玻璃板的端面加工装置的制作方法
1.本实用新型涉及玻璃板的端面加工装置以及玻璃板的制造方法。
背景技术:
2.近年,为了响应对于液晶显示器等的生产效率的改善要求,对该显示器等所使用的玻璃基板的制造效率的改善要求有所提高。在此,在玻璃基板的制造中进行有从大型的玻璃原板(成形原板)切割出一片或者多片玻璃基板的作业。从而能够取得所需的尺寸的玻璃基板。
3.一方面,由于从玻璃原板切割出的玻璃基板的端面通常是切断面或者折割面,所以存在微小的划伤(缺陷)的情况较多。如果玻璃基板的端面有划伤的话,则会由于该划伤而产生破裂等,因此为了防止该情况而对玻璃基板的端面施以磨削加工(粗加工)与研磨加工(精加工)。
4.作为该类型的端面加工所使用的玻璃板的端面加工装置,例如专利文献1中公开了所谓的定压式端面加工装置,其具备:能够摆动的臂构件,其支承加工工具;以及致动器(按压力产生要件),其产生经由该臂构件从加工工具作用于玻璃板的端面的按压力。
5.现有技术文献
6.专利文献
7.专利文献1:国际公开第2013/187400号
技术实现要素:
8.实用新型要解决的课题
9.一般在定压式的端面加工装置中,例如如果致动器的驱动力过大,则有加工工具的按压力的难以精细调整的问题。特别是磨削时,由于加工工具的加工能力一般是高的,因此如果加工工具的按压力的精细调整不充分,则加工量(切削量)会大幅增加或减少,可能无法实现所期望的加工。
10.本实用新型的课题是实现在加工玻璃板的端面时加工工具的按压力的精细调整。
11.用于解决课题的手段
12.为解决上述的课题所提出的本实用新型涉及一种通过加工工具对玻璃板的端面进行加工的玻璃板的端面加工装置,其特征在于,具备:能够摆动的臂构件,其支承加工工具;致动器,其产生用于使加工工具按压玻璃板的端面的驱动力;以及连杆机构,其将致动器的驱动力向臂构件传递,连杆机构具备:第一连杆构件,其能够在致动器的作用下摆动;以及第二连杆构件,其以能够摆动的方式分别与臂构件以及第一连杆构件连结,在加工工具与玻璃板的端面相接触的状态中,第一连杆构件的长度方向的正交方向与第二连杆构件的长度方向所成的角小于臂构件的长度方向的正交方向与第二连杆构件的长度方向所成的角。
13.对于上述的结构,在致动器使加工工具向按压玻璃板的端面的方向移动的情况
下,第一连杆构件在致动器的作用下摆动,臂构件被第二连杆构件按压,相比第一连杆构件按压第二连杆构件的力的大小,作用于臂构件的力之中向臂构件的摆动方向作用的力的分量的大小是小的。同样,在致动器使加工工具向离开玻璃板的端面的方向移动的情况下,第一连杆构件在致动器作用下摆动,臂构件被第二连杆构件牵引,相比第一连杆构件牵引第二连杆构件的力的大小,作用于臂构件的力之中向臂构件的摆动方向作用的力的分量的大小是小的。因此,即使在致动器的驱动力大的情况下,也能够使向臂构件的摆动方向作用的力较小,因此可以精细地调节加工工具对玻璃板的端面的按压力。
14.对于上述的结构,优选加工工具是磨削用的砂轮。
15.磨削用的砂轮一般相比研磨用的砂轮在按压玻璃板的端面的按压力作用下加工量容易较大变动。与之相对的,像本实用新型这样的结构能够精细地调整加工工具按压玻璃板的端面的按压力,即使是磨削用的砂轮也能容易地控制为所需的加工量。
16.为解决上述的课题所提出的本实用新型涉及一种玻璃板的制造方法,该制造方法包括利用端面加工装置通过加工工具对玻璃板的端面进行加工的端面加工工序,其特征在于,端面加工装置具备:能够摆动的臂构件,其支承加工工具;致动器,其产生用于使加工工具按压玻璃板的端面的驱动力;以及连杆机构,其将致动器的驱动力向臂构件传递,连杆机构具备:第一连杆构件,其能够在致动器的作用下摆动;以及第二连杆构件,其以能够摆动的方式分别与臂构件以及第一连杆构件连结,在端面加工工序中,在加工工具与玻璃板的端面相接触的状态下,第一连杆构件的长度方向的正交方向与第二连杆构件的长度方向所成的角小于臂构件的长度方向的正交方向与第二连杆构件的长度方向所成的角。
17.如此,基于与上述结构同样的理由,能够在端面加工工序中精细地调整加工工具对玻璃板的端面的按压力。
18.实用新型效果
19.根据本实用新型,能够在加工玻璃板的端面的情况下实现加工工具的按压力的精细调整。
附图说明
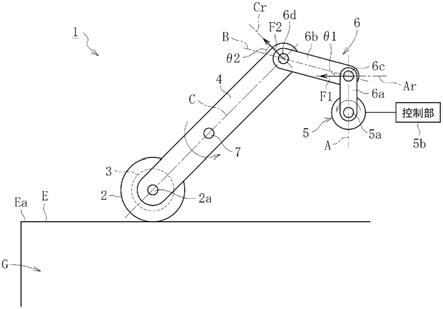
20.图1是示出本实用新型的实施方式所涉及的端面加工装置的俯视图。
21.图2是将图1的端面加工装置的一部分放大表示的俯视图。
22.图3是将图1的端面加工装置的一部分放大表示的俯视图。
23.图4是将本实用新型的其他实施方式所涉及的端面加工装置的一部分放大表示的俯视图。
24.图5是将本实用新型的其他实施方式所涉及的端面加工装置的一部分放大表示的俯视图。
25.图6是将本实用新型的其他实施方式所涉及的端面加工装置的一部分放大表示的俯视图。
具体实施方式
26.以下,参照附图对本实用新型进行说明。
27.如图1所示,端面加工装置1具备:电机3,其驱动作为加工工具的砂轮2旋转;臂构
件4,其以使砂轮2能够旋转的方式支承砂轮2;伺服电机5,其作为致动器产生用于使砂轮2按压玻璃板g的端面e的驱动力;以及连杆机构6,其将伺服电机5的驱动力向臂构件4传递。这样的端面加工装置1被称为定压式。
28.驱动砂轮2旋转的电机3可以使用同步电机、感应电机、伺服电机等,但不限于这些电机。
29.臂构件4被支承轴构件7支承为旋转自如,并且能够以支承轴构件7 为中心摆动。支承轴构件7支承臂构件4的中间部分。臂构件4的一个端部支承电机3,并且经由该电机3支承砂轮2。臂构件4的另一个端部与连杆机构6相连结。需要说明的是,虽然省略了图示,但在臂构件4的摆动轨道上设置有限制臂构件4的摆动范围的限位器。限位器能够在砂轮2 与玻璃板g的端面e接触时从臂构件4退避。
30.用于将砂轮2按压于玻璃板g的端面e的伺服电机5具备能够向正反方向旋转的电机轴5a以及控制部5b,并且进行反馈控制。
31.连杆机构6具备能够分别摆动的第一连杆构件6a以及第二连杆构件 6b。第一连杆构件6a的一个端部固定于伺服电机5的电机轴5a,第一连杆构件6a的另一个端部经由第一接头6c而摆动自如地与第二连杆构件6b 的一个端部相连结。换句话说,第一连杆构件6a凭借电机轴5a的旋转以电机轴5a为中心摆动。第二连杆构件6b的另一个端部经由第二接头6d 摆动自如地与臂构件4的另一个端部连结。需要说明的是,在本实施方式中,第二接头6d的中心、支承轴构件7的中心以及砂轮2的旋转轴2a的中心排列在同一直线上。
32.如图2所示,若伺服电机5的电机轴5a向逆时针方向旋转,则臂构件4在连杆机构6的作用下也以支承轴构件7为中心向逆时针方向旋转。砂轮2随之向按压玻璃板g的端面e的方向移动,从而使砂轮2按压玻璃板g的端面e的力的增加。另一方面,如图3所示,若伺服电机5的电机轴5a向顺时针方向旋转,则臂构件4在连杆机构6的作用下也以支承轴构件7为中心顺时针旋转。砂轮2随之向离开玻璃板g的端面e的方向移动,从而使砂轮2按压玻璃板g的端面e的力减少。
33.控制部5b通过反馈控制来监视伺服电机5的电机轴5a的速度、转矩以及位置。使伺服电机5的电机轴5a对应该速度、转矩以及位置而向正反方向旋转,从而控制砂轮2的位置与按压力。
34.砂轮2例如可以是以端面e的倒角为主要目的的磨削用的砂轮,也可以是以整平端面e的微小的凹凸为主要目的的研磨用的砂轮。研磨用的砂轮的磨粒的粒度等于或大于磨削用的砂轮的磨粒的粒度。磨削用的砂轮的磨粒的粒度例如可以为#100~#1000,研磨用的砂轮的磨粒的粒度例如可以为#200~#1000。砂轮2的直径例如可以为100~200mm。
35.如图1所示,在本实施方式中,两个端面加工装置1配置于隔着玻璃板g而对置的位置。也就是说,玻璃板g的对置的两边的端面e得以被分别同时地进行端面加工。需要说明的是,在玻璃板g的一边可以配置多个端面加工装置1。在该情况下,各端面加工装置1的砂轮2的种类可以是相同的也可以是不同的。例如可以将在先加工端面e的上游侧的端面加工装置1的砂轮2设为磨削用的砂轮,并且将随之在后加工端面e的下游侧的端面加工装置1的砂轮2设为研磨用的砂轮。
36.作为端面加工装置1的加工对象的玻璃板g例如具有矩形的板形状。玻璃板g的厚度尺寸例如0.05mm~10mm为优选,0.2mm~0.7mm为更优选。当然,能够适用本实用新型的玻
璃板g不限于上述形状。例如具有矩形以外的形状(例如多边形)的玻璃板、厚度尺寸为0.05mm~10mm以外尺寸的玻璃板也可以适用于本发明。
37.玻璃板g可以相对砂轮2沿规定的进给方向x相对地移动。需要说明的是,在图1中示出了玻璃板g向进给方向x移动而砂轮2固定的情况。当然,也可以玻璃板g固定而砂轮2向与进给方向x相反方向移动或者玻璃板g和砂轮2双方都移动。
38.接下来,对使用上述结构的端面加工装置1的玻璃板的制造方法进行说明。
39.本实施方式所涉及的制造方法包括:准备工序,准备玻璃板g;以及端面加工工序,对已准备好的玻璃板g的端面e进行加工。需要说明的是,可以在端面加工工序之后进行玻璃板g的清洗、检查、捆包等工序。也可以单独实施端面加工工序。
40.在准备工序中,首先通过公知的成形方法得到成形原板。之后,按规定尺寸切割该成形原板,从而得到作为端面加工装置1的加工对象的玻璃板g。例如能够利用溢流下拉法、狭缝下拉法、再拉法等下拉法与浮法作为成形方法。其中,溢流下拉法由于能够使两侧的表面成为锻造面从而实现高表面品质而优选。玻璃板g被用于例如液晶显示器等平板显示器用的玻璃基板。
41.在端面加工工序中,首先通过伺服电机5的旋转将旋转状态的砂轮2 配置于规定的位置。该状态下,沿进给方向x输送玻璃板g,从而使砂轮 2与玻璃板g的端面e接触。该加工开始时(加工图1的附图标记ea所表示的部分时),由于伴随砂轮2与玻璃板g的端面e的接触而产生的冲击,砂轮2欲从玻璃板g离开。为了应对这种情况,控制部5b进行伺服电机5的电机轴5a的速度以及转矩的反馈控制(例如pid控制)。具体地说,控制部5b基于伺服电机5的电机轴5a的速度而检测出与砂轮2共同移动的臂构件4的动作。对应该检测结果,控制部5b控制伺服电机5的电机轴5a的速度以及转矩从而抑制臂构件4的移动。由此,调整砂轮2 的按压力从而使砂轮2不从玻璃板g的端面e离开。因此能够防止在加工开始时砂轮2的跳动。
42.并且,即使在玻璃板g的端面e之中的输送方向的中间部分(附图标记ea所示部分与附图标记eb所示部分之间的部分)的加工中,也进行伺服电机5的电机轴5a的速度以及转矩的反馈控制。此时,变更速度控制与转矩控制的比率,将转矩控制的比率提高。该比率的变更是通过变更增益的设定而能够得以实施的。从而能够在输送方向上维持玻璃板g的端面 e的加工量为恒定。
43.若上述的端面加工结束,则砂轮2与玻璃板g的端面e的接触解除,从而使伺服电机5的电机轴5a的转矩急剧地减少。因此,加工结束时(加工附图标记eb所示部分时),为了使砂轮2的位置恒定,控制部5b进行伺服电机5的电机轴5a的速度以及转矩的反馈控制。需要说明的是,凭借控制部5b的上述的控制方法是一例,不限于此。
44.如图2以及图3所示,在端面加工工序中,存在伺服电机5的电机轴 5a逆时针旋转从而使砂轮2向按压玻璃板g的端面e的方向移动的情况、与伺服电机5的电机轴5a顺时针旋转从而使砂轮2向离开玻璃板g的端面e的方向移动的情况。
45.如果将第一接头6c的第一连杆构件6a的长度方向a的正交方向ar 与第二连杆构件6b的长度方向b所成的角设为θ1,并且将第二接头6d 的臂构件4的长度方向c的正交方向cr与第二连杆构件6b的长度方向b 所成的角设为θ2,则θ1<o2的关系得以成立。从玻璃板g的端面e的加工开始时到加工结束时之间始终满足该θ1以及o2的角度关系。
46.在此,θ1以及θ2意味着在砂轮2与玻璃板g的加工对象的端面e接触状态下的角度。并且,第一连杆构件6a的长度方向a意味着连接伺服电机5的电机轴5a的中心(第一连杆构件6a的摆动中心)与第一接头6c 的中心的直线的方向,第二连杆构件6b的长度方向b意味着连接第一接头6c的中心与第二接头6d的中心的直线的方向,臂构件4的长度方向c 意味着连接第二接头6d的中心与支承轴构件7的中心(臂构件4的摆动中心)的直线的方向。
47.如图2所示,在砂轮2向按压方向移动的情况下,第一连杆构件6a 按压第二连杆构件6b的力(严格来说是按压第一接头6c的力)f1是与第一连杆构件6a的长度方向a的正交方向ar平行的方向。另一方面,作用于通过第二连杆构件6b按压的臂构件4的力(严格来说是作用于第二接头6d的力)之中,使臂构件4绕逆时针摆动的力f2是与臂构件4的长度方向c的正交方向cr平行的方向。因此,f2=f1cosθ2/cosθ1的关系得以成立,由于θ1比θ2小,因此f2也比f1小。
48.同样,如图3所示,砂轮2向离开方向移动的情况下,第一连杆构件 6a牵引第二连杆构件6b的力(严格来说是牵引第一接头6c的力)f3是与第一连杆构件6a的长度方向a的正交方向ar平行的方向(与f1相反的方向)。另一方面,作用于通过第二连杆构件6b牵引的臂构件4的力(严格来说是作用于第二接头6d的力)之中,使臂构件4绕顺时针摆动的力 f4是与臂构件4的长度方向c的正交方向cr平行的方向(与f2相反的方向)。因此,f4=f3cosθ2/cosθ1的关系得以成立,由于θ1比θ2小,因此f4比f3小。
49.因此,即使伺服电机5的驱动力(输出范围)大,也由于能够使作用于臂构件4的力变小,从而能够精细的调整砂轮2按压玻璃板g的端面e 的按压力。
50.θ2是高于0
°
的角度即可,θ1是例如0
°
以上即可。虽然增加θ2-θ1能够更精细的调整按压力,但也会减少最大按压力。出于同时兼顾两方的观点,优选θ2-θ1为例如5~85
°
,并且15~75
°
为更优选,25~65
°
为最优选。优选cosθ2/cosθ1为例如0.2~0.98,并且0.4~0.96为更优选,0.6~0.94 为最优选。
51.需要说明的是,θ1以及θ2的大小可以通过例如变更臂构件4、第一连杆构件6a以及第二连杆构件6b的长度方向的尺寸、伺服电机5的电机轴5a以及支承轴构件7的安装位置而得以调整。
52.虽然以上对本实用新型的实施方式进行了说明,但本实用新型所涉及的玻璃板的端面加工装置以及制造方法当然不限于该方式,并且能够在本实用新型的范围内采取各种方式。
53.在上述的实施方式中,虽然说明了在臂构件4的第二接头6d、支承轴构件7以及砂轮2的旋转轴2a排列在同一直线上的情况,但臂构件4也可以为连接第二接头6d的中心与支承轴构件7的中心的直线与连接支承轴构件7的中心与砂轮2的旋转轴2a的中心的直线不排列在同一直线上而形成小于180
°
的角的形状。但是,即使在该情况下,臂构件4的长度方向c也被定义为连接第二接头6d的中心与支承轴构件7的中心而成的直线的方向。
54.在上述的实施方式中虽然作为加工工具例示了砂轮2,但是加工工具只要能够加工玻璃板g的端面e即可,也可以为砂轮以外的工具。
55.在上述实施方式中,虽然作为致动器例示了具有电机轴5a的伺服电机5,但是致动器也可以是气压致动器、液压致动器、机电致动器等伺服电机以外的公知的致动器。
56.在上述的实施方式中,虽然在图2以及图3中例示了以下情况:第一连杆构件6a的
长度方向a的正交方向ar具有从第二连杆构件6b的长度方向b逆时针旋转θ1的角度,并且臂构件4的长度方向c的正交方向cr 具有从第二连杆构件6b的长度方向b顺时针旋转θ2的角度,但是以第二连杆构件6b的长度方向b作为基准的θ1以及θ2的方向没有特别限定。
57.换句话说,如图4所示那样,臂构件4的长度方向c的正交方向cr 也可以具有从第二连杆构件6b的长度方向b逆时针旋转θ2的角度(θ2 的方向是相反的)。
58.并且,如图5所示,第一连杆构件6a的长度方向a的正交方向ar 也可以具有从第二连杆构件6b的长度方向b顺时针旋转θ1的角度(θ1 的方向是相反的)。
59.并且,如图6所示,第一连杆构件6a的长度方向a的正交方向ar 可以具有从第二连杆构件6b的长度方向b顺时针旋转θ1的角度,并且臂构件4的长度方向c的正交方向cr具有从第二连杆构件6b的长度方向b 逆时针旋转θ2的角度(θ1以及θ2的方向是相反的)。
60.附图标记说明:
[0061]1ꢀꢀꢀꢀ
端面加工装置
[0062]2ꢀꢀꢀꢀ
砂轮(加工工具)
[0063]3ꢀꢀꢀꢀ
电机
[0064]4ꢀꢀꢀꢀ
臂构件
[0065]5ꢀꢀꢀꢀ
伺服电机(致动器)
[0066]
5a
ꢀꢀꢀ
电机轴
[0067]
5b
ꢀꢀꢀ
控制部
[0068]6ꢀꢀꢀꢀ
连杆机构
[0069]
6a
ꢀꢀꢀ
第一连杆构件
[0070]
6b
ꢀꢀꢀ
第二连杆构件
[0071]
6c
ꢀꢀꢀ
第一接头
[0072]
6d
ꢀꢀꢀ
第二接头
[0073]7ꢀꢀꢀꢀ
支承轴构件
[0074]gꢀꢀꢀꢀ
玻璃板
[0075]eꢀꢀꢀꢀ
端面。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1