基于模壳制备的可控式旋转装置的制作方法
1.本实用新型属于铸造应用技术领域,具体涉及基于模壳制备的可控式旋转装置。
背景技术:
2.随着科学经济的进步与发展,自动化生产概念已经深入人心,同时也逐渐引入到工业生产企业中,主要可实现降低人工成本,提高经济效益以及产品品质,在特殊的制造工序中采用自动化生产替代操作工人,可保证操作工人的身体健康。
3.当前,在利用模壳进行合金铸造的作业工序中,注浆(合金熔液)后的成型模壳需要通过人工一个个的用工具夹起后,再挂至模壳架上,如此往复。
4.此工序采用人工作业,存在效率低,以及注浆夹起时模壳滑落的现象,当企业进行设备更新换代后,传统的人工操作更是无法适应,这是当前所亟需解决的。
5.因此,基于上述问题,本实用新型提供基于模壳制备的可控式旋转装置。
技术实现要素:
6.实用新型目的:本实用新型的目的是提供基于模壳制备的可控式旋转装置,其整体结构设计合理,解决背景技术中所存在的技术问题,尤其适用于a390铝合金(高硅过共晶铝合金)的模壳铸造自动化生产线使用。
7.技术方案:本实用新型提供的基于模壳制备的可控式旋转装置,由底支撑部件、驱动传动部件和模壳旋转部件组成;所述驱动传动部件安装在底支撑部件上,所述模壳旋转部件与驱动传动部件相配合使用;所述底支撑部件用于支撑安装驱动传动部件;所述驱动传动部件用于为模壳旋转部件提供水平旋转动力;所述模壳旋转部件用于与组成流水线模壳放机器人、模壳取机器人相配合使用,模壳放置在模壳旋转部件上。
8.本技术方案的,所述基于模壳制备的可控式旋转装置的底支撑部件,包括作业台,及设置在作业台上的箱体座,及设置在箱体座上的齿轮箱体。
9.本技术方案的,所述基于模壳制备的可控式旋转装置的驱动传动部件,包括设置在齿轮箱体内的主驱动齿轮、若干个副传动齿轮组件,及设置在箱体座上部端面的若干个支撑柱,及安装在若干个支撑柱上的驱动部,及设置在齿轮箱体外,且与若干个副传动齿轮组件接触的内齿轮,其中,驱动部与齿轮箱体内的主驱动齿轮连接,若干个副传动齿轮组件分别与主驱动齿轮接触。
10.本技术方案的,所述基于模壳制备的可控式旋转装置,还包括设置在箱体座外壁内的若干个副传动齿轮组件通槽,及设置在箱体座外壁,且位于副传动齿轮组件通槽下部与内齿轮相配合使用的固定支撑板,固定支撑板用于对水平安装的内齿轮进行支撑限位。
11.本技术方案的,所述基于模壳制备的可控式旋转装置的模壳旋转部件,包括设置在内齿轮外壁的若干个横支撑部,及分别设置在横支撑部一端的竖支撑部,及分别设置在竖支撑部上的模壳横支撑座。
12.本技术方案的,所述模壳旋转部件,还包括与相邻横支撑部一端相对面侧壁连接
的横固定连接板,及与相邻竖支撑部外壁连接的隔热板,及设置在模壳横支撑座一面内的模壳限位凹槽。
13.本技术方案的,所述模壳旋转部件,还包括与竖支撑部一端端面连接的固定板,及设置在固定板内层的圆形通槽,及设置在固定板外层的若干个气缸通孔,及设置在固定板外层,且位于气缸通孔上部的气缸安装套,及安装在气缸安装套内的竖升降气缸,及设置在竖升降气缸一端的敞开式模壳密封罩,其中,敞开式模壳密封罩包括但不限于圆形结构。
14.本技术方案的,所述模壳旋转部件,还包括设置在竖升降气缸一端的外螺柱,及设置在敞开式模壳密封罩一端端面的外螺柱连接块,及设置在外螺柱连接块内的内螺纹孔,及设置在外螺柱上的外螺柱螺母。
15.本技术方案的,所述模壳旋转部件,还包括分别设置在竖支撑部一端端面的竖螺杆,及设置在固定板内位于圆形通槽、气缸通孔之间,且与竖螺杆相配合使用的固定板通孔,及设置在竖螺杆上,用于调整固定板的一组升降调整锁紧螺母,其中,固定板设置为圆形板式结构,竖支撑部包括但不限于竖圆柱形结构或竖板式结构。
16.与现有技术相比,本实用新型的基于模壳制备的可控式旋转装置的有益效果在于:1、其整体结构设计合理,便于进行装配使用,与生产线的模壳机器人相配合使用,替代传统的人工夹取模壳操作,实现自动化的生产要求;2、旋转速度依模壳的不同、机器人(模壳放机器人、模壳取机器人)放/取速度的不同进行同步的控制调速,而此时竖升降气缸的升/降速度进行同步的调整控制; 3、装配使用便捷,无需对模壳注浆设备和模壳挂放设备进行改进,只需设置安装在模壳注浆设备、模壳挂放设备之间即可;4、提高模壳合金铸造产品的生产效率和产品品质,作业状态安全、稳定和可靠。
附图说明
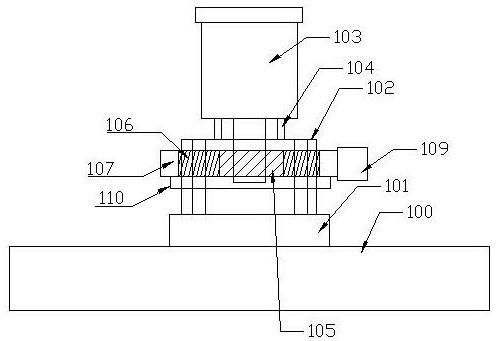
17.图1是本实用新型的基于模壳制备的可控式旋转装置的底支撑部件、驱动传动部件等的主视剖视部分结构示意图;
18.图2是本实用新型的基于模壳制备的可控式旋转装置的齿轮箱体、若干个支撑柱、若干个副传动齿轮组件通槽的主视剖视结构示意图;
19.图3是本实用新型的基于模壳制备的可控式旋转装置的驱动传动部件、模壳旋转部件等的俯视部分结构示意图;
20.图4是本实用新型的基于模壳制备的可控式旋转装置的旋转部件的主视剖视结构示意图;
21.图5是本实用新型的基于模壳制备的可控式旋转装置的安装使用俯视部分结构示意图;
22.其中,图纸序号如下:100-作业台、101-箱体座、102-齿轮箱体、103-驱动部、104-支撑柱、105-主驱动齿轮、106-副传动齿轮组件、107-内齿轮、 108-副传动齿轮组件通槽、109-圆形保护圈、110-固定支撑板、200-横支撑部、 201-横固定连接板、202-隔热板、203-竖支撑部、204-模壳横支撑座、205-模壳限位凹槽、300-竖螺杆、301-升降调整锁紧螺母、302-固定板、303-固定板通孔、304-圆形通槽、305-气缸通孔、306-气缸安装套、307-竖升降气缸、 308-外螺柱、309-外螺柱螺母、310-螺柱连接块外、311-内螺纹孔、312-敞开式模壳密封罩。
具体实施方式
23.下面结合附图和具体实施例,进一步阐明本实用新型。
24.如图1、图2、图3、图4和图5所示的基于模壳制备的可控式旋转装置,由底支撑部件、驱动传动部件和模壳旋转部件组成;所述驱动传动部件安装在底支撑部件上,所述模壳旋转部件与驱动传动部件相配合使用;所述底支撑部件用于支撑安装驱动传动部件;所述驱动传动部件用于为模壳旋转部件提供水平旋转动力;所述模壳旋转部件用于与组成流水线模壳放机器人、模壳取机器人相配合使用,模壳放置在模壳旋转部件上。
25.本结构的基于模壳制备的可控式旋转装置优选的底支撑部件,包括作业台 100(可设置为带刹车轮的可移动结构),及设置在作业台100上的箱体座 101(设置为圆形结构),及设置在箱体座101上的齿轮箱体102(设置为圆形结构或正方形结构)。
26.本结构的基于模壳制备的可控式旋转装置优选的驱动传动部件,包括设置在齿轮箱体102内的主驱动齿轮105、若干个副传动齿轮组件106,及设置在箱体座101上部端面的若干个支撑柱104,及安装在若干个支撑柱104上的驱动部103(减速电机),及设置在齿轮箱体102外,且与若干个副传动齿轮组件 106接触的内齿轮107,其中,驱动部103与齿轮箱体102内的主驱动齿轮105 连接,若干个副传动齿轮组件106分别与主驱动齿轮105接触,驱动部103、主驱动齿轮105、若干个副传动齿轮组件106、内齿轮107均未市场采购的成熟技术产品。
27.本结构的基于模壳制备的可控式旋转装置优选的模壳旋转部件,包括设置在内齿轮107外壁的若干个横支撑部200,及分别设置在横支撑部200一端的竖支撑部203,及分别设置在竖支撑部203上的模壳横支撑座204(耐热),注浆后的模壳通过模壳放机器人夹起后放置在模壳横支撑座204上。
28.本结构的模壳旋转部件优选的,还包括与相邻横支撑部200一端相对面侧壁连接的横固定连接板201,及与相邻竖支撑部203外壁连接的隔热板202,隔热板202用于将注浆后模壳发散的热量进行遮挡,放置对竖支撑部203等造成损伤,及设置在模壳横支撑座204一面内的模壳限位凹槽205,模壳限位凹槽 205防止注浆后的模壳在旋转传输过程中出现倾倒或跌落模壳横支撑座204的现象。
29.本结构的模壳旋转部件优选的,还包括与竖支撑部203一端端面连接的固定板302,及设置在固定板302内层的圆形通槽304,及设置在固定板302外层的若干个气缸通孔305,及设置在固定板302外层,且位于气缸通孔305上部的气缸安装套306,及安装在气缸安装套306内的竖升降气缸307,及设置在竖升降气缸307一端的敞开式模壳密封罩312(保温),其中,敞开式模壳密封罩312包括但不限于圆形结构,竖升降气缸307控制敞开式模壳密封罩312升/ 降将注浆后模壳罩入,起到保温的作用,也防止注浆后模壳跌落模壳横支撑座 204,出现更大损毁的问题。
30.本结构的模壳旋转部件优选的,还包括设置在竖升降气缸307一端的外螺柱308,及设置在敞开式模壳密封罩312一端端面的外螺柱连接块310,及设置在外螺柱连接块310内的内螺纹孔311,及设置在外螺柱308上的外螺柱螺母 309,便于敞开式模壳密封罩312装配,以及后续依据模壳的尺寸快速对敞开式模壳密封罩312进行同步更换(适应模壳尺寸更换)。
31.本结构的模壳旋转部件优选的,还包括分别设置在竖支撑部203一端端面的竖螺
杆300,及设置在固定板302内位于圆形通槽304、气缸通孔305之间,且与竖螺杆300相配合使用的固定板通孔303,及设置在竖螺杆300上,用于调整固定板302的一组升降调整锁紧螺母301,其中,固定板302设置为圆形板式结构,竖支撑部203包括但不限于竖圆柱形结构或竖板式结构,可依据不同的模壳尺寸对竖升降气缸307、敞开式模壳密封罩312进行装配时适应性升/ 降调整,提高竖升降气缸307、敞开式模壳密封罩312的实用性,同时上述设计构成组合式结构,也便于进行组装或拆卸、维护。
32.本结构的基于模壳制备的可控式旋转装置,还包括设置在箱体座101外壁内的若干个副传动齿轮组件通槽108,及设置在箱体座101外壁,且位于副传动齿轮组件通槽108下部与内齿轮107相配合使用的固定支撑板110,固定支撑板110用于对水平安装的内齿轮107进行支撑限位,组装时副传动齿轮组件 106凸出副传动齿轮组件通槽108,并与内齿轮107啮合实现动力传动。
33.本实用新型的应用一种模壳制备的自动化生产线,包含装配有所述的基于模壳制备的可控式旋转装置。
34.此外,本结构的基于模壳制备的可控式旋转装置的模壳旋转部件,内齿轮 107外壁设置有圆形保护圈109,若干个横支撑部200的另一端分别与圆形保护圈109固定焊接连接,或在内齿轮107外壁内设置螺孔,圆形保护圈109内设置螺孔,通过紧固螺杆、内齿轮107内螺孔和圆形保护圈109内螺孔将内齿轮107、圆形保护圈109锁紧固定连接,这种设计便于装配和维护,以及后续拆解后的运输。
35.实施例
36.首先模壳放机器人将注浆后模壳夹起放置在模壳横支撑座204一面的模壳限位凹槽205内,
37.然后模壳放机器人移出模壳横支撑座204作业面,此时,竖升降气缸307 下移带动敞开式模壳密封罩312同步下落将注浆后模壳罩入敞开式模壳密封罩 312内,
38.然后驱动部103启动通过主驱动齿轮105旋转驱动若干个副传动齿轮组件 106旋转,此时,若干个副传动齿轮组件106旋转同步驱动内齿轮107旋转,旋转内齿轮107联动横支撑部200、模壳横支撑座204同步旋转,如此往复;
39.最后壳横支撑座204旋转至模壳取机器人时,竖升降气缸307上移带动敞开式模壳密封罩312同步上升将注浆后模壳漏出敞开式模壳密封罩312,
40.此时模壳取机器人移入模壳横支撑座204作业面将注浆模壳取出挂至模壳流水框架线上,
41.而模壳取机器人移出模壳横支撑座204作业面后,竖升降气缸307保持上移动作;
42.当空的模壳横支撑座204旋转进入模壳放机器人作业面后,模壳放机器人重复夹起放置动作。
43.上述的旋转控制动作是:
44.①
驱动部103停止时,模壳横支撑座204分别运行至模壳放机器人作业面、模壳取机器人作业面,模壳放机器人与模壳取机器人同步动作;
45.②
模壳放机器人模壳放置后移出作业面、模壳取机器人取出模壳移出作业面,驱动部103启动,重复
①
的动作。
46.在模壳取机器人取出模壳后至模壳放机器人放置模壳之前,敞开式模壳密封罩
312通过竖升降气缸307控制上移打开。
47.在模壳取机器人取出模壳之前至模壳放机器人放置模壳后,敞开式模壳密封罩312通过竖升降气缸307控制下移关闭(将模壳罩入)。
48.另外,驱动部103可设置为持续旋转,此种设计进一步的可提高效率,同时此种设计时,模壳限位凹槽205尺寸大于注浆后模壳的尺寸(预留误差)。
49.本结构的驱动部103、竖升降气缸307、模壳取机器人和模壳放机器人采用 plc控制器同步设置参数控制(plc控制器为市场成熟技术产品)。
50.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以作出若干改进,这些改进也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1