一种机器人打磨用工件精确拿取系统的制作方法
本发明涉及圆柱件或圆管件辅助加工装置,具体地涉及一种机器人打磨用工件精确拿取系统。
背景技术:
1、圆柱件或圆管件在加工过程中需要对端部进行加工,例如打磨,那么则需要将传输线上的圆柱件或圆管件通过人工的方式抓取至相应的工装上将圆柱件或圆管件竖直摆放,进行逐个操作,该操作方式效率低下。
2、若使用现有成熟的机械手对圆柱件或圆管件进行抓取,无法对圆柱件或圆管件进行翻转摆正,同时也无法对圆柱件或圆管件的加工高度进行调整,因此,需要一种更有效的机器人打磨用工件精确拿取系统。
技术实现思路
1、本发明的目的是提供一种机器人打磨用工件精确拿取系统,该工件精确拿取系统配合机械臂能够迅速识别传输线上卧倒的圆柱件或圆管件,并能够调整抓取位姿,从而将圆柱件或圆管件进行夹取,夹取后能够将圆柱件或圆管件翻转至竖直状态并对圆柱件或圆管件的端部进行加工,同时还能够在抓取圆柱件或圆管件后对抓取的圆柱件或圆管件高度进行调整。
2、为了实现上述目的,本发明提供了一种机器人打磨用工件精确拿取系统,该机器人打磨用工件精确拿取系统包括:转动连接在机械臂端部的u型架;所述u型架的开口朝下且内部通过转轴设置有气动夹爪,所述u型架的侧面设置有与所述气动夹爪轴连接的翻转电机;所述气动夹爪的后侧设置有伸缩气缸,所述伸缩气缸的端部固接有与所述夹爪相平行的伸缩板;所述气动夹爪的前端位于两个所述夹爪之间设有视觉摄像头。
3、优选地,所述伸缩板的活动板上面向所述夹爪的一侧设有定位槽。
4、优选地,所述u型架的上端连接有旋转电机;所述旋转电机安装在固定架上;所述固定架与所述机械臂端部固接。
5、优选地,所述固定架与所述机械臂端部之间设置有多轴气缸。
6、优选地,所述固定架包括平行设置的第一架板和第二架板;所述第一架板和第二架板之间通过多个连接杆连接;所述第一架板连接所述机械臂端部;所述旋转电机的轴体依次贯穿所述第一架板和第二架板设置。
7、优选地,所述第二架板的侧面设置有延长段,所述延长段上安装有丝杆电机,所述延长段的下方设置有活动板,所述丝杆电机的丝杆与所述活动板之间螺纹配合连接,所述第二架板的下端设置有多个导向杆,所述活动板上设置有套设于所述导向杆的导向孔,所述活动板的底部设置有打磨装置。
8、优选地,所述导向杆的下端套设有限位螺母。
9、优选地,所述打磨装置包括打磨电机,所述打磨电机的打磨轴下端沿周向设置有多个打磨片,多个所述打磨片呈自上而下向外扩张的方式延伸。
10、优选地,所述打磨轴上设置有限位槽,所述限位槽内转动套设有伞型吸尘罩,所述伞型吸尘罩通过吸尘管道与外部吸尘设备连接。
11、优选地,所述伞型吸尘罩与所述打磨电机之间通过固定架连接。
12、根据上述技术方案,本发明中的机器人打磨用工件精确拿取系统配合机械臂能够迅速识别传输线上卧倒的圆柱件或圆管件,并能够调整抓取位姿,从而将圆柱件或圆管件进行夹取,夹取后能够将圆柱件或圆管件翻转至竖直状态并对圆柱件或圆管件的端部进行加工,同时还能够在抓取圆柱件或圆管件后对抓取的圆柱件或圆管件高度进行调整。
13、本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种机器人打磨用工件精确拿取系统,其特征在于,所述机器人打磨用工件精确拿取系统包括:转动连接在机械臂端部的u型架(8);
2.根据权利要求1所述的机器人打磨用工件精确拿取系统,其特征在于,所述伸缩板(11)的活动板(17)上面向所述夹爪的一侧设有定位槽(12)。
3.根据权利要求1所述的机器人打磨用工件精确拿取系统,其特征在于,所述u型架(8)的上端连接有旋转电机(3);
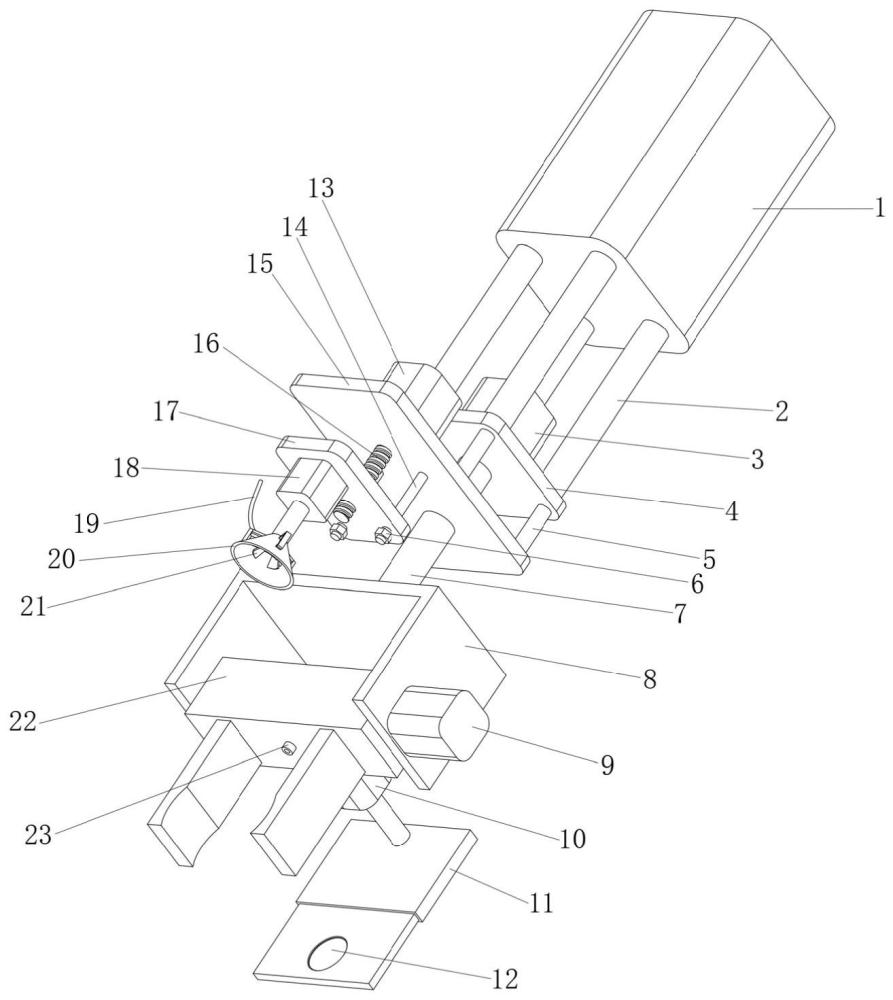
4.根据权利要求3所述的机器人打磨用工件精确拿取系统,其特征在于,所述固定架(25)与所述机械臂端部之间设置有多轴气缸(1),所述多轴气缸(1)的伸缩轴(2)连接所述固定架(25)的上端。
5.根据权利要求3所述的机器人打磨用工件精确拿取系统,其特征在于,所述固定架(25)包括平行设置的第一架板(4)和第二架板(15);
6.根据权利要求5所述的机器人打磨用工件精确拿取系统,其特征在于,所述第二架板(15)的侧面设置有延长段;
7.根据权利要求6所述的机器人打磨用工件精确拿取系统,其特征在于,所述导向杆(14)的下端套设有限位螺母(6)。
8.根据权利要求6所述的机器人打磨用工件精确拿取系统,其特征在于,所述打磨装置包括打磨电机(18);
9.根据权利要求8所述的机器人打磨用工件精确拿取系统,其特征在于,所述打磨轴(26)上设置有限位槽;
10.根据权利要求9所述的机器人打磨用工件精确拿取系统,其特征在于,所述伞型吸尘罩(20)与打磨电机(18)之间通过固定架(25)连接。
技术总结
本发明公开了一种机器人打磨用工件精确拿取系统,包括:转动连接在机械臂端部的U型架;U型架的开口朝下且内部通过转轴设置有气动夹爪,U型架的侧面设置有与气动夹爪轴连接的翻转电机;气动夹爪的后侧设置有伸缩气缸,伸缩气缸的端部固接有与夹爪相平行的伸缩板;气动夹爪的前端位于两个夹爪之间设有视觉摄像头。该机器人打磨用工件精确拿取系统配合机械臂能够迅速识别传输线上卧倒的圆柱件或圆管件,并能够调整抓取位姿,从而将圆柱件或圆管件进行夹取,夹取后能够将圆柱件或圆管件翻转至竖直状态并对圆柱件或圆管件的端部进行加工,同时还能够在抓取圆柱件或圆管件后对抓取的圆柱件或圆管件高度进行调整。
技术研发人员:张诚,祝超杰
受保护的技术使用者:华孚精密科技(马鞍山)有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!