷350朝向远离于轮对轴身111的方向移动调整位置;
169.当检测到第一伺服电机320的工作电流小于设定电流时,控制第一移动机构360动作,使得第一刷350朝向靠近于轮对轴身111的方向移动进给调整位置;
170.第二刷450以恒定大小的压力压迫于防尘板座112的具体方法包括步骤:
171.检测第二伺服电机420的工作电流;
172.当检测到第二伺服电机420的工作电流达到设定电流时,控制第二移动机构460停
止进给,使得第二刷450与防尘板座112的相对位置保持固定;
173.当检测到第二伺服电机420的工作电流大于设定电流时,控制第二移动机构460动作,使得第二刷450朝向远离于防尘板座112的方向移动调整位置;
174.当检测到第二伺服电机420的工作电流小于设定电流时,控制第二移动机构460动作,使得第二刷450朝向靠近于防尘板座112的方向移动进给调整位置。
175.需要说明的是,设定电流根据实际需求进行设置,在此不进行限制。
176.如此,使得第一刷350以恒定压力压迫于轮对轴身111并维持恒定速度转动进行除锈操作,对轮对轴身111的除锈效果较好,且除锈效率较高。此外,第二刷450以恒定压力压迫于防尘板座112并维持恒定速度转动进行除锈操作,对防尘板座112的除锈效果较好,且除锈效率较高。
177.在一个实施例中,在第一伺服电机320驱动第一传动轴330转动带动第一刷350转动对轮对轴身111进行除锈处理的同时还包括步骤:驱动第一移动机构360沿着轮轴11中心线的方向来回移动,以使得第一刷350沿着轮轴11中心线的方向来回移动;
178.在第二伺服电机420驱动第二传动轴430转动带动第二刷450转动对防尘板座112进行除锈处理的同时还包括步骤:驱动第二移动机构460沿着轮轴11中心线的方向来回移动,以使得第二刷450沿着轮轴11中心线的方向来回移动。
179.在一个实施例中,在第一伺服电机320驱动第一传动轴330转动带动第一刷350转动对轮对轴身111进行除锈处理的同时还包括步骤:驱动轮对10绕轮轴11中心线转动。
180.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
181.以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
182.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
183.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
184.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
185.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
186.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1