一种建筑钢结构表面加工机器人的制作方法
本发明涉及钢结构表面处理,具体为一种建筑钢结构表面加工机器人。
背景技术:
1、钢结构表面的锈斑可能会导致结构破损或减弱承载能力的情况发生,进而会影响钢结构的安全性以及耐久性,因而需要对锈斑进行适当的处理,常见的处理方式是对钢结构的表面进行打磨以去除锈斑。
2、目前,钢结构表面除锈打磨一般会采用人工打磨,但因钢结构的上下左右四个方向的侧面上均会产生锈斑,在除锈的过程中需要对四个方向的侧面进行除锈处理,此时,采用人工打磨不仅效率低,且对高层建筑的钢结构进行打磨时,人工进行高空作业的危险性较高。
技术实现思路
1、本发明提供建筑钢结构表面加工机器人,以解决相关技术中打磨效率低,危险性高的问题。
2、本发明提供了一种建筑钢结构表面加工机器人,该建筑钢结构表面加工机器人包括移动机构,移动机构上设置有装载机构,装载机构上安装有打磨执行机构,所述打磨执行机构包括打磨头和安装组件,二者一一对应且打磨头呈矩状分布并通过相应的安装组件安装在装载机构上,安装组件包括连接座和限位槽,连接座上滑动设置有控制板,打磨头安装在控制板上,连接座上还滑动设置有总控件和若干分控件,分控件两个为一组且其中一个固定连接在控制板上、另一个与限位槽一一对应且相互配合,装载机构包括往复滑动的滑动座,滑动座上设置有带内置矩状装载面的装载架,连接座可拆卸连接在矩状装载面上,限位槽开设在矩状装载面上,工作状态下,打磨头分别从四个方向对打磨件相应的面进行打磨且打磨头上的打磨面与打磨件相应面的结构形状相同。
3、在一种可能实施的方式中,所述打磨头包括用于对打磨件相应面结构进行模拟的模拟板架,模拟板架上贴附有打磨纸,模拟板架上设置有端部固定夹和矩形状的压合限位框,压合限位框包括对称的旁侧压框和对称的端侧压框,模拟板架上设置有容纳端侧压框的容纳槽,其中,压合限位框的压合面呈倾斜状。
4、在一种可能实施的方式中,所述装载架包括u形结构的架体一和直线性结构的架体二,二者分别连接在对应的滑动座且架体一和架体二之间连接有对拉锁紧组件,所述总控件包括齿条和若干同步齿轮,同步齿轮啮合连接在同组内的两个分控件之间,且同步齿轮均与齿条啮合,齿条滑动连接在连接座上,装载架上滑动设置有推动件,随着架体一和架体二对拉锁紧,推动件会推动相应的齿条滑动进而带动同步齿轮转动控制相应的分控件滑动。
5、在一种可能实施的方式中,所述对拉锁紧组件包括拉动件、控制件以及弹性间隔件,拉动件固定连接在架体一上,控制件转动连接在架体二上,弹性间隔件连接在架体二上且对架体二与架体一进行限位间隔,控制件通过拉动件将架体一与架体二对拉锁紧在一起,在对拉锁定的过程中,同时控制弹性间隔件不在对架体一与架体二进行限位。
6、在一种可能实施的方式中,所述装载架上设置有定位柱,定位柱对称分布且分别连接在架体一和架体二上。
7、本发明实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:1、根据本发明实施例提供的一种建筑钢结构表面加工机器人,打磨执行机构从上下左右四个方向同步的对钢材的表面进行打磨除锈,有效提高打磨的效率以及打磨作业的安全性并可充分的对钢材前后端连接处的区域进行打磨,有效提高了打磨的效果和打磨的便利度,同时通过装载机构与打磨执行机构的配合,不仅便于在打磨除锈作业中对打磨头进行更换,且整体结构稳定性高,相应的提高了打磨除锈作业的稳定性,其次还具有较高的经济实用性。
8、2、根据本发明实施例提供的一种建筑钢结构表面加工机器人,总控件与分控件对打磨头与打磨面的位置状态进行控制的同时,进一步提高了装置架与连接座连接的稳定性,不仅便于对打磨头进行更换,而且进一步提高了打磨过程的稳定性。
9、3、根据本发明实施例提供的一种建筑钢结构表面加工机器人,在更换打磨头的过程中,只需对打磨纸进行更换即可,有效提高了本发明的经济实用性,且通过端部固定夹与压合限位框从端部以及侧面对打磨纸进行固定,提高了打磨纸与模拟板架贴合的稳定性,相应的提高了打磨过程的稳定性。
技术特征:
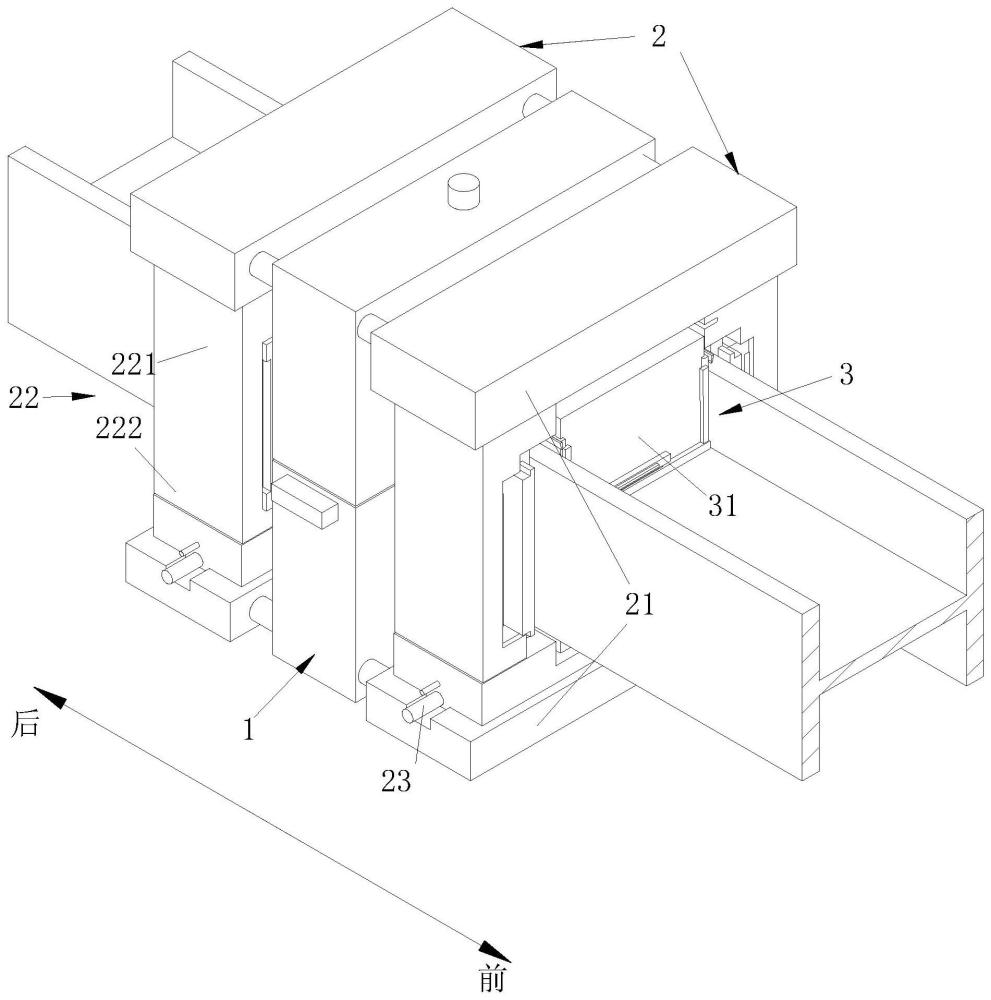
1.一种建筑钢结构表面加工机器人,其特征在于:包括移动机构(1),移动机构(1)上设置有装载机构(2),装载机构(2)上安装有打磨执行机构(3);
2.根据权利要求1所述的一种建筑钢结构表面加工机器人,其特征在于:所述打磨头(31)包括用于对打磨件相应面结构进行模拟的模拟板架(311),模拟板架(311)上贴附有打磨纸并形成了打磨面,模拟板架(311)上设置有端部固定夹(312)和压合限位框(313),端部固定夹(312)安装在模拟板架(311)上且从两端对打磨纸进行固定,压合限位框(313)可拆卸连接在模拟板架(311)的上且位于打磨纸的侧边处对打磨纸的侧边进行压合固定。
3.根据权利要求1或2所述的一种建筑钢结构表面加工机器人,其特征在于:所述装载架(22)包括u形结构的架体一(221)和直线性结构的架体二(222),二者分别连接在对应的滑动座(21)且架体一(221)和架体二(222)之间连接有对拉锁紧组件(23),所述总控件(324)包括齿条(3241)和若干同步齿轮(3242),同步齿轮(3242)啮合连接在同组内的两个分控件(325)之间,且同步齿轮(3242)均与齿条(3241)啮合,齿条(3241)滑动连接在连接座(321)上,装载架(22)上滑动设置有推动件(24),随着架体一(221)和架体二(222)对拉锁紧,推动件(24)会推动相应的齿条(3241)滑动进而带动同步齿轮(3242)转动控制相应的分控件(325)滑动。
4.根据权利要求3所述的一种建筑钢结构表面加工机器人,其特征在于:所述对拉锁紧组件(23)包括拉动件(231)、控制件(232)以及弹性间隔件(233),拉动件(231)固定连接在架体一(221)上,控制件(232)转动连接在架体二(222)上,弹性间隔件(233)连接在架体二(222)上且对架体二(222)与架体一(221)进行限位间隔,控制件(232)通过拉动件(231)将架体一(221)与架体二(222)对拉锁紧在一起,在对拉锁定的过程中,同时控制弹性间隔件(233)不在对架体一(221)与架体二(222)进行限位。
5.根据权利要求4所述的一种建筑钢结构表面加工机器人,其特征在于:所述装载架(22)上设置有定位柱(25),定位柱(25)对称分布且分别连接在架体一(221)和架体二(222)上。
6.根据权利要求2所述的一种建筑钢结构表面加工机器人,其特征在于:所述压合限位框(313)的压合面呈倾斜状。
技术总结
本发明提供一种建筑钢结构表面加工机器人,属于钢结构表面处理技术领域,包括装载机构,装载机构上安装有打磨执行机构,所述打磨执行机构包括打磨头和安装组件,二者一一对应且打磨头呈矩状分布并通过相应的安装组件安装在装载机构上。该建筑钢结构表面加工机器人,打磨执行机构从上下左右四个方向同步的对钢材的表面进行打磨除锈,有效提高打磨的效率以及打磨作业的安全性并可充分的对钢材前后端连接处的区域进行打磨,有效提高了打磨的效果和打磨的便利度,同时通过装载机构与打磨执行机构的配合,不仅便于在打磨除锈作业中对打磨头进行更换,且整体结构稳定性高,相应的提高了打磨除锈作业的稳定性,其次还具有较高的经济实用性。
技术研发人员:仝晓朋
受保护的技术使用者:江苏博发机器人智能装备有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!