一种研磨机器人吸尘装置
本技术涉及研磨机器人,具体为一种研磨机器人吸尘装置。
背景技术:
1、地坪研磨机是已知的并且用于抛光或研磨地坪表面,其目的是产生平整和/或有光泽的地坪表面、或者其目的是翻新由于例如磨损而变坏或已经被损坏的此类表面。研磨机器人在对地坪进行打磨时,会产生大量粉尘,目前,一些研磨机器上会安装吸尘装置对粉尘进行吸收。
2、然而,目前的吸尘装置吸尘效果有限。首先,当装置移动的速度较快,或者打磨的量较大时,吸尘装置难以及时将打磨区域的粉尘完全吸收,容易造成粉尘逃逸现象。其次,吸尘口容易发生堵塞,导致吸尘量下降甚至失去吸尘效果,虽然一些装置中设置有多个吸尘口,然而当其中某个吸尘口发生堵塞时,仍会导致该吸尘口附近的粉尘产生滞留,吸尘效果不佳。鉴于此,我们提出一种研磨机器人吸尘装置。
技术实现思路
1、本实用新型的目的在于提供一种研磨机器人吸尘装置,该研磨机器人吸尘装置,解决了背景技术中的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
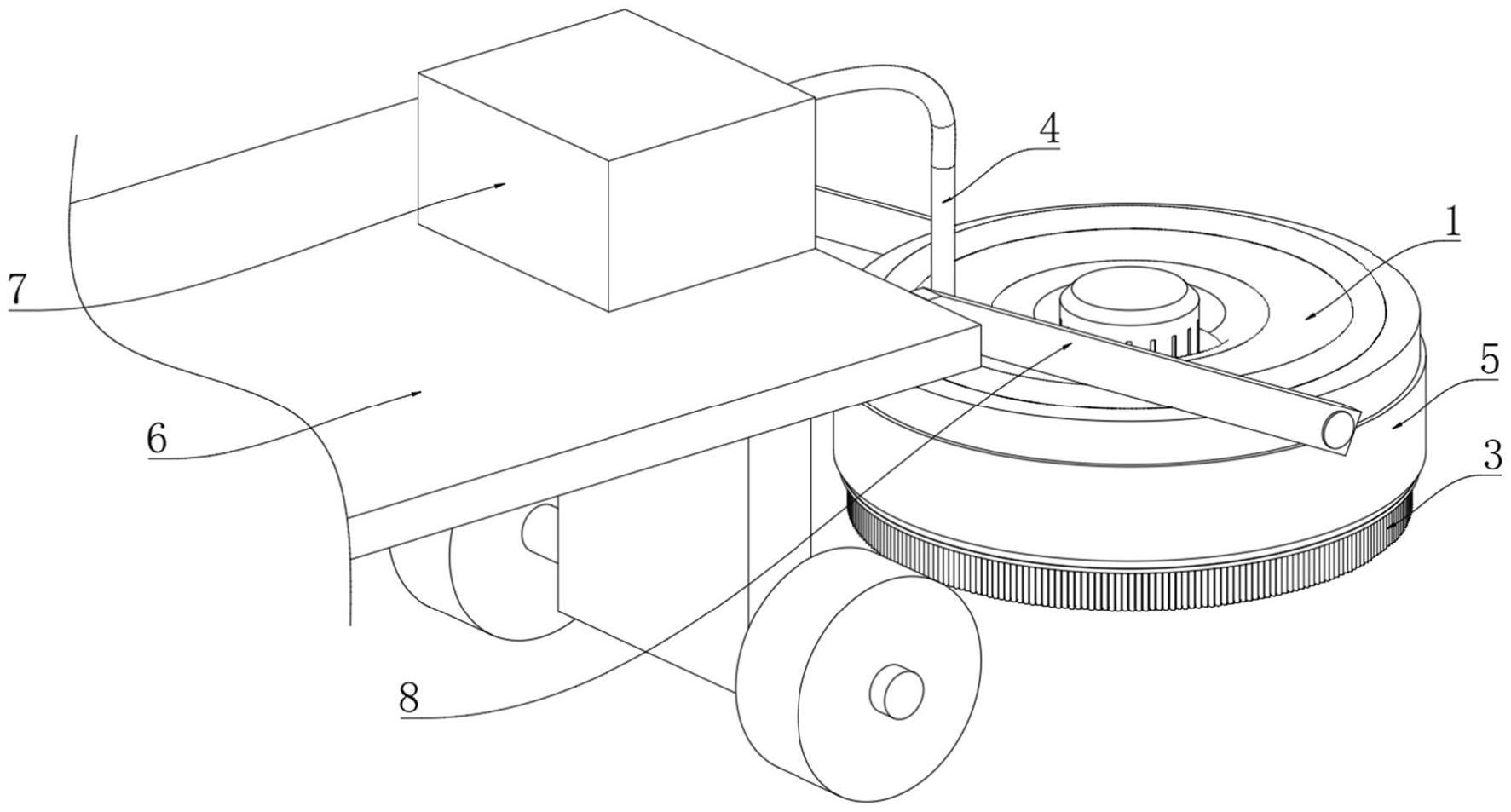
3、一种研磨机器人吸尘装置,包括机壳,所述机壳底部转动安装有研磨盘,所述机壳的底部开设有环形凹槽,所述环形凹槽上方设置有吸尘机构,所述机壳上设置有围挡机构,所述围挡机构包括转盘,所述转盘底部固定安装有柔性围挡。
4、优选的,所述转盘的上表面与所述机壳的下表面相贴合,所述转盘的内壁上固定安装有第一吸尘管,所述第一吸尘管的顶端贯穿所述转盘并延伸至所述环形凹槽内。
5、优选的,所述转盘的顶部固定安装有转动环,所述转动环转动安装在所述机壳的内壁上,所述转动环的顶端固定安装有齿环,所述齿环的表面啮合有齿轮,所述齿轮的轴心处固定安装有控制电机,所述控制电机固定安装在所述机壳上。
6、优选的,所述第一吸尘管的数量为多个,多个所述第一吸尘管以所述环形凹槽的轴线为中心呈圆形阵列分布。
7、优选的,所述吸尘机构包括过渡管,所述过渡管固定安装在所述机壳上,所述过渡管上固定安装有风机连接管,所述过渡管的底部固定安装有第二吸尘管,所述第二吸尘管的底端贯穿所述机壳并延伸至所述环形凹槽内。
8、优选的,所述机壳上设置有遮挡机构,所述遮挡机构包括活动环,所述活动环的内壁上开设有滑槽,所述滑槽的内壁上滑动安装有磁吸板,所述磁吸板固定安装在所述机壳上。
9、优选的,所述滑槽的顶部镶嵌有第一磁块,所述滑槽的底部镶嵌有第二磁块,所述第二磁块与所述磁吸板相对的面磁极相反,所述第一磁块与所述磁吸板相对的面磁极相反。
10、借由上述技术方案,本实用新型提供了一种研磨机器人吸尘装置。至少具备以下有益效果:
11、(1)、该研磨机器人吸尘装置,通过柔性围挡对打磨区域进行包裹,在研磨时,柔性围挡能够与地面接触,并随着机器运动,从而能够避免粉尘逃逸,使得吸尘机构能够更好的将粉尘吸除干净,通过设置吸尘机构,能够对粉尘进行吸除,吸尘机构中的进尘口可以转动,从而不断改变吸尘位置,避免粉尘在某处滞留,保证吸尘效果。
12、(2)、该研磨机器人吸尘装置,通过设置活动环,可以对柔性围挡进行包裹,避免柔性围挡转动时有大量粉尘被甩出,从而便于对柔性围挡进行自清洁,通过磁吸板与第一磁块和第二磁块的配合,能够提高活动环的稳定性。
技术特征:
1.一种研磨机器人吸尘装置,包括机壳(1),所述机壳(1)底部转动安装有研磨盘(2),其特征在于,所述机壳(1)的底部开设有环形凹槽(11),所述环形凹槽(11)上方设置有吸尘机构(4),所述机壳(1)上设置有围挡机构(3),所述围挡机构(3)包括转盘(31),所述转盘(31)底部固定安装有柔性围挡(32)。
2.根据权利要求1所述的研磨机器人吸尘装置,其特征在于,所述转盘(31)的上表面与所述机壳(1)的下表面相贴合,所述转盘(31)的内壁上固定安装有第一吸尘管(33),所述第一吸尘管(33)的顶端贯穿所述转盘(31)并延伸至所述环形凹槽(11)内。
3.根据权利要求1所述的研磨机器人吸尘装置,其特征在于,所述转盘(31)的顶部固定安装有转动环(34),所述转动环(34)转动安装在所述机壳(1)的内壁上,所述转动环(34)的顶端固定安装有齿环(35),所述齿环(35)的表面啮合有齿轮(36),所述齿轮(36)的轴心处固定安装有控制电机(37),所述控制电机(37)固定安装在所述机壳(1)上。
4.根据权利要求2所述的研磨机器人吸尘装置,其特征在于,所述第一吸尘管(33)的数量为多个,多个所述第一吸尘管(33)以所述环形凹槽(11)的轴线为中心呈圆形阵列分布。
5.根据权利要求1所述的研磨机器人吸尘装置,其特征在于,所述吸尘机构(4)包括过渡管(41),所述过渡管(41)固定安装在所述机壳(1)上,所述过渡管(41)上固定安装有风机连接管(42),所述过渡管(41)的底部固定安装有第二吸尘管(43),所述第二吸尘管(43)的底端贯穿所述机壳(1)并延伸至所述环形凹槽(11)内。
6.根据权利要求1所述的研磨机器人吸尘装置,其特征在于,所述机壳(1)上设置有遮挡机构(5),所述遮挡机构(5)包括活动环(51),所述活动环(51)的内壁上开设有滑槽(511),所述滑槽(511)的内壁上滑动安装有磁吸板(52),所述磁吸板(52)固定安装在所述机壳(1)上。
7.根据权利要求6所述的研磨机器人吸尘装置,其特征在于,所述滑槽(511)的顶部镶嵌有第一磁块(53),所述滑槽(511)的底部镶嵌有第二磁块(54),所述第二磁块(54)与所述磁吸板(52)相对的面磁极相反,所述第一磁块(53)与所述磁吸板(52)相对的面磁极相反。
技术总结
本技术涉及研磨机器人技术领域,具体为一种研磨机器人吸尘装置,包括机壳,所述机壳底部转动安装有研磨盘,所述机壳的底部开设有环形凹槽,所述环形凹槽上方设置有吸尘机构,所述机壳上设置有围挡机构,所述围挡机构包括转盘,所述转盘底部固定安装有柔性围挡。该研磨机器人吸尘装置,通过柔性围挡对打磨区域进行包裹,在研磨时,柔性围挡能够与地面接触,并随着机器运动,从而能够避免粉尘逃逸,使得吸尘机构能够更好的将粉尘吸除干净,通过设置吸尘机构,能够对粉尘进行吸除,吸尘机构中的进尘口可以转动,从而不断改变吸尘位置,避免粉尘在某处滞留,保证吸尘效果。
技术研发人员:夏鑫,沈灵杰,黄磊,廖作栋,甘凡萍,陈萍
受保护的技术使用者:泉州轻工职业学院
技术研发日:20230625
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!