方便取料的模具用深冷箱的制作方法
1.本技术涉及深冷箱的领域,尤其是涉及一种方便取料的模具用深冷箱。
背景技术:
2.深冷处理作为热处理的一个补充过程,它是将工件置于一定的低温环境中,按照一定的工艺进行处理的过程,研究表明深冷处理能够有效改善材料的耐磨性、尺寸稳定性、强度以及韧性等机械性能,从而提高工件的质量,延长使用寿命,最终降低生产成本。
3.相关技术中一种用于模具加工的深冷箱,操作人员通过深冷箱对模具进行处理,但是深冷箱的内腔通常比较深,当模具处理完成后,不方便从深冷箱的内腔将模具取出,存在明显不足。
技术实现要素:
4.为了方便操作人员从深冷箱内取出模具,本技术提供一种方便取料的模具用深冷箱。
5.本技术提供的一种方便取料的模具用深冷箱采用如下的技术方案:
6.一种方便取料的模具用深冷箱,包括内部中空和顶部开口的箱体,所述箱体的顶部转动连接有箱盖,所述箱体内设有用于放置模具的承载板,所述箱体上还设有用于驱动承载板做竖向升降运动的驱动机构。
7.通过采用上述技术方案,操作人员将模具放置在承载板上,驱动机构能够带动承载板进行升降,承载板能够运动至箱体顶部开口的位置,以此操作人员从承载板上取下模具时比较方便。
8.可选的,所述驱动机构包括位于箱体内的两组升降组件,两组升降组件关于箱体宽度方向的轴线对称设置,所述升降组件包括转动穿设在箱体宽度方向两内侧壁之间的转动杆,所述承载板位于两个转动杆之间,所述转动杆上固定套设有两个升降臂,所述承载板相对箱体宽度方向的两个侧壁与同组升降组件的两个升降臂一一对应,所述承载板相对箱体宽度方向的两个侧壁上分别开有滑移槽,所述滑移槽平行于箱体的长度方向,所述升降臂远离转动杆的一端转动连接有滑移在对应滑移槽内的滑移件,所述箱体上还设有用于驱动两个转动杆反向转动的驱动组件。
9.通过采用上述技术方案,在驱动组件的运动下,两个转动杆能够反向转动,转动杆能够带动升降臂转动,升降臂上的滑移件在滑移槽内滑移,升降臂通过滑移件带动承载板竖向升降,以此承载板能够竖向上升至靠近箱体顶部的开口处。
10.可选的,所述驱动组件包括分别固定套设在两个转动杆上的从动齿轮,所述从动齿轮位于两个升降臂之外,两个从动齿轮之间箱体的内侧壁上转动连接有偶数个过渡齿轮,偶数个过渡齿轮沿箱体的长度方向布置且相邻两个过渡齿轮啮合,位于最两端的过渡齿轮分别与一个从动齿轮啮合,所述箱体外连接有电机,所述电机的输出轴穿过箱体的侧壁并延伸至箱体内,所述电机的输出轴位于箱体内的轴身上固定套设有主动齿轮,所述主
动齿轮与任意一个过渡齿轮啮合。
11.通过采用上述技术方案,启动电机,电机的输出轴带动主动齿轮转动,主动齿轮带动若干个过渡齿轮转动,若干个过渡齿轮带动两个从动齿轮转动,两个从动齿轮分别带动对应的转动杆转动,两个转动杆反向转动,因此两组升降组件能够同步带动承载板实现升降,以此提高了承载板的水平度。
12.可选的,所述承载板同一侧两个升降臂的长度和不大于两个转动杆之间的距离,所述升降臂的转动直径不大于箱体内腔的高度。
13.通过采用上述技术方案,通过采用上述的方式,当承载板从最高处运动至最低处时,升降臂能够做角度略小于180度的扇形运动,从而尽可能地扩大了承载板升降的范围。
14.可选的,所述箱体相对电机所在另一侧的内壁上竖向开有导向槽,所述导向槽内滑移有导向块,所述导向块延伸出导向槽并连接于承载板。
15.通过采用上述技术方案,当承载板做竖向的升降运动时,承载板能够带动导向块在导向槽内竖向滑移,导向块和导向槽的滑动配合对承载板起限位作用,减小了承载板在滑移件摩擦的作用下沿箱体长度方向运动的可能性。
16.可选的,所述滑移件为滚筒,所述滚筒的轴线垂直于滑移槽的长度方向。
17.通过采用上述技术方案,滑移件为滚筒设置使得滑移件在滑移槽内滑移时更加地顺畅。
18.可选的,所述承载板关于箱体宽度方向的轴线对称设置。
19.通过采用上述技术方案,对称设置有利于提高承载板对模具的承载效果,减小了模具在承载板上放置不均而导致承载板侧翻的可能性。
20.可选的,所述承载板的下表面固定连接有至少一条加强条,所述加强条平行于滑移槽的长度方向。
21.通过采用上述技术方案,加强条的设置对承载板的承载效果起加强作用,有利于减小两个升降组件的滑移件最接近时,承载板受模具的重力发生变形的可能性。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.1.驱动机构能够带动承载板进行升降,承载板能够运动至箱体顶部开口的位置,以此操作人员从承载板上取下模具时比较方便;
24.2.在驱动组件的运动下,两个转动杆能够反向转动,转动杆能够带动升降臂转动,升降臂上的滑移件在滑移槽内滑移,升降臂通过滑移件带动承载板竖向升降,以此承载板能够竖向上升至靠近箱体顶部的开口处。
附图说明
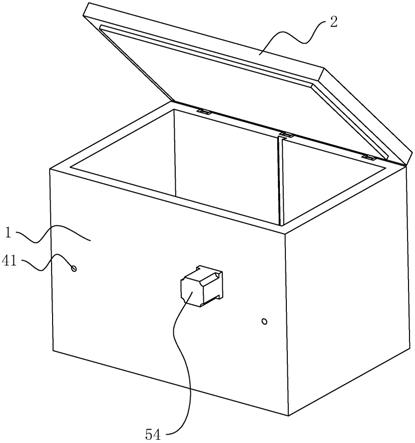
25.图1是用于体现本技术的结构示意图;
26.图2是用于体现本技术实施例中加强条的结构示意图;
27.图3是用于体现本技术实施例中从动齿轮的剖视图;
28.图4是用于体现本技术实施例中承载板的剖视图。
29.附图标记说明:1、箱体;11、导向槽;2、箱盖;3、承载板;31、滑移槽;41、转动杆;42、升降臂;43、固定销;44、滚筒;51、从动齿轮;52、过渡齿轮;53、主动齿轮;54、电机;6、导向块;7、加强条。
具体实施方式
30.以下结合附图1
‑
4对本技术作进一步详细说明。
31.本技术实施例公开一种方便取料的模具用深冷箱。参照图1,方便取料的模具用深冷箱包括内部中空且顶部开口的箱体1,箱体1的上表面转动连接有箱盖2。
32.参照图1和图2,箱体1内设有水平的承载板3,承载板3的长度方向平行于箱体1的长度方向,承载板3用于放置模具,箱体1内还设有用于驱动承载板3做竖向升降运动的驱动机构。
33.参照图1和图2,承载板3的下表面固定连接有三条加强条7,加强条7平行于承载板3,三条加强条7沿承载板3的宽度方向布置,相邻两个加强条7之间具有间距。加强条7的设置增强了承载板3的结构强度,减小了承载板3受模具的重力发生弯曲变形的可能性。
34.参照图1和图2,驱动机构包括两组升降组件和驱动组件,两组升降组件关于箱体1宽度方向的轴线对称设置,驱动组件设置于两组升降组件之间。
35.参照图1和图2,升降组件包括转动杆41和升降臂42,转动杆41水平设置且转动穿设在箱体1宽度方向的两内侧壁之间,转动杆41靠近箱体1长度方向的内侧壁,承载板3位于两个转动杆41之间,承载板3的长度不大于两个转动杆41之间的距离。
36.参照图1和图2,升降臂42的一端固定套设在转动杆41上,升降臂42沿转动杆41的宽度方向设置两个,承载板3相对箱体1宽度方向的两个侧壁与同组升降组件的两个升降臂42一一对应。
37.参照图1和图2,承载板3相对箱体1宽度方向的两个侧壁上分别开有滑移槽31,滑移槽31平行于承载板3,升降臂42远离转动杆41的一端转动连接在滑移在对应滑移槽31内的滑移件。
38.参照图1和图3,驱动组件包括主动齿轮53、电机54、过渡齿轮52、从动齿轮51。电机54栓接于箱体1外侧壁长度方向的一侧,电机54为正反转电机54,电机54的输出轴穿过箱体1的侧壁并延伸至箱体1内,主动齿轮53固定套设在电机54输出轴位于箱体1内的轴身上。
39.参照图1和图3,过渡齿轮52转动连接在箱体1内侧壁相对主动齿轮53的一侧,过渡齿轮52沿箱体1的长度方向设置有偶数个且相邻两个过渡齿轮52啮合,主动齿轮53位于偶数个过渡齿轮52的上方且与任意一个过渡齿轮52啮合。
40.参照图1和图3,从动齿轮51在两个转动杆41上分别固定套设有一个,从动齿轮51位于同一个转动杆41上的两个升降臂42之外,若干个过渡齿轮52均位于两个从动齿轮51之间,最两端的过渡齿轮52分别与一个从动齿轮51啮合。
41.参照图1和图3,启动电机54,电机54的输出轴带动主动齿轮53转动,主动齿轮53带动若干个过渡齿轮52转动,最两端的过渡齿轮52分别带动对应的从动齿轮51转动,从动齿轮51带动转动杆41转动,转动杆41带动升降臂42转动。
42.参照图2,升降臂42转动时,带动滑移件在滑移槽31内滑移,同时滑移件带动承载板3向上移动,当承载板3运动至最高处时,靠近箱体1顶部的开口,以此方便操作人员取走承载板3上的模具。
43.参照图2,由于承载板3不长于两个转动杆41之间的距离,因此承载板3最高处与最低处之间升价臂42转动的角度小于180度。
44.参照图2,承载板3同一侧两个升降臂42的长度和不大于两个转动杆41之间的距
离,同时升降臂42的转动直径不大于箱体1内腔的高度,以此承载板3最高处与最低处之间升价臂42转动的角度略小于180度,进一步扩大了承载板3的升降范围。
45.参照图3,承载板3关于箱体1宽度方向的轴线对称设置,对称设置有利于提高承载板3对模具的承载效果,减小了模具在承载板3上放置不均而导致承载板3侧翻的可能性。
46.参照图2,同组两个升价臂42相对的侧壁上分别固定连接有固定销43,固定销43远离转动杆41,固定销43平行于转动杆41,滑移件为转动套设在固定销43上的滚筒44。滑移件设置为滚筒44,以此在滑移槽31内滑移时更加地顺畅。
47.参照图4,箱体1相对电机54所在另一侧的内壁上竖向开有导向槽11,导向槽11为盲槽,其顶端与箱体1的上表面相通,其底端与箱体1内腔的底壁齐平。
48.导向槽11内滑移有导向块6,导向块6延伸出导向槽11并栓接于承载板3的上表面。导向块6和导向槽11的滑动配合对承载板3进行限位,减小了承载板3在滑移件摩擦的作用下沿箱体1长度方向移动的可能性。
49.本技术实施例一种方便取料的模具用深冷箱的实施原理为:启动电机54,电机54的输出轴带动主动齿轮53转动,主动齿轮53带动若干个过渡齿轮52转动,最两端的过渡齿轮52分别带动对应的从动齿轮51转动,从动齿轮51带动转动杆41转动,转动杆41带动升降臂42转动,升降臂42转动时,带动滚筒44在滑移槽31内滑移,同时滚筒44带动承载板3向上移动,当承载板3运动至最高处时,承载板3能够靠近箱体1顶部的开口,以此方便操作人员取走承载板3上的模具。重新启动电机54,电机54的输出轴反向转动,以此承载板3便能竖直向下运动。
50.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1